起重机自动抓具模拟体研究★
2022-07-07林钰茗霍贵龙胡敦忠薛毅馨
林钰茗, 霍贵龙, 胡敦忠, 薛毅馨
(1.华能山东石岛湾核电有限公司, 山东 威海 264200;2.太原重工股份有限公司技术中心, 山西 太原 030000;3.太原重工股份有限公司起重机分公司, 山西 太原 030000)
引言
某起重机是乏燃料贮存系统中的重要设备,用于反应堆运行时乏燃料的贮存和排空堆芯时燃料元件的暂存。其功能是按指令要求将乏燃料贮罐运送和吊装到指定位置;并在需要时,按指令将乏燃料贮罐从指定位置吊出,经转运孔装入屏蔽转运罐内外运,或运行至装料位置通过抽吸的方式将暂存的燃料元件送回堆芯。自动抓具结构简图如图1 所示。
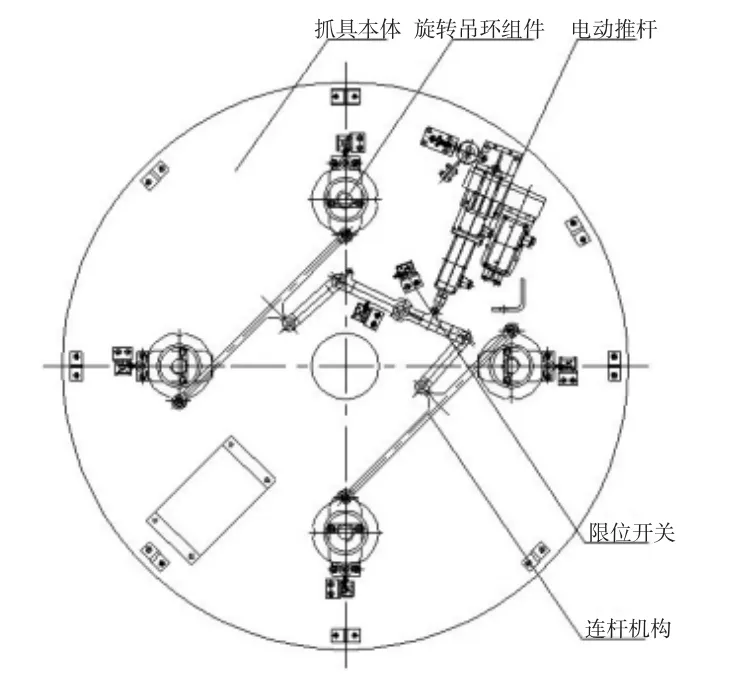
图1 自动抓具结构简图
用于该起重机的自动抓具主要包括抓具本体、连杆机构、旋转吊环组件、电动推杆和限位开关等[1]。抓具上的电气设备和电缆及仪控信号线进行辐射屏蔽,或采用耐辐照的产品,抓具的钢屏蔽厚度要求不少于150 mm,抓具上方的各类线缆和电气设备被钢屏蔽充分保护。自动抓具遵循失电安全的设计原则。机构布置如下:电动推杆推动四连杆机构的一点,四连杆机构连接4 个卡爪。
参考工程主机用自动抓具,设计制造一套模拟体,尺寸比例按照1∶1,主要模拟其外形、整体质量、驱动机构、手动打开机构等。研发完成的模拟体用于后续现场人员的技能培训,该模拟体是本文的研究对象。
1 机构仿真研究
通过多体动力学仿真分析软件ADAMS[2],对自动抓具模拟体机构进行动力学仿真,模拟机构在实际工况下的运动,计算电动推杆在工作过程中推压力的变化曲线。机构仿真模型示意图如图2 所示。
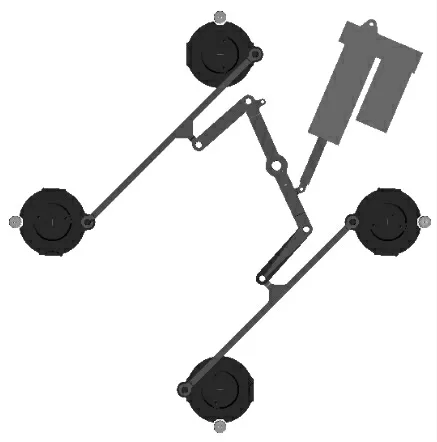
图2 机构仿真模型示意图
将模型中各运动部件分别定义为不同的连杆,将电动推杆本身设为滑动副(E),通过运动函数为其定义驱动(Motion)。将电动推杆与连杆装置设为圆柱副(D),连杆装置与吊钩旋转装置间设为圆柱副(A3、A4、B3、B4)吊钩旋转装置与吊具本体间设为圆柱副(A5、A6、B5、B6),且吊钩旋转装置与吊具本体间设置体对体的接触。两种方案均考虑铰接和接触位置的摩擦力。各运动副位置示意图如下页图3 所示。

图3 各运动副位置示意图
驱动电动推杆的运动函数也分为3 种情况讨论,以分析在不同速度曲线下电动推杆推压力的变化:
通过位移进行驱动:step(time,0,0,8,76.1)。
通过速度进行驱动:step(time,0,0,1,step(time,7,10.86,8,0))。
通 过 速 度 进 行 驱 动:step(time,0,0,0.5,step(time,7.5,10.15,8,0))。
对机构进行仿真计算,可以得到以下结果:
1)以位移进行驱动时,推压力变化如图4-1 所示,此时推压力的最大值为658 N;
2)以速度2 进行驱动时,推压力变化如图4-2 所示,此时推压力的最大值为662 N;
3)以速度3 进行驱动时,推压力变化如图4-3 所示,此时推压力的最大值为665 N。
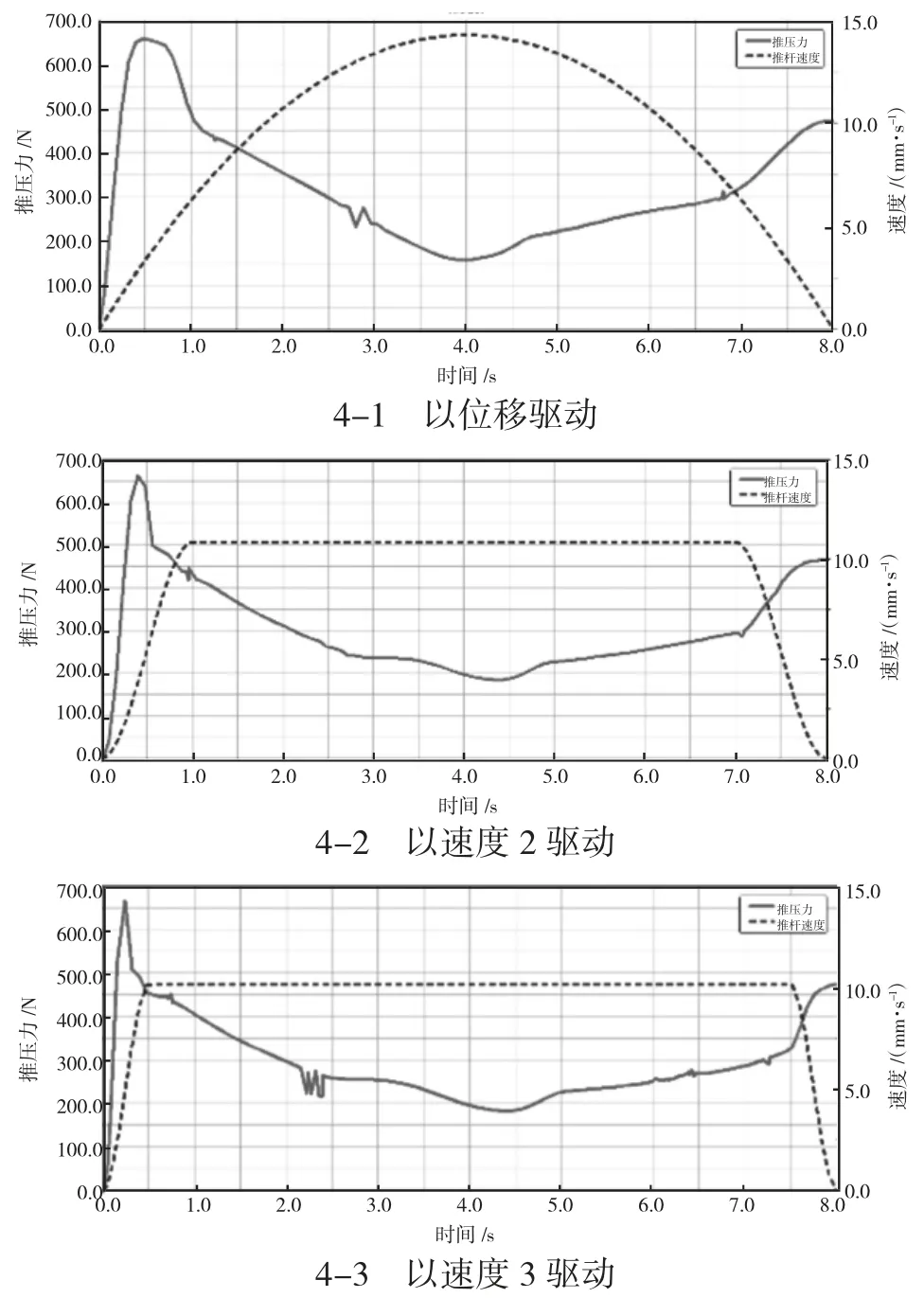
图4 电动推杆速度和推压力变化曲线
对上述仿真结果进行简单验证。此时,取消电动推杆上的主动驱动(Motion),对其施加大小为700 N的作用力,可以看到整个机构可以完整的完成一个工作循环,可以验证上述所求的推压力有效。
用不同的驱动方式进行推杆驱动,所得到的推压力变化趋势一致,最大值也非常接近。可以认为在正常的速度变化范围内,速度曲线对推杆的推压力影响较小。推压力的最大值均小于900 N,电动推杆速度均在8~15 mm/s 的范围之内。
2 电动推杆研究
2.1 电动推杆结构及工作原理
电动推杆由电动机、二级减速器、丝杆、推杆组件等组成。电动推杆利用电动机动力带动二级减速器,从而推动推杆的前后运动。本电动推杆采用水平安装方式,在减速器箱体盖及推杆端部分别设有安装孔,并将推杆端部设计为周向360°万向节,可根据现场安装条件调整角度,以便于安装。
当电动机通电时,电动机带动二级减速器,使得丝杠在齿轮的带动下运动,丝杆通过梯形螺纹推动推杆组件向前运动,当推杆运动到一定程度时,推杆组件会压动行程限位开关,使得推杆停止。当电动机通反向电时,电动机带动二级减速器,使得丝杠在齿轮的带动下运动,丝杆通过梯形螺纹推动推杆组件向后运动。当推杆运动到一定程度时,推杆组件会压动行程限位开关,使得推杆停止。当电动推杆在工作过程中推力大于极限值时,电动推杆会压动过载保护装置使得推杆安全停止。
2.2 电动推杆技术参数
某核电站起重机自动抓具采用电动推杆为动力,满足如下要求:
1)耐核辐射,控制设备剂量率为1.32×102rad/h,累积剂量为2×107rad;
2)耐腐蚀,主要外露材质为不锈钢;
3)采用耐辐照润滑;
4)采用免维护轴承。
因以上要求的特殊性,原主机电动推杆委托厂家专业定制。模拟体电动推杆用于培训操作,无上述要求限制,因此可选用接近或满足要求的标准电动推杆。两种推杆的参数对比见下页表1。
从表1 中对比可以看出,选用的标准电动推杆满足模拟体基本使用要求,质量比原电动推杆减轻31 kg,并且可大幅度降低成本。
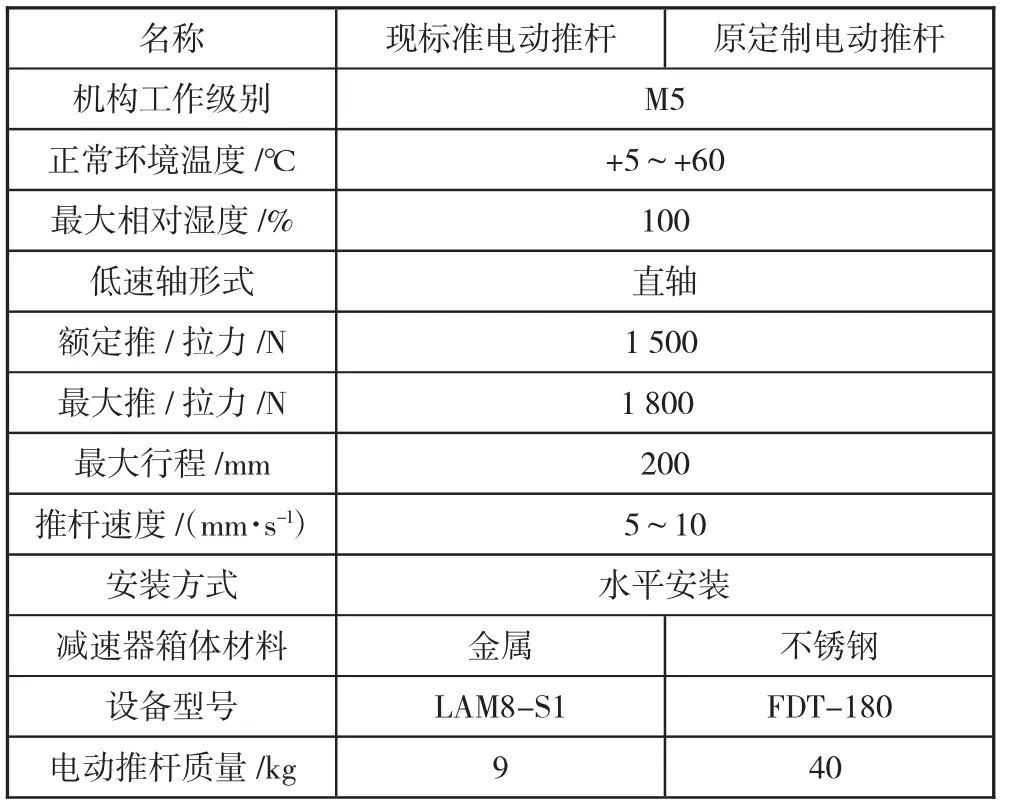
表1 模拟体与原设备用电动推杆参数对比
2.3 电动推杆配重研究
模拟体用电动推杆重量轻,会对自动抓具的模拟可靠性产生影响,需要加入配重结构,来保证模拟体重量和重心位置基本保持不变。电动推杆配重结构如下页图5 所示。

图5 电动推杆配重结构图
配重结构主体由两块钢板组成,放置于电动推杆两侧,钢板采用筋板加紧固件进行连接,并设置有橡胶块等保护电动推杆。合理布置钢板规格,整个配重结构质量为31 kg;合理布置紧固件相对钢板的固定位置,保持现模拟体电动推杆加配重后的重心位置和原主机电动推杆重心位置保持一致。
2.4 电动推杆与连杆机构接头研究
原电动推杆与连杆机构接口是模拟体用电动推杆接口是圆柱体上开圆孔。另外,模拟体电动推杆长度略小于原电动推杆。两种接口对比如图6 所示。
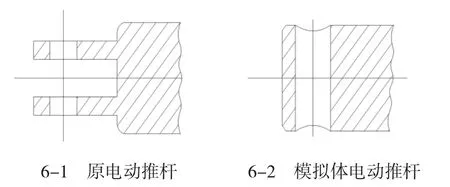
图6 电动推杆与连杆机构接口对比
为解决接口不一致的问题,增加连接件用以完成不同接口的转换。连接件连接连杆机构和模拟体电动推杆,与连杆机构连接部分采用和原电动推杆相似的接口形式。连接件和模拟体电动推杆连接在一起的两端长度和原电动推杆长度相同,因此保证了模拟体和原设备各部件之间连接的一致性。图7 为电动推杆增加连接件示意图。
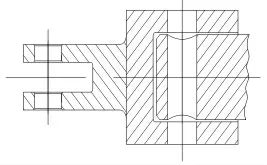
图7 电动推杆增加连接件示意图
2.5 新旧电动推杆对比
经上述研究,通过增设连接件,合理设计配重结构,将连接件、电动推杆、配种结构结合在一起,在接口型式、长度尺寸、质量、重心位置等方面,实现了模拟体电动推杆与原主机电动推杆保持一致,具体为:与连杆机构连接接口均为扁平状接口;初始位置电动推杆长度尺寸均为485 mm;质量均为40 kg;重心均位于推杆套和电动机中间位置。原电动推杆和现电动推杆外形如图8 所示。
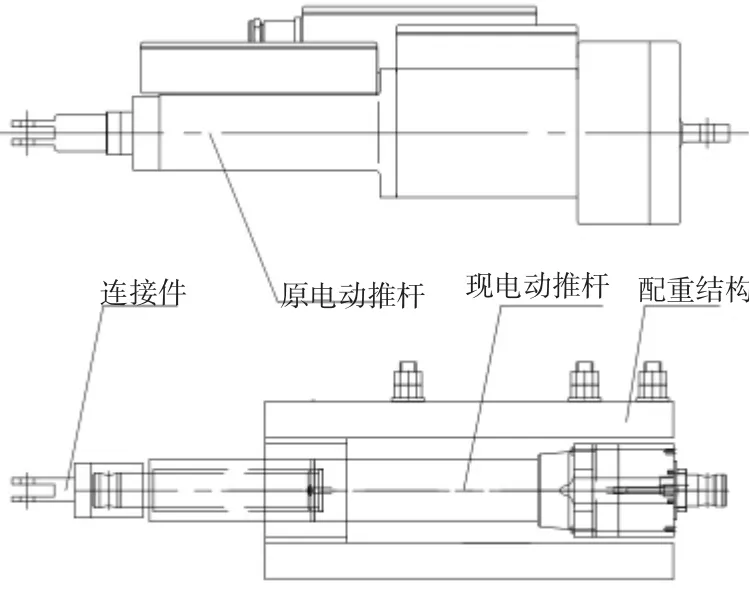
图8 新旧电动推杆外形
3 限位开关研究
主机自动抓具采用行程限位开关,在电动推杆初始行程位置和结束行程位置触发。在模拟体自动抓具设计过程中,为了进一步节约成本及采购周期考虑,采用机械式限位挡块替代电气式行程限位开关。图9是原限位开关和机械式限位挡块对比图形。
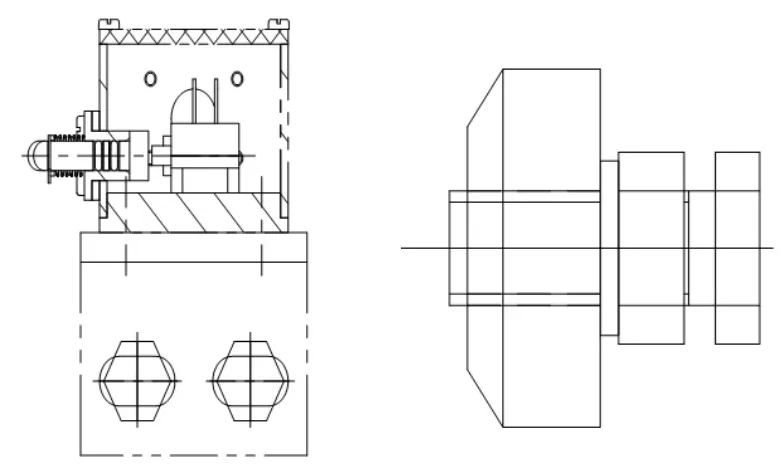
图9 原限位开关和机械式限位挡块
4 结语
本文针对某核电站起重机自动抓具模拟体进行研究,通过采用标准电动推杆、设计连接件和配重结构、设计机械式限位挡块的措施,满足了模拟体1∶1尺寸比例的要求。本文的研究工作在满足模拟体使用功能的基础上,显著降低了产品成本,缩短了生产周期。
