基于自适应云模型的平衡车控制系统研究
2018-07-11姚炜
姚 炜
(江苏联合职业技术学院无锡机电分院 江苏无锡 214028)
平衡车系统是一种具有左右两轮且能自动保持平衡的类倒立摆系统,具有多变量、非线性及强耦合等不稳定系统所具有的特性。
近年来,相关研究人员已对平衡车做了深入的研究,文献[1]将自抗扰控制技术运用到两轮自平衡车运动平衡控制中,使平衡车的稳定性有了很大的提高。文献[2]在Matlab环境中设计了基于PD控制算法的两轮车直立控制器,虽然仿真结果显示所设计控制算法的合理性和设计电路的正确性,但并没有对平衡车的稳定性做出改善。文献[3]设计了一种采用卡尔曼滤波的两轮自平衡车姿态检测控制算法的控制器,其同样未对平衡车行驶过程中的稳定性做出改善。文献[4]提出了电机的直接转矩控制法,与传统使用电压开环控制及速度反馈控制的平衡车相比,该文设计的平衡车具有性价比高、响应速度快、控制平稳等优点。文献[5]以多体系统动力学理论为基础,建立了某微型汽车前悬架的多体系统分析模型,对原悬架系统进行了优化。文献[6]为了正确设计汽车转向轮定位参数,分析了转向轮各定位参数的作用,提出了各定位参数使转向轮形成自动回正力矩和使转向盘需要转向力的计算方法及公式。文献[7]用一种新的方法推导了车轮转角与车身抬高量的关系,提高了车辆行驶的稳定性。本文首先采用拉格朗日方法建立平衡车动力学模型,从平衡车动力学模型推导出转速与平衡车其他物理量之间的关系,然后针对车轮转速设计自适应云模型控制系统,最后搭建了基于自适应云模型控制算法平衡车实验平台。实验结果表明,提出的平衡车自适应云模型控制算法精度高、性能稳定。
1 平衡车的动力学模型
平衡车系统结构复杂,其具有多变量、非线性及强耦合等不稳定系统的特性,难以建立准确的模型。本文为了简化分析难度,不计风阻等环境因素的影响,其物理模型可以表示为图1。该物理模型中各个物理量的含义如表1。该物理模型以平衡车两轮的中心点为原点,以两个轮轴的重合线为x轴,以平衡车直线前进的方向为y轴,与水平面垂直的方向为z轴,在空间中,该物理模型可以前后直线运动、左右转弯、前后摆动。此外,结合拉格朗日动力学模型与该物理模型得出平衡车的动力学模型。
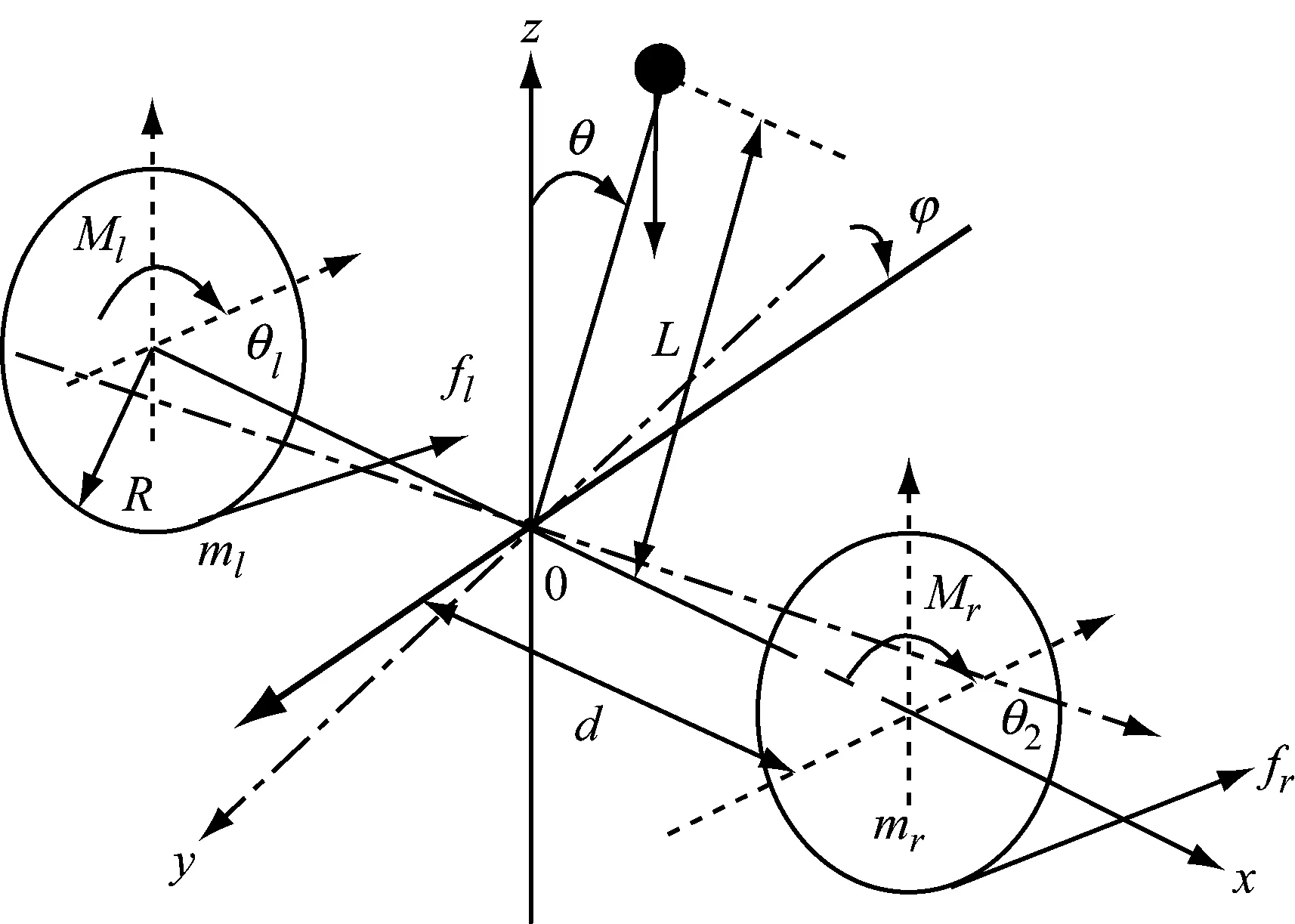
图1 平衡车受力分析
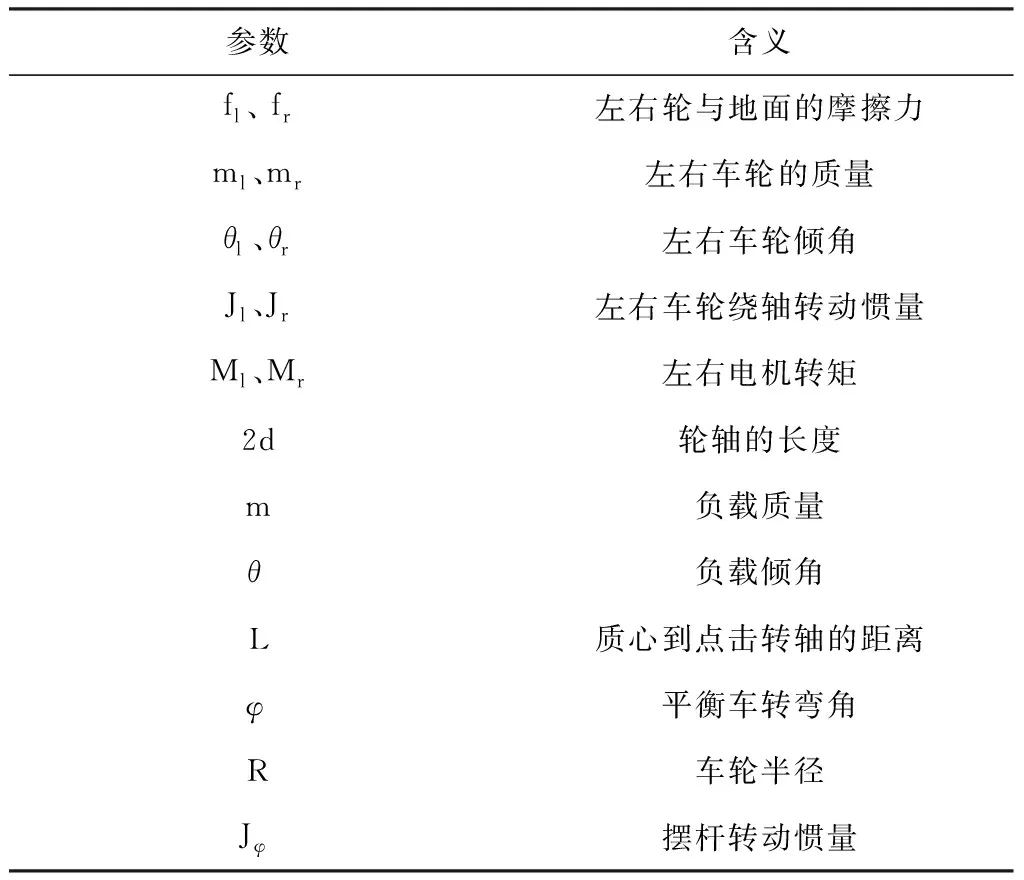
参数含义fl、 fr左右轮与地面的摩擦力ml、mr左右车轮的质量θl、θr左右车轮倾角Jl、Jr左右车轮绕轴转动惯量Ml、Mr左右电机转矩2d轮轴的长度m负载质量θ负载倾角L质心到点击转轴的距离φ平衡车转弯角R车轮半径Jφ摆杆转动惯量
拉格朗日方程如下:
(1)
式(1)中,左右车轮倾角为θl、θr,T是平衡车系统的总动能,Qi是平衡车系统的广义力,qi是系统的广义坐标。文中取平衡车前后杆摆角为θ,在广义坐标下,可以得到如下系统转速方程:

(2)
(3)
(4)
从以上建立的平衡车模型可知,由于系统模型参数的变化,控制器需要实时调整车速使系统保持恒速稳定运行。
2 平衡车的自适应云模型控制
2.1 自适应云模型概念
云模型理论用定量和定性的概念表示同一特征,可以通过特征的云模型来反映出人们对物体认识的本质,云模型自适应算法的原理如图2。在图2中,偏差变量控制块主要是表示用期望值和实际值的偏差来确定输出量所需要的修正值;控制量校正块的作用则是将需要校正的输出相应量转变为需校正的控制量;规则修改块的作用是通过修改控制规则来实现校正量。它们的工作思路是:通过对反映输出量大小的误差信号的测量,获得需要校正的输出相应量的信息,然后将其转换成对控制输入的校正量,最后通过修改控制规则实施校正量。

图2 自适应云模型结构图
2.2 平衡车自适应云模型控制器设计
自适应云模型控制器如图3所示。
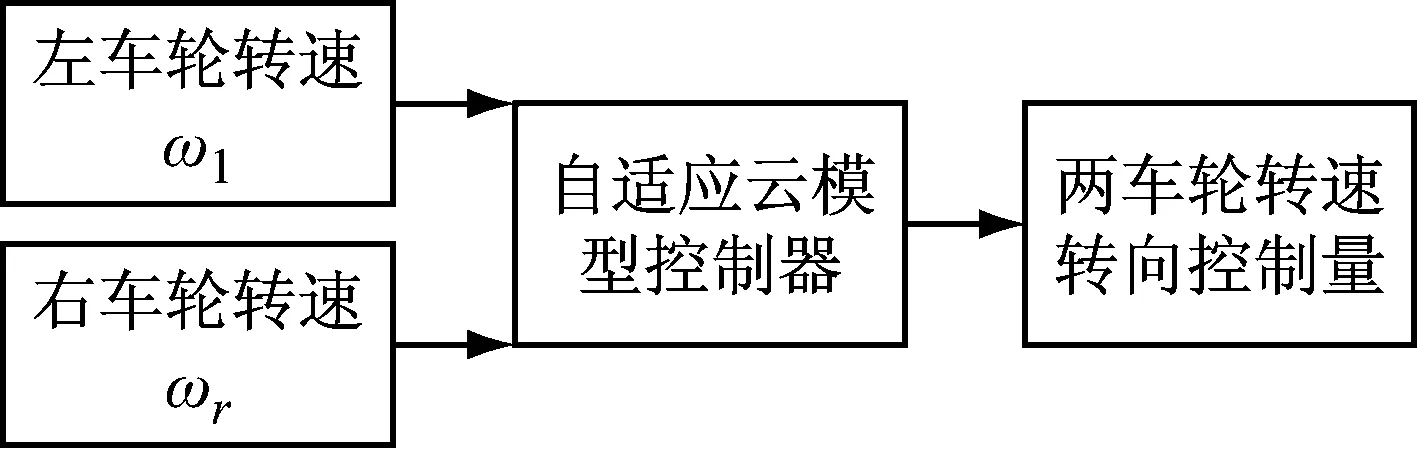
图3 自适应云模型控制器
云模型控制器的设计步骤如下:
步骤1:令i=1,j=1,k=1;
步骤2:生成前件云滴(x,μi);
步骤3:生成后件云滴(yik,μi);
步骤4:计算单规则映射输出值:

(5)
步骤5:i=i+1;
步骤6:当i=N时,执行步骤7;否则返回步骤2(其中N为规则个数,本映射器中N=5);
步骤7:计算云模型映射器总输出值:
(6)
云模型的控制规则如下:
规则1:IF转速正误差较大,THEN正控制量较大。
规则2:IF转速正误差较小,THEN正控制量较小。
规则3:IF转速误差为零,THEN控制量为零。
规则4:IF转速负误差较小,THEN负控制量较小。
规则5:IF转速负误差较大,THEN负控制量较大。
自适应云模型的控制规则前件云与后件云的参数如表2所示。
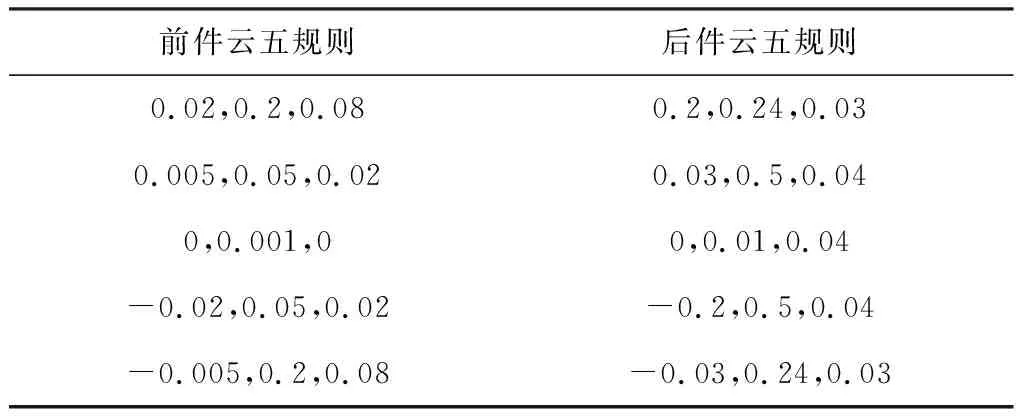
表2 前件云与后件云参数
自适应云模型的控制规则前件云与后件云的定性表示如图4和图5所示。
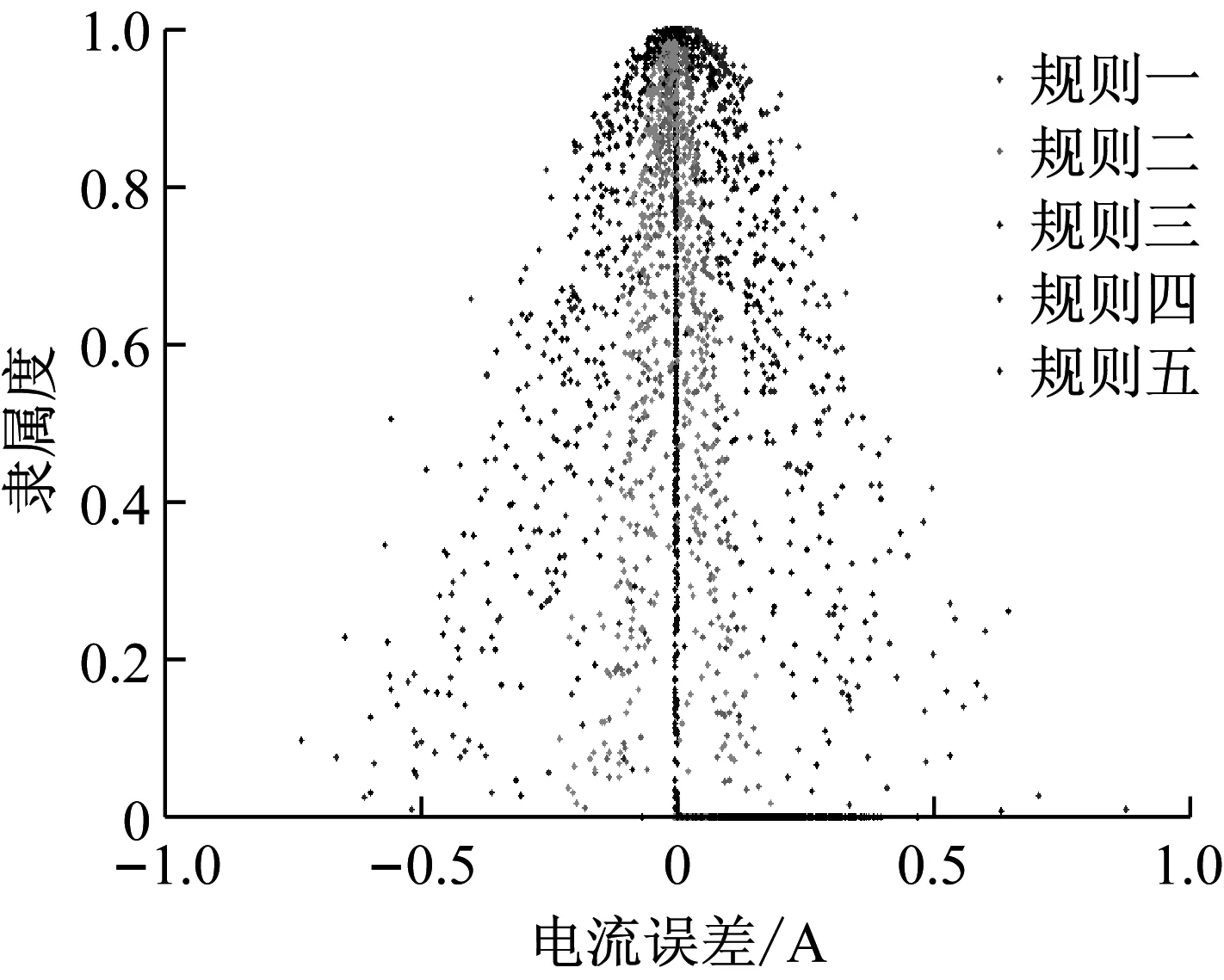
图4 前件云规则定性表示
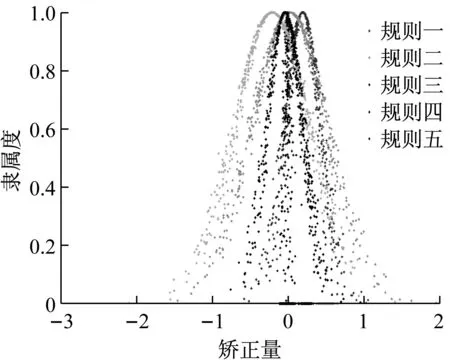
图5 后件云规则定性表示
模型映射器如图6所示。根据步骤7中的公式6计算得出控制量输出总值。
3 实验分析
实验中选取两种控制系统,即传统PID控制系统和基于自适应云模型控制系统进行实验对比。图7和图8分别为传统PID控制下和自适应云模型控制下的平衡车转速。实验中设定的转速为1 000 rpm,从图中可以看出传统PID控制系统的转速超调量为6%,而自适应云模型控制下的转速超调量为3%,且自适应云模型的调节时间明显低于传统PID。从而证明本文所设计的基于自适应云模型的平衡车控制系统的性能优越,控制精度高。

图6 云模型映射器
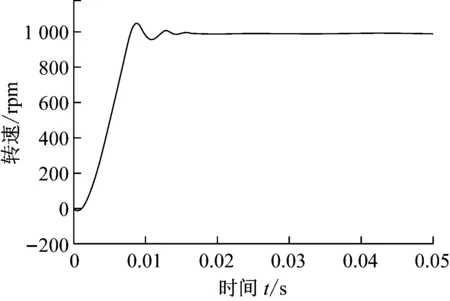
图7 传统PID下转速
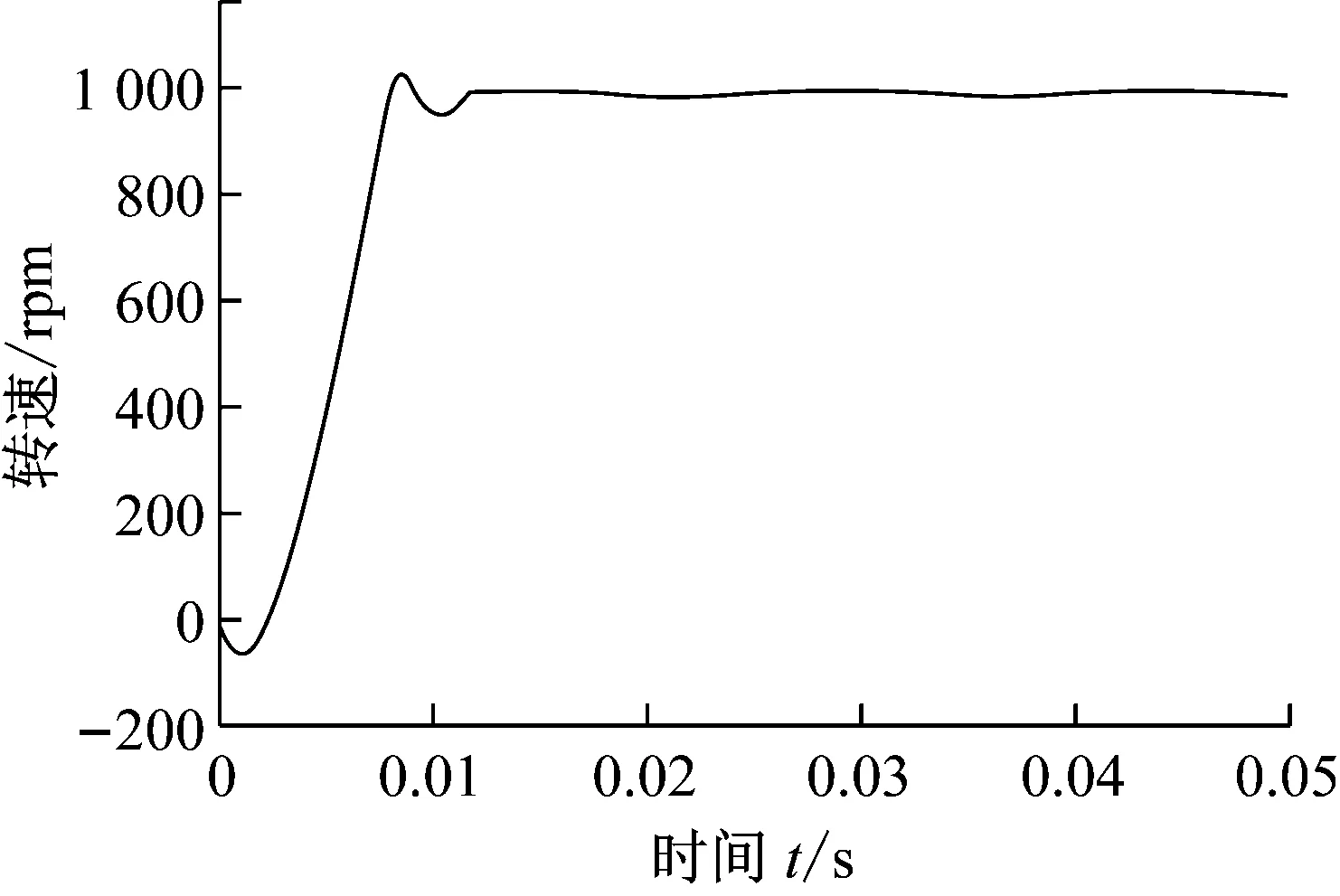
图8 自适应云模型下转速
4 结论
1)为了提高平衡车转速控制的精度,设计了一种基于自适应云模型的平衡车控制系统,并制订了云模型控制规则。
2)搭建平衡车实验平台,将本文设计的基于自适应云模型的平衡车控制系统与传统PID控制系统进对比试验,实验结果显示本文所设计的系统控制性能更为优越,控制精度高。
