一种新型的三轮全向移动攀爬机器人设计
2018-07-09王江华
王江华, 赵 燕
(1.华北科技学院 电子信息工程学院,河北 三河 065201;2.燕京理工学院 信息科学与技术学院,河北 三河 065201)
0 引 言
随着科学技术的飞速发展,机器人产业不断更新,可以说机器人是人类进一步探索自然的工具。因为机器人具有长时间连续工作、适用环境能力强、工作效率高等众多优良特性,所以机器人替代或取代人类,完成某项工作已逐渐成为趋势[1]。本文通过构建一个模拟的工作环境,使机器人完成一系列的任务动作。从机器人停放点出发到达地面放置扇叶的位置,将扇叶拿起后按照地面的标志线自主移动行进,携带扇叶移动至需要攀爬的风机立柱下方,之后通过两主一从方式攀爬至立柱顶端将扇叶安装至立柱顶端的风机上。
1 总体方案
机器人在地面移动部分采用三轮全向驱动方式[2-3];攀爬部分采用两主一从的电动机分布驱动方式;机器人的高空作业安装扇叶部分采用机械手完成。整个全向移动机器人的控制由电控与气控两部分组成。直流电动机的驱动部分采用桥式驱动电路,从而实现对电动机转速的平滑调节。气动驱动部分则通过机身携带的4个2 L的塑料瓶储存气源[4],为整机的气动控制提供能量。路径的自主识别部分采用可见光反射式检测方式。
2 驱动方案的选择
按照本设计的任务要求,本设计需要具有地面移动能力、立柱攀爬能力、扇叶的抓取与安装能力。故方案设计大体分为地面移动方式的设计、攀爬方式的设计、风扇的抓取与安装方式的设计。
2.1 地面移动方式的选择
(1) 轮式移动机器人。轮式移动机械结构的机器人具有比较高的移动速度。但是相对来说,这种移动机构也有它的缺点,就是对于路面的条件要求过高,在比较柔软的地面很难保证其正常行进[5]。
(2) 履带式移动机器人。履带式机器人经常工作在野外环境中,常用来应对复杂的地理环境。机器人的主体是两条可以产生形变的履带,主要依靠两个电动机驱动来进行前进和后退。履带式机器人的机动性能好,可以在原地360°旋转来完成不同方向的行进,不易打滑,但是履带式机器人的行进速度过于缓慢。
考虑到本设计应用在特定环境下地面条件较好,所以轮式机器人比较适合。为了使轮式机器人在转弯上面更加灵活,本设计采用了3个全向轮相差120°的底盘安装方式。
2.2 攀爬方式的选择
攀爬物体的结构方式无非以下两种:①利用机械结构变形抓住或者锁住被攀爬物体;②利用磁力、黏性或者抽真空等方式让机器人吸附在被攀爬物体的表面。
(1) 采用两个夹手利用机械形变交替夹住支柱。这种方式的优点是可以大幅度加大攀爬机器人携带物体的能力。但是机械结构非常复杂,攀爬速度相对较慢,攀爬效率很难保证。
(2) 采用贴合立柱的橡胶轮从立柱两侧将立柱夹紧,并通过橡胶的转动提供上升动力[6]。采用这种方式进行攀爬,既可以保证攀爬的效率,又可以提高机器人的载重能力。但是采用这种方式需要解决一个问题:就是需要保证橡胶轮与立柱之间具有足够的摩擦力[7]。
经过实验与分析得出:方式(2)的可行性较高。如图1所示方式,平时行进状态,动力轮1、2处于水平右侧,当行动至需要攀爬的立柱下方时,两个动力轮同时水平向左移动,与辅助轮共同将立柱锁紧,利用机器人自身的重力使动力轮与立柱充分接触增加摩擦力,动力轮1与动力轮2开始旋转产生上升力。
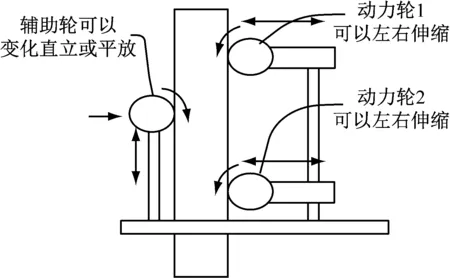
图1 结构示意图
2.3 风扇的抓取与安装方式
本设计的作业机械部分模拟地是一个特定作业完成测试,机器人的工作任务就是拿取与安装扇叶。按照设计目的在机器人的机身上安装了一个可以上下移动的Z轴平台,夹取风扇的机械手就安装在这个平台之上。风扇夹取装置采用电动机带动同步轮和同步带的方式作为X轴,在同步带的连接处固定了一对夹取扇叶的机械手。
3 控制系统
3.1 系统硬件设计
3.1.1核心控制部分
核心控制部分是整个机器人控制电路的主体部分,负责机器人的所有控制任务。该系统以STM32F103为核心控制器[8],并将驱动部分、各种检测电路、检测接口、模式选择开关、OLED屏幕显示接口以及必要的调试硬件集成在了一起,系统控制框图如图2所示。
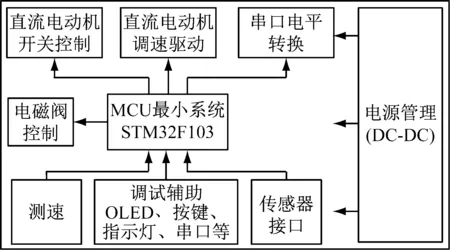
图2 系统控制框图
3.1.2传感器部分
传感器部分包括了机器人某些关节部分的限位开关、地面移动轮的速度采集和地面移动部分的路线跟踪电路。
(1) 限位开关。用于控制舵机和电子调速器等,实现攀爬过程中的位置检测、作业机械部分的动作检测等。
(2) 测速及鉴向。本设计的3个地面动力轮使用的是直流电动机,且每个电动机均安装了光电编码器。光电编码器输出两个相位互差90°的脉冲波形,通过这个关系能够判断电动机的正反转。
(3) 地面线路跟踪。地面线路跟踪采用可见光反射式检测方式,利用地面不同颜色所反射光的不同原理来实现。
3.1.3遥控器部分
为了方便灵活地控制机器人移动,采用摇杆电位器作为控制量的输入方式,主要由两个电位器组成,每个电位器分别检测摇杆在X和Y轴方向的偏移量,通过AD转化就可实现线性控制量的输入。以RS-485来完成手持遥控器与全向移动机器人的数据信息传递与控制[9]。
3.2 系统软件设计
3.2.1核心控制单元
在核心控制单元的程序设计过程中,首先需要搭建串口、PWM、AD转换、脉冲输入捕捉、开关量检测、开关量输入输出等驱动层的程序模块,然后按照各部分功能选择相应算法,完成直流电动机的闭环控制、机器人各部分的协调控制、地面自动循迹等控制任务,以及与人机交互部分的通信任务。
3.2.2攀爬机器人地面运动模型建立
在机器人的相对坐标中,以全向移动机器人中心为参考点,vx、vy分别为机器人坐标系速度的分解;v1、v2、v3为3个轮子的切向速度,则机器人坐标和参考坐标系的转换关系为[10]:
(1)
由式(1)可得,机器人与参考坐标之间对应的转换矩阵为:
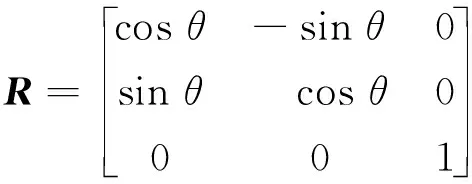
(2)
由上式可得,参考坐标与机器人之间对应的转换矩阵为:
(3)
图3是移动机器人的地面运动学模型,移动机器人的参考坐标系为X-Y,机器人的坐标系为Xe-Ye[11-12]。机器人底盘每个轮子的轴心到机器人的中心均为l,轮子上的箭头代表轮子转动产生的切向速度v,当轮子1和轮子2偏离机器人坐标系Ye轴方向δ角度时,轮子3恰好和其成90°,机器人坐标系Xe轴正方向和参考坐标系X轴正方向形成的夹角为θ。由此可知,3个轮子产生的速度与参考坐标系Y轴形成的3个夹角分别为:轮子1为δ+θ;轮子2为δ-θ;轮子3为90°-θ。通过分析得出该机器人的运动方程为:

图3 地面运动学模型
(4)
用矩阵表示为:
(5)
从整体结构考虑,一般取δ=30°,可得:
(6)
式中
(7)
4 仿真实践与实物测试
攀爬机器人虽然通过两主一从的方式进行攀爬柱面,但是,由于机器人向上攀爬的过程中自身左右质量不能达到绝对的均衡,所以会产生自身的旋转,从而导致攀爬路径产生一定的偏差。
机器人自旋会产生两个旋转角度,一个为自旋角度,即机器人所在位置与中心线和圆心所形成的角度;另一个为自旋偏移角度,即机器人所在位置与中心线和底部中点所形成的角度。攀爬测试数据如表1所示。
将上述数据经过Matlab仿真可以看出数据离散分布情况[13-15]。自旋偏移角度仿真结果如图4所示,自旋角度仿真结果如图5所示。
由实验结果可知,高度为3 m,半径为5.5 cm的柱面,攀爬机器人轨迹自旋角度的平均值为
方差为
攀爬机器人轨迹的自旋偏移角度的平均值为
方差为
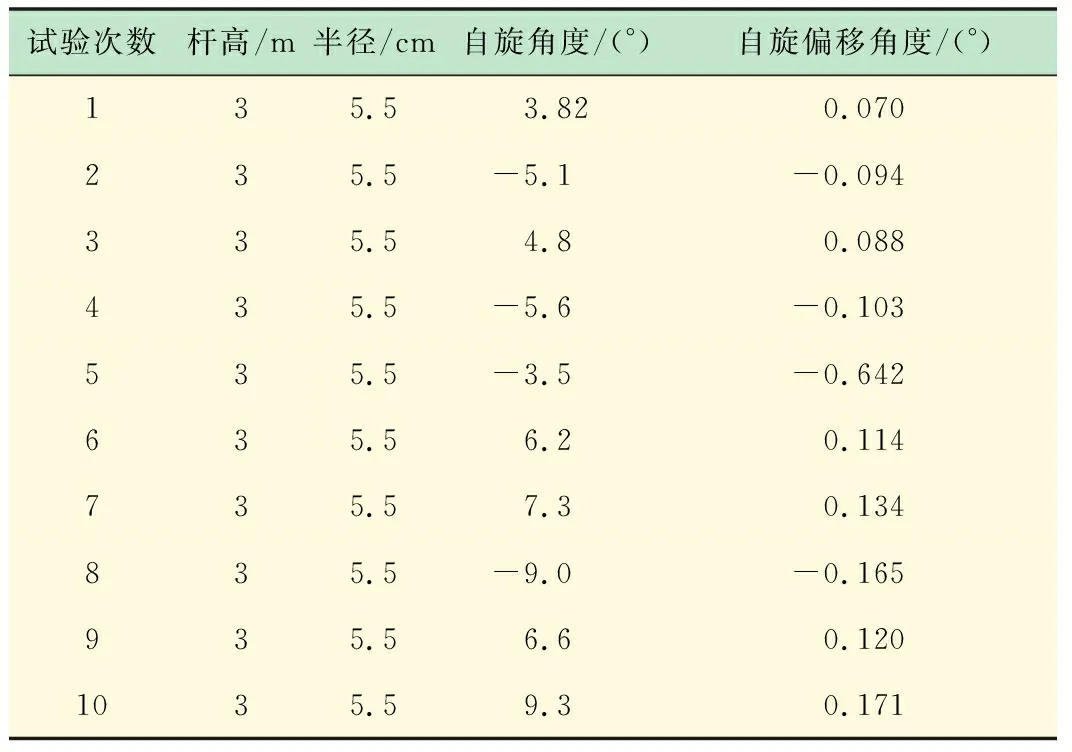
表1 攀爬测试数据表
注:负自旋角度表示向左偏移,正自旋角度表示向右偏移;负自旋偏移角度表示向左偏移,正自旋偏移角度表示向右偏移。

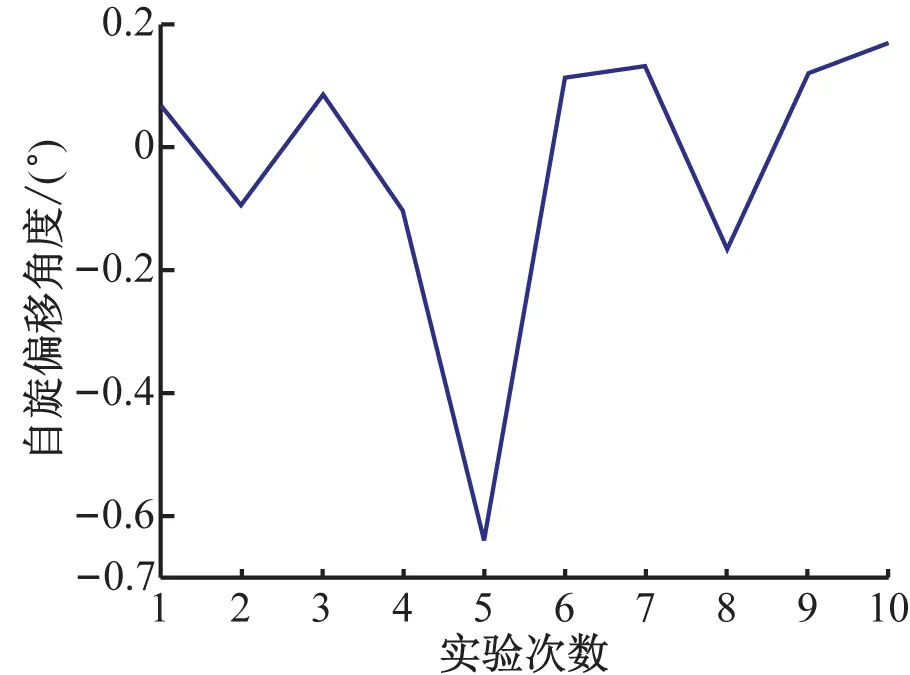
图4 自旋偏移角度仿真结果
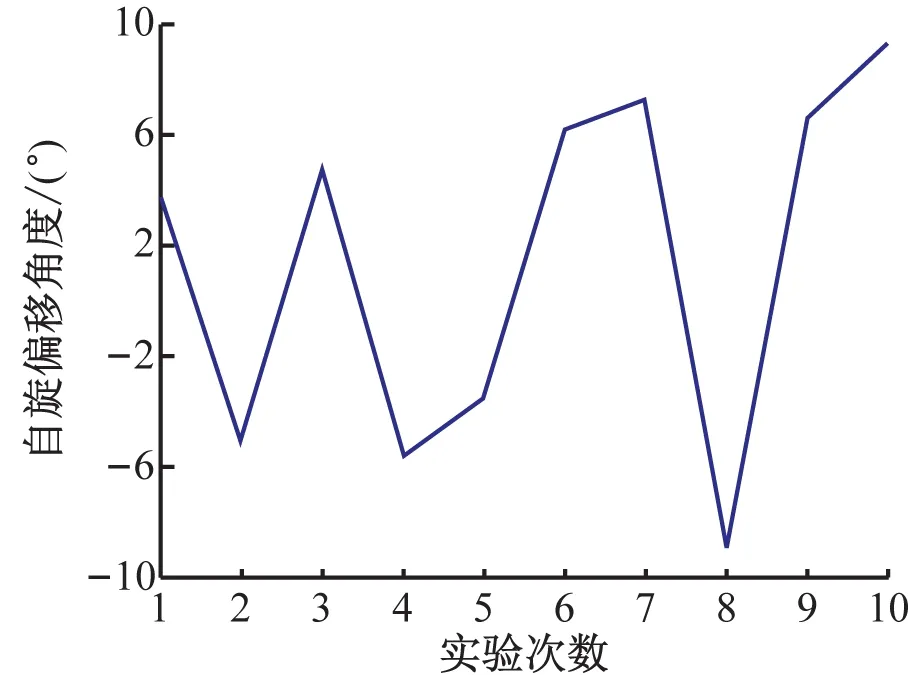
图5 自旋角度仿真结果
以下是攀爬机器人实物测试环节,攀爬实验如图6所示。实验结果很好地说明了机器人攀爬控制模型的误差在允许误差之内,满足实际要求。
5 结 论
本文针对攀爬机器人的具体特性从机械设计、电子硬件设计、实际仿真效果等方面进行了具体的分析设计,并制作出实物样机。经过研究与设计分析,得出以下结论:
(1) 分析了攀爬机器人的工作特点,并进行了攀爬方式的受力分析,验证了“两主一从气动型”攀爬机构的可行性和高效性。
(2) 对三轮全向移动进行了建模分析,推导出三轮运动方程,并成功应用到实物测试场合中,运动控制精度高,实物运行良好。
(3) 设计出实物测试模型,制作了整个系统的机械结构、运动控制系统,并进行了多次的全向移动和攀爬测试,运行平稳,攀爬效率较高,完全满足实际工作场合的应用。
参考文献(References):
[1] 朱连勇,韩铁雷,吕广占,等.电力架空线牵引用机器人[J].辽宁工程技术大学学报(自然科学版),2015,34(2):249-252.
[2] 姚冬冬,闵华松.三轮全向移动机器人的研究与设计[J].计算机工程与设计,2013,34(6):2163-2169.
[3] 吴永海.全方位移动机器人运动控制及规划[D].杭州:浙江大学,2011.
[4] 刘守生,吴 珩,王雷刚.等.气动控制单元支架背压成形工艺研究及数值模拟分析[J].精密成形工程,2016,8(4):28-32.
[5] 石 宁,黄 勇,李晓豁.4自由度串联式机械手轨迹运动学的分析[J].辽宁工程技术大学学报(自然科学版),2011,30(4):562-565.
[6] 王 巍,汪玉凤.基于PLC的气动机械手研究[J].辽宁工程技术大学学报(自然科学版),2005, 24(s1):135-136.
[7] 陈明森.爬杆机器人运动原理及动力学研究[D].武汉:武汉理工大学,2009.
[8] 刘火良.单片机与嵌入式:STM32库开发实战指南[M].北京:机械工业出版社,2013.
[9] 宋 跃,杨 雷,雷瑞庭,等.基于ARM9与LINUX的RS485总线的通信接口设计[J].仪表技术与传感器,2014(5):35-37.
[10] 谢志诚.三轮全向移动机器人运动控制研究[D].长沙:长沙理工大学,2010.
[11] 陈旭东,孔令成,刘尊朋.基于全向轮的机器人移动机构运动分析与控制设计[J].测控技术,2012,31(1):48-51,56.
[12] 杨春辉.三自由度平面并联微动机器人运动学模型及工作空间分析[J].机械传动,2010,34(1):16-18.
[13] 罗家佳,胡国清.基于MATLAB的机器人运动仿真研究[J].厦门大学学报(自然科学版),2005,44(5):640-644.
[14] 丁维力,李红平,马志敏.两级升降多自由度机械臂设计及运动学[J].辽宁工程技术大学学报(自然科学版),2014,33(5):642-646.
[15] 刘云龙,王瑞兰,刘丽君,等.基于Matlab仿真的自动控制原理实验教学改革[J].实验室研究与探索,2015,34(6):102-106.