基于光滑攻角剖面的高超声速滑翔飞行器下降段轨迹设计
2018-07-06李天任雷建长王宇航
李天任,雷建长,王宇航,周 华,黄 佩
0 引 言
近年来,国内外学者对高超声速飞行器再入轨迹优化与制导开展了大量研究:一类是传统的返回舱式低升阻比再入飞行器,常采用倾侧角反转的轨迹优化和制导方法;另一类是近年来发展的高升阻比滑翔飞行器,一般采用攻角、倾侧角作为控制变量,通过设计两者在再入过程中随时间、速度、高度的变化规律来满足过程、终端状态约束,同时达到某一性能指标最优。
目前,离线进行优化的伪谱法是较为成熟的再入体轨迹设计方法。伪谱法通过在整条轨迹的配点处离散,将再入动力学微分方程转化为代数方程,最后采用序列二次规划(Sequential Quadratic Programming,SQP)等方法求解非线性规划问题。其在单机上进行一次轨迹设计的计算时间较长,一般用于离线生成标称轨迹。
为了发挥高升阻比飞行器的在线机动能力,水尊师[1]和肖红[2]等人发展了基于航路点的局部预测校正制导方法,但其离线设计的航路点是固定的,削弱了飞行器轨迹的变更、再生成能力。基于Harpold[3]的航天飞机再入轨迹设计思路,周浩[4]、李强[5]、刘运鹏[6]等人采用常值、分段线性等攻角设计方案,用于轨迹的初步设计和在线预测。另一方面,胡锦川[7]的平稳滑翔轨迹以及张冉[8]均要求攻角曲线连续且可导,在使轨迹平稳的同时降低飞行器姿态控制器的设计要求。
下降段是再入飞行器进入大气层后的初始飞行阶段,也被称为引入段。为了在下降段轨迹的设计中简化控制量曲线的设计,同时增强控制量剖面的光滑度,易于与平衡滑翔段轨迹光滑对接,除了现有的常值、分段线性以及复合指数函数的剖面设计方案外,有必要引入新的函数形式。本文采用改进的复合三角函数,其具有幅值可调、波峰的位置和峰形可变、导数连续且光滑等优点,适合在控制量剖面设计中采用。
1 再入动力学模型
针对无动力再入飞行器,在位置系下建立动力学模型,O-XYZ为地心固连坐标系,将其绕Z轴正向旋转经度θ,再绕新的 Y轴旋转纬度φ得到位置坐标系O-xyz,如图1所示。

图1 三自由度运动参数示意Fig.1 3D Motion Parameters Diagram
采用圆球无旋地球假设,飞行器动力学方程[9]为
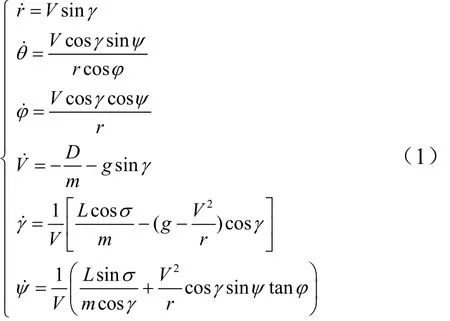
式中 r,θ,φ,V,γ,ψ分别为地心距、经度、纬度、速度、弹道倾角、航向角;g为重力加速度;m为飞行器质量;σ为倾侧角;L,D分别为升力和阻力,且,

式中 ρ为大气密度;S为参考面积; CL, CD分别为升力系数、阻力系数。
m,S,CL, CD均参考国外滑翔飞行器CAV-H,m=907 kg,S=0.4839 m2。对升力系数 CL和阻力系数 CD进行拟合,得到两者对攻角α的关系式[10]:

在再入飞行器初始下降段,常采用零倾侧角、大攻角拉起的方案,在飞行器状态参数满足一定条件时,切换到平衡滑翔阶段,随后采用平衡滑翔段的攻角、倾侧角剖面。本文采用的切换条件为

式中1K为弹道倾角的权系数;ε为一小量。
采用下降段零倾侧角、单波峰攻角剖面,平衡滑翔段的攻角剖面由拟平衡滑翔条件(Qusi Equilibrium Glide Condition,QEGC)推导得到。根据拟平衡滑翔条件:

根据当前状态已知的 V ,r,g,联立式(2)、式(3)、式(6),得到拟平衡滑翔攻角 αQEGC为

式中 A,B为式(3)中攻角的一阶项系数和常数项。
考虑到气动系数误差,在 αQEGC上反馈弹道倾角的误差项 Δ α= K2(γ -γ*),其中,γ*为平衡滑翔段跟踪的弹道倾角, K2为反馈增益系数。由于本文研究的重点不是平衡滑翔段,可取γ*=-0.05°,从而有:

仿真结果表明,该方法能够在考虑各项偏差的情况下生成拟平衡滑翔轨迹。
2 下降段控制量剖面设计方法
2.1 下降段控制量设计思路
下降段攻角剖面常采用最大攻角、分段线性等攻角方案[3~5],在与滑翔段的对接处难以连续和可导,使轨迹平稳性降低、同时对姿态控制器的设计提出了很高要求。此外,大量的弹道仿真表明不连续或不可导的控制量剖面常导致对接点过载和热流峰值较大,难以满足过程约束。
考虑在再入下降段采用改进的复合三角函数,以增强对接点光滑性、降低最大过载和热流峰值。
2.2 单波峰攻角剖面生成方法
再入飞行器下降到一定高度,采用如下攻角时序:

式中mα为飞行器最大可用攻角。根据CAV-H的气动系数表[10],mα取20°,()Ft采用时间t的二次多项式函数:

通过调节多项式系数 ai(i = 0 ,1,2)来调整波长、波形和波峰位置,生成广义正弦函数簇,见图2。
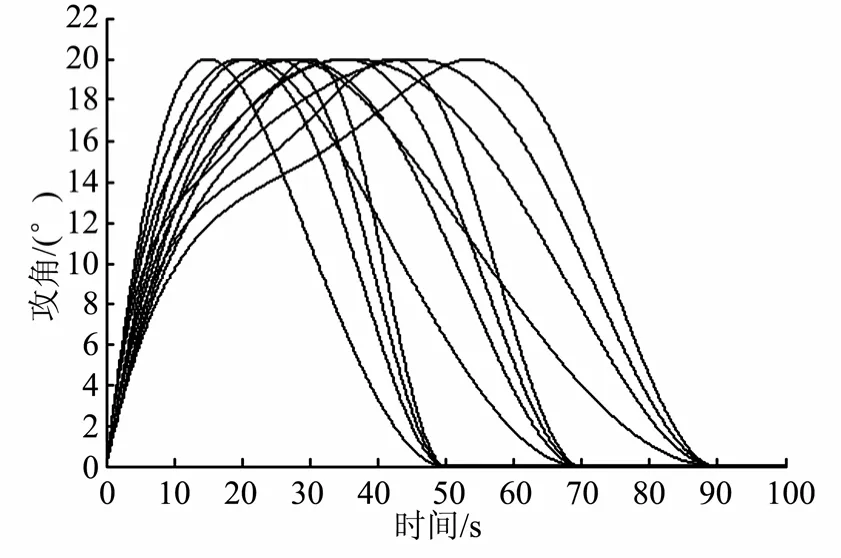
图2 不同波长、波峰位置的三角函数簇Fig.2 Trigonometric Functions with Diffierent Wavelength and Peak Position
2.3 搜索过渡点光滑的攻角剖面
为了增强下降段与平衡滑翔段过渡点处的攻角剖面光滑性,需要优化控制下降段攻角剖面形状的ai(i = 0 ,1,2)3个参数。本文采用改进的差分进化算法(Differential Evolution,DE)[11]进行参数寻优。目标函数见式(11)。

式中 j表示第j个积分区间,积分区间个数 N = tf/h ,tf,h为积分结束时间和积分步长。本文在Storn[11]的交叉操作之后增加拉回步骤,拉回不在解空间的新个体,以增强算法的鲁棒性。
3 数值仿真及分析
3.1 攻角剖面光滑性验证
CAV-H 再入点参数取 H=70 km,V=7.5 km/s,γ=-2°。下降段采用复合三角函数的攻角剖面,平衡滑翔段采用拟平衡滑翔攻角,以控制量光滑性为目标函数进行参数优化,得到如图3所示的攻角曲线。

图3 分段的攻角曲线Fig.3 Segment Curve of Angle of Attack
检查攻角剖面光滑性,见图4、图5。结果表明,攻角剖面在下降段前期与传统最大正攻角方案一致,而在过渡点附近与平衡滑翔段光滑衔接,攻角、攻角一阶导数均连续。攻角剖面一阶导数大小在过渡点附近不超过1 (°)/s,二阶导数大小在过渡点附近不超过2 (°)/s2,基本满足张冉[8]对攻角光滑性的要求。
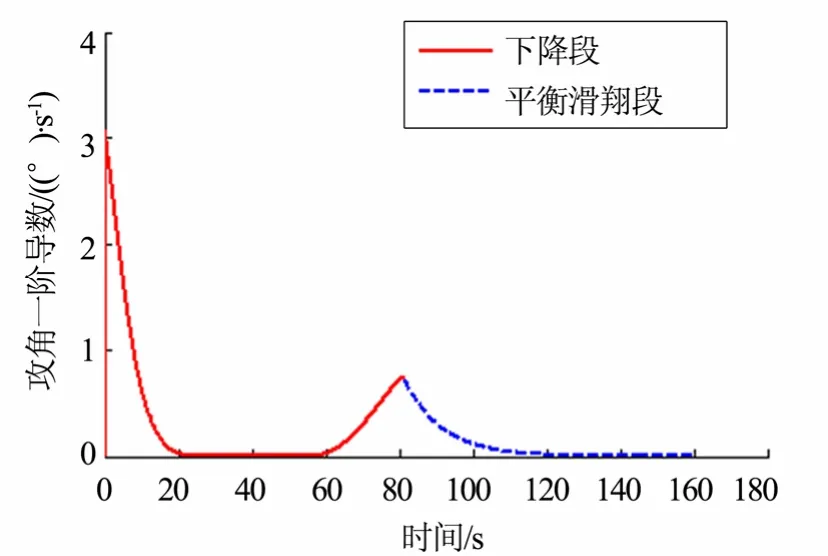
图4 攻角一阶导数Fig.4 First Derivative of Angle of Attack
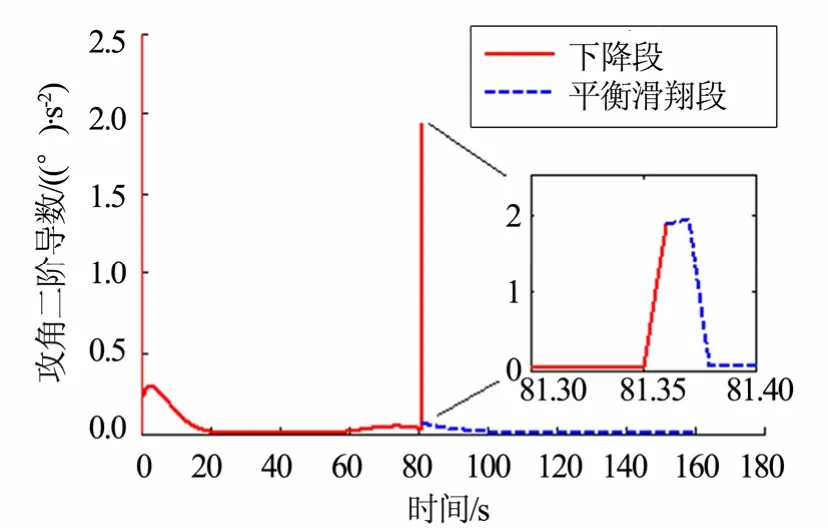
图5 攻角二阶导数Fig.5 Second Derivative of Angle of Attack
采用优化后的攻角剖面对CAV-H飞行器的再入下降段和平衡滑翔段进行数值仿真,见图6、图7。

图6 高度-时间曲线Fig.6 Hight-Time Curve
图7 弹道倾角及其导数曲线Fig.7 Curves ofγand its First Derivative
结果表明,再入飞行器能够平滑地进入拟平衡滑翔状态,弹道倾角由初始值过渡到零附近的过程连续且二阶可导,一阶导数绝对值不超过0.05 (°)/s。
3.2 不同攻角剖面方案的光滑性对比
采用式(11)中的目标函数f作为控制量曲线的光滑性能指标,对单波峰、分段线性、分段常值3种攻角剖面进行光滑性对比,见图8和表1。
图8 攻角曲线对比Fig.8 Comparision of Diffierent AOA Curves

表1 不同攻角剖面方案的光滑性对比Tab.1 Comparison of Smoothness with Diffierent AOA Profiles
结果表明,复合三角函数提高了攻角剖面的光滑性,使得曲线在分段过渡点处保持了较好的连续性。即使不对参数进行优化,单波峰攻角剖面相比另外两者有先天性的光滑性优势。此外,以上 3种剖面参数化方法的参数数量是相同的(均为3个),因此在轨迹优化时的复杂度基本一致。
3.3 不同攻角剖面方案的轨迹特性对比
为了检验单波峰攻角方案的优越性,将仿真结果与 Harpold[3]分段线性攻角方案、周浩[4]分段常值攻角方案得到的轨迹进行对比。采用胡锦川[7]提出的性能指标来评价轨迹平滑性:

式中 aε为纵向加速度,aε=V γ˙;tf为积分时间,tf=160 s。检查最大过载 nmax、峰值热流 Q˙max、过渡点动压q等轨迹特性,见表2。
表2 3种攻角剖面的轨迹特性对比Tab.2 Comparison of Trajectory Characteristics with Three Diffierent AOA Profiles
结果表明,经过优化的单波峰攻角剖面得到的轨迹最平滑,其他轨迹性能指标与Harpold[3]攻角方案差别不大,而分段常值攻角剖面的轨迹特性最差。分析可知,分段线性攻角方案在α-t和α-V剖面均连续但不可导,导致轨迹的平滑性在过渡点处下降,而分段常值攻角方案难以保证轨迹平滑,无法满足再入轨迹精细化设计的任务需求。
4 结束语
本文通过引入新的基函数,对原有控制量剖面进行了改进。新方法在保证参数数量不增加的情况下改善了控制量剖面的光滑性,基本满足胡锦川[7]、张冉[8]对控制量曲线的光滑性要求。通过差分进化算法对基函数进行参数优化,使得过渡点处的攻角曲线光滑性较好,提高了轨迹平滑性,下降段的热流、过载等环境也有一定程度改善。
复合三角函数具有在前、后端平缓变化的特点,适合在高速、大动压情况下控制飞行器的姿态角,可以在其他场景中加以进一步的应用。
[1] 水尊师, 周军, 葛致磊. 基于高斯伪谱方法的再入飞行器预测校正制导方法研究[J]. 宇航学报, 2011, 32(6): 1249-1255.
Shui Zunshi, Zhou Jun, Ge Zhi-lei. On-line predictor-corrector reentry guidance law based on gauss pseudospectral method[J]. Journal of Astronautics, 2011, 32(6): 1249-1255.
[2] 肖红, 王勇, 国海峰, 王征, 臧旭. 基于航路点的高超声速飞行器预测校正制导律设计[J]. 电光与控制, 2013, 20(10): 33-37.
Xiao Hong, Wang Yong, Guo Haifeng, Wang Zheng, Zang Xu. Design of waypoint based predictor-corrector guidance law for hypersonic vehicles[J]. Electronics Optics&Control, 2013, 20(10): 33-37.
[3] Harpold J C, Graves C A. Shuttle entry guidance[J]. The Journal of the Astronautical Sciences, 1979, 37(3): 239-268.
[4] 周浩, 陈万春, 殷兴良. 高超声速飞行器多段弹道优化设计[J]. 宇航学报, 2008, 29(4): 1205-1209.
Zhou Hao, Chen Wanchun, Yin Xingliang. Multi-phase trajectory optimization for a hypersonic vehicle[J]. Journal of Astronautics, 2008,29(4): 1205-1209.
[5] 李强. 高超声速滑翔飞行器再入制导控制技术研究[D]. 北京: 北京理工大学, 2015.
Li Qiang. Study on reentry guidance and control method for hypersonic glide vehicle[D]. Beijing: Beijing Institute of Technology, 2015.
[6] 刘运鹏, 李伶. 高超声速导弹高空再入减速段弹道优化设计[J]. 航天控制, 2010.11, 28(6): 3-6.
Liu Yunpeng, Li Ling. The optimization design for high-altitude reentry deceleration trajectory of hypersonic missile[J]. Aerospace Control, 2010,28(6): 3-6.
[7] 胡锦川, 陈万春. 高超声速飞行器平稳滑翔弹道设计方法[J]. 北京航空航天大学学报, 2015, 41(8): 1464-1475.
Hu Jinchuan, Chen Wanchun. Steady glide trajectory planning method for hypersonic reentry vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(8): 1464-1475.
[8] 张冉, 李惠峰. 基于平衡滑翔的升力再入攻角设计分析及应用[J].宇航学报, 2012, 33(11): 1557-1563.
Zhang Ran, Li Huifeng. Angle of attack operation zone analysis and application based on equilibrium glide condition for lifting reentry[J].Journal of Astronautics, 2012, 33(11): 1557-1563.
[9] Vinh N X, Busemann A, et al. Hypersonic and planetary entry flight mechanics[M]. Ann Arbor MI: Univ of Michigan Press, 1980.
[10] Zhang K, Chen W. Reentry vehicle constrained trajectory optimization[R]. AIAA-2011-2231, 2011.
[11] Storn R, Price K. Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces[J]. Journal of Global Optimization, 1997, 11 (4): 341-359.
