基于信号辨识的运载火箭实时减载控制技术
2018-07-05张卫东贺从园周静吴康
张卫东 贺从园 周静 吴康
1.上海航天技术研究院,上海 201109 2. 上海航天控制技术研究所,上海 201109
在高空风区域飞行时,运载火箭的箭体结构需承受气动载荷与控制力矩相互作用形成的弯矩,因此对其结构强度提出了较高要求。降低高空风对运载火箭的影响,减小运载火箭的气动载荷,保证其在高空区飞行的安全可靠是运载领域面临的难题。若能较好地利用减载控制技术减小运载火箭的气动载荷,设计时就可适当降低对火箭结构强度的要求,减轻运载火箭结构质量,提高运载能力,降低发射成本。
从工程的角度看,运载火箭减载控制方法大致有2种:1)事先补偿法:即根据历年高空风测量数据规律,确定条数不同俯仰、偏航程序角补偿量的标准弹道,根据高空风观测资料以及发射前的高空风预报,选定和装订相应标准弹道的发射诸元。该方法的补偿效果取决于对高空风规律判断的准确性;2)实时的补偿方法:在姿态控制方程中引入实时测量的攻角、侧滑角、速度、加速度等反馈,使火箭具有一种合成气流方向飞行的趋势,减少飞行中的气流攻角和侧滑角,降低气动载荷。
目前,实时减载所需的加速度信号绝大多数是由专用于减载的加速度表提供信号,通过选位确定合适的安装位置,保证尽可能真实地敏感到箭体的视加速度信号,此方法虽然达到了减载的目的,但是对减载加表的选位提出了较高要求,需要一套专用于敏感箭体视加速度信号的单机。文献[1]中简要分析了加速度反馈控制、自抗扰控制和攻角估算等不同方法下的减载控制效果,分析结论认为自抗扰控制技术不能区分干扰中由风产生的部分,因此虽然抗干扰能力较强,但减载效果并不好,攻角估算的精度不足等缺陷均不适合应用到工程中,加速度反馈控制仍是目前最常用的减载控制方法[1]。文献[2]介绍了国外的实时减载控制算法以及理论研究成果,分析了工程应用中以及学术研究上减载控制算法的优缺点,结论一致认为在工程应用中基于加速度信号反馈的实时减载控制算法是最为有效、可行的方法。随着科学技术的发展,捷联惯组的成本大幅降低,精度不断提高,已逐渐应用到新型运载火箭中。该文提出了采用捷联惯组的视加速度信号参与实时减载控制,对捷联惯组敏感到的视加速度信号进行特殊的处理,对速率陀螺测量的角速率信号进行辨识,间接获得箭体质心附近的视加速度信号,满足实时减载所需测量信号的要求。
1 测量方程的描述
为了降低箭体弹性变形对敏感元器件测量到信号的影响,通常将用于实时减载的加表测量装置安装于离质心较近且弹性变形较小的位置,如图1中的加表测量装置;而捷联惯组敏感到的箭体姿态和位置信息贯穿于运载火箭的整个飞行期间,因此只能安装在靠近箭体头部的位置,如图1所示。
图1 俯仰平面的箭体弹性变形
加表测量装置和捷联惯组的测量方程可以描述如下:
(1)
因此,在不考虑摆角加速度、晃动和弹性信息时,加表测量装置和捷联惯组的测量方程可以描述如下:
(2)
与加表测量装置敏感到的视加速度信号相比,捷联惯组安装位置离箭体质心较远,其受到箭体的弹性和绕心运动更严重,测量到的视加速度信号包含了较多的弹性信息,以及绕心运动产生的加速度信息 。对于弹性信息,在保证箭体刚体稳定性的前提下,可以通过低通滤波器滤掉绝大部分弹性信息;对于箭体绕心运动产生的加速度信息,可以通过角加速度信号辨识和捷联惯组位置投影到质心的方法解决。
2 箭体角加速度信号辨识
捷联惯组敏感到的视加速度信号可以简化如式(3):
(3)
对于实时减载控制所需的视加速度信号,最理想的是若能获得箭体质心位置的视加速度信号,结合式(3)可知,捷联惯组敏感到的视加速度信号减去绕心运动产生的加速度信号,即可获得质心位置的视加速度信号。获取绕心运动产生的线加速度信号的关键环节是辨识出角加速度信号,而辨识角加速度信号主要包含2个步骤:
1)选取速率陀螺测量装置测得的角速率信号作为辨识的输入信号,且进行低通滤波处理,最大限度地降低箭体弹性变形对角速率信息准确度的影响。运载火箭的角速率测量信号可以从速率陀螺测量装置或者捷联惯组中获得,但一般参与姿态控制的角速率信号均采用受弹性影响较小的速率陀螺测量装置测量的信号,速率陀螺在箭体上的安装位置如图2所示。
图2 速率陀螺安装位置示意图
在火箭姿态控制系统中,速率陀螺选位是很重要的一个环节,为了降低箭体弹性变形对速率陀螺测量信号的影响,通常将速率陀螺安装在振型斜率为0的附近,保证速率陀螺敏感到火箭的真实角速率信息,速率陀螺测量装置测量的角速率信号表达式如式(4):
(4)
在辨识过程中,可以对速率陀螺测量的角速率信号进行滤波处理,利用低通滤波器可以有效滤除高频弹性信息,尽可能的降低高频弹性的影响。
2)将滤波后的角速率信号作为辨识的输入信号,进而辨识出角速率信号的微分信号。控制系统中常使用微分器求取信号的微分信号,一般形式如下[3]:
(5)
(6)
式(6)中当τ值越小,系统输出信号的“噪声放大”现象就越严重,在实际工程中,对小信号或微弱信号来说无法应用这样的微分信号,为了避免传统的经典微分器存在的缺陷(如有噪声放大作用、在稳态时产生颤振等),采用了“快速无超调跟踪”的二阶非线性跟踪微分器,该微分器主要使用离散形式对信号进行处理,利用特殊的非线性函数实现对输入信号及其微分信号的光滑逼近,光滑逼近的程度可以通过设计速度因子参数和滤波因子参数来保证,目标是快速无超调的跟踪输入信号,同时给出良好的微分信号,一般采用如下二阶形式。
(7)
其中,u=fhan(x1(k)-v(k),x2(k),r,h0),u是采用离散形式的微分综合函数形式,其结构如下:
(8)
式中,v是输入指令信号,可调参数r是速度因子,决定跟踪速度,h为综合函数fhan的积分步长,也是整个微分器工作的积分步长,h在最速综合函数fhan中对噪声起滤波作用,又称为滤波因子。
非线性跟踪微分器的动态特性、跟踪精度与速度因子r和滤波因子h有较大的关联性,图3~4给出了不同滤波因子时的角速率信号跟踪特性。
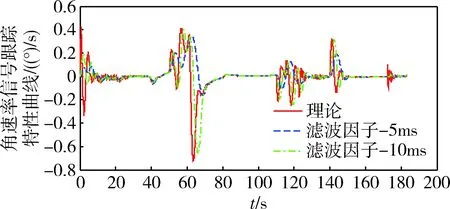
图3 姿态角速率跟踪特性曲线
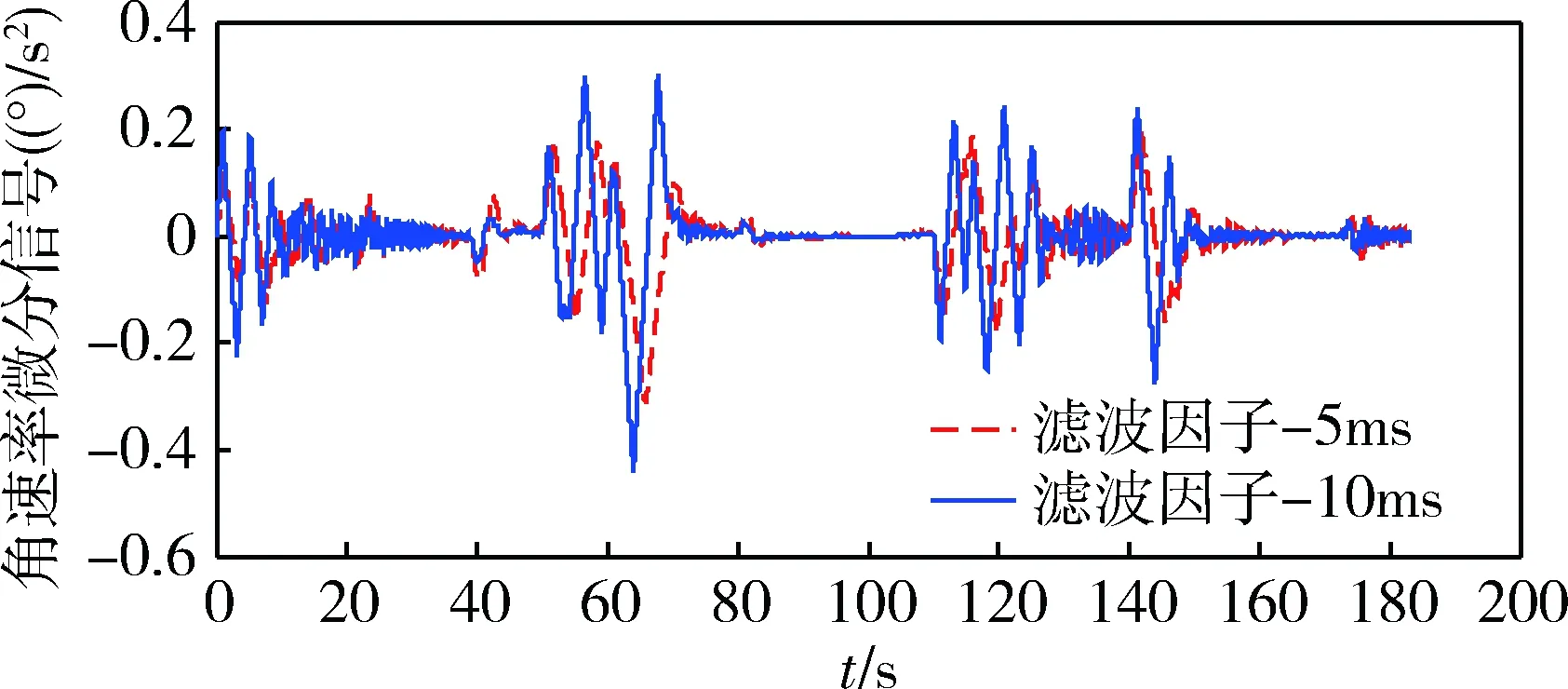
图4 姿态角速率微分信号曲线
由上述曲线可知,不同的滤波因子对角速率信号的微分结果有一定程度的影响,在参数设计过程中,可根据运载火箭的飞行特点选取合适的速度因子和滤波因子。
以某型号运载火箭为例,采用二阶非线性跟踪微分器分析了速率陀螺安装位置对辨识的角加速度准确度的影响,参与辨识的角速率信号的状态分为无弹性影响(振型斜率为0)、速率陀螺位置的振型影响和捷联惯组位置的振型影响3种状态,具体曲线如图5所示。
图5 辨识结果对比分析图
由图5可知,振型斜率为0与速率陀螺位置的辨识结果基本一致,捷联惯组位置的辨识结果存在明显的波动现象,主要因为捷联惯组的振型斜率较大,弹性变形对其测量结果影响较为明显,导致参与辨识的角速率信号含有大量的弹性信息,因此参与辨识角速率信号的选取很重要,应尽量选取振型斜率为0附近的速率陀螺测量结果参与辨识。
3 捷联惯组与质心间距离的辨识
捷联惯组与运载火箭质心之间的距离:
r=XG-XJL
(9)
式中,XJL为捷联惯组与火箭头部间的距离;XG为运载火箭质心与火箭头部间的距离。其中,XG因推进剂持续的消耗会产生变化。首先,可求取推进剂储箱容积、质心位置与液位高度的对应关系,如下所示:
V=V(h)
xT=xT(h)
(10)
只要有了t时刻的质量,就可求出容积值V,进而插值求出高度h、质心xT,而t时刻的质量可以根据秒耗量和火箭的总质量求得,如式(11)所示:
(11)

4 实时减载控制技术
通过上述辨识方法获取箭体质心位置的视加速度后,可将视加速度信号引入控制方程中:
(12)
加速度项引入姿态控制方程中不但可以减少气动载荷,同时适当地选择增益g2还可以使由风干扰引起的姿态角偏差和弹道倾角偏差在一定程度上有所减少。其中,g2的求取遵循了姿态角偏差最小控制的原则,所谓姿态角偏差最小控制就是通过对风干扰的补偿使风干扰对姿态角的影响最小,把式(2)代入(12)得
(13)
简化的箭体方程如式(14)所示
(14)
将式(13)代入(14)中得

(15)
由式(15)可得:若选
b2-g2(k3b2-k2b3)=0
(16)
此时g2的表达式如式(17):
(17)
基于捷联惯组的视加速度信号反馈控制框图如图6所示。
图6 实时减载控制算法框图
实时减载控制技术实现原理如图6所示,在传统的PID控制基础上增加了加速度信号反馈回路,通过对捷联惯组实时测量到的视加速度信号进行辨识和滤波处理,间接获得箭体质心附近的视加速度信号,作为加速度信号反馈回路的输入信号,参与实时减载控制,简化了系统的单机配置,降低了测量装置的安装位置要求,实现了大风区期间实时减小气动载荷的目的。
5 仿真结果与分析
为了验证捷联惯组视加速度反馈的实时减载控制算法的有效性,进行了数字仿真分析。在考核高空风影响时,工程上通常以切变风的形式叠加至气动静不稳定性b2最大时刻,对切变风一般采用较为严酷的三角波形式,如图7所示。
图7 切变风示意图
以某型号运载火箭的数据为例,为了验证速率陀螺安装位置处的振型斜率对辨识结果的影响,选取速率陀螺安装位置的振型斜率和惯组安装位置的振型斜率进行了分析,分别对速率陀螺测量和惯组陀螺测量的角速率信号进行辨识,2种不同位置辨识后投影至箭体质心位置的视加速度信号如图8所示。在大风区期间,火箭因受外界环境和箭体自身激励的影响,其结构弹性变形较明显,导致弹性信息对视加速度信号的准确度产生不利影响,此时采用了低频滤波器,使视加速度信号的带宽受限于低频段,保证只有刚体部分产生的视加速度参与控制,实时减载作用时间为50~70s,其余时间置0,不同位置的滤波后的视加速度信号如图9所示,其中图9包含了减载通道的增益系数。
图8 横向视加速度曲线
图9 滤波后横向视加速度曲线
由上述曲线得知,惯组位置的弹性信息幅值偏大,但在考虑刚体频段的视加速度信息参与控制后,滤波后的横向视加速度信号基本一致,大量的弹性信息已经滤掉,对减载控制的影响较小,速率陀螺安装位置和惯组陀螺位置速率信号辨识后的减载控制效果如下图所示。
图10 合成攻角曲线
图11 偏航姿态角偏差曲线
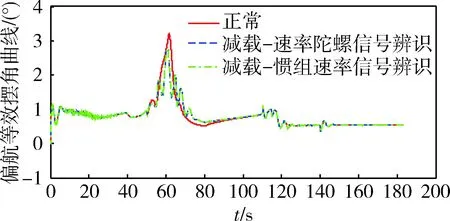
图12 偏航等效摆角曲线
图(10)~(12)为采用捷联惯组的视加速度信号参与实时减载控制的控制效果,从图(10)可以看出,运载火箭在大风区期间的气动载荷得到一定程度的减小,减小幅度约为15%,减轻了火箭结构载荷的压力,提高了火箭飞行的安全性;图(11)~(12)为运载火箭姿态角偏差信息与发动机摆角信息,通过分析发现,选择合适的g2系数可以减小姿态角偏差和发动机的最大摆角,降低了发动机摆角在大风区出现限幅的风险,保证了飞行的稳定性。
6 结论
利用捷联惯组测量的视加速度信号,通过在线辨识估计和弹性滤波的方法,解决了捷联惯组中视加速度信号包含大量弹性信息干扰和绕心运动产生的加速度信号干扰的问题,获得了箭体质心附近的视加速度信号,并将此信号作为实时减载所需的信号源,实现了大风区实时减载目的。通过理论分析和数值方法证明,该方法简化了运载火箭控制系统单机的配置,不需要额外配置供实时减载所需的加速度测量单机,控制策略简单,易于工程实现。
参 考 文 献
[1] 宋征宇.运载火箭飞行减载控制技术[J]. 航天控制, 2013, 31(5): 3-7. (Song Zhengyu.Load Control Technology in Launch Vehicle[J].Aerospace Control, 2013, 31(5): 3-7.)
[2] Yang Weiqi, Tang Shuo, Xu Zhi.Control Enhanced and Parameterized Load Relief Technology for a Launch Vehicle[C].AIAA Modeling and Simulation Technologies Conference,Dallas,2015.
[3] 王德爽.基于自抗扰算法的导弹制导系统设计研究[D].哈尔滨工程大学,2012.(Wang Deshuang. Missle Guidance System Design Based on Active Disturbance Rejection Control Algorithm[D]. Harbin Engineering University,2012.)
[4] 徐延万.控制系统(上)[M].中国宇航出版社,1989.
[5] 韩京清.跟踪-微分器的离散形式[J].系统科学与数学,1999,(3):268-273.(Han Jingqing.The Discrete from of Tracking-differentiator[J].J.Sys.Sci&Math.Scis,1999,(3): 268-273.)
[6] 史永丽.改进的非线性跟踪微分器设计[J].控制与决策,2008,23(6):647-650.(Shi Yongli.Design of Improved Nonlinear Tracking Differentiator[J].Control and Decision, 2008,23(6):647-650.)
[7] H. Suzuki. Load Relief Control of H-IIA Launch Vehicle[C]. //16th IFAC Symposium on Automatic Control in Aerospace, St Petersburg, Russia,2004.
[8] Pat Blanchet, B. Bartos. An Improved Load Relief Wind Model for Delta Launch Vehicle[C]. AIAA, Aerospace Sciences Meeting and Exhibit, Reno, 2001.
[9] Jerry Sharp.Attitude Control System for Load Relief of Saturn Class Launch Vehicles[Z]. NASA Contractor Report CR-61375,1971.
