水工建筑物水下结构检测中的应用
2018-06-25,,,,,
,,,,,
(1.广东省水利水电科学研究院, 广州 510635;2.广东省大坝安全技术管理中心, 广州 510635;3.广东省山洪灾害防治工程技术研究中心, 广州 510635)
水利工程结构的安全检测按照位置分为水上结构和水下结构检测,其中,水上结构检测可以利用常规技术,如眼看、耳听、手摸、脚踩等直观检测手段,尺仪、钻探等常规量测,探地雷达、高密度电法、地震法等物探手段进行综合检测。
水利工程水下结构主要包含正常蓄水位水面以下的迎水坡护面结构、进水塔结构以及铺盖、底板、护坦、沉箱等结构。其常出现的隐患主要有建筑物整体沉降,混凝土结构表面的裂缝、分缝或止水破损,金属结构锈蚀等。当前,水利工程水下结构检测的主要方法包括目视检测、水下机器检测(ROV检测)、激光扫描、扇扫声纳成像等。
目视检测是指潜水员潜入水下利用手摸、脚踩、眼看及水下照相技术对水下结构进行检测的方法,该方法技术要求不高,当前使用较广泛,但是潜水员有一定的人身安全风险,且需要有较高的业务素质;ROV检测以机器人技术为载体,结合了水下图像技术、水下声纳及定位技术,具有操作灵活、图像较为清晰直观的优点;激光扫描是指利用激光对水下结构进行三维扫描,成像快速,但是由于激光在水中散射严重而存在成像质量差的缺点;扇扫声纳成像按照扫描方式分为单波束、多波束方法以及三维成像法,其中多波束具有效率高、分辨率高的特点。
1 我国水利工程水下结构的检测应用
水利工程水下构筑物常年处于水下,水流环境复杂,其缺陷具有发现难、处理难、突发性强,引起的后果严重的特点,对其的检测具有较大的难度。
李鹏飞[1]、王祥[2]等系统地总结了近年来水下探测技术在水利工程中的成果及技术优势[3-8]。但是针对基于ROV的水下探查作业,尚未建立统一的水下探测技术标准。
李斌[9]等归纳总结了三维成像技术在富阳岩石岭水库和玉环坎门渔港防波堤修复工程中的应用情况和技术特点;饶光勇[10]等将其运用在北江堤围险段水下地形变化监测中;杨志[11]等利用三维全景成像声纳系统对南京市红山窑水利枢纽泵站、镇江市谏壁河口码头、长江下游和畅洲汊道崩窝水下岸坡等进行了检测应用;笔者利用雷达技术对水下水闸底板渗流隐患探测进行了相关研究[12]。以上研究均取得了较为理想的成果,积累了一整套的实践经验。
笔者通过水下机器人系统以及多波束成像声纳系统在水库大坝、水闸等水利工程中的应用实例,总结了水下构筑物检测的应用方法和技术成果,探讨了相关关键技术、应用难题与适用范围,为二者在水利工程水下安全隐患探查中的联合应用积累了实践经验。
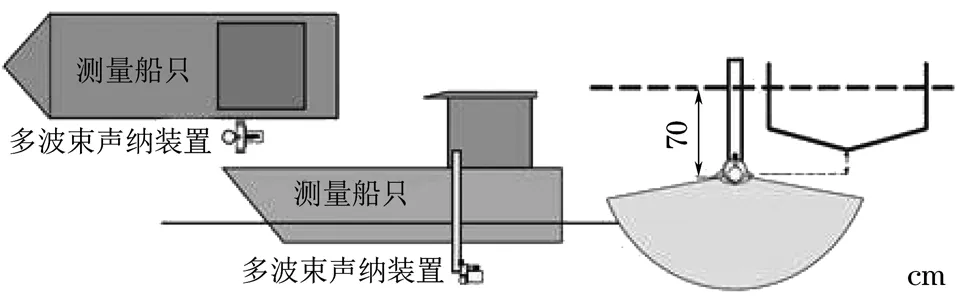
图1 多波束(扇扫)系统测量示意
2 系统介绍及其特点
2.1 多波束成像声纳系统
NORBITWBMS多波束系统主要由声纳装置、数据采集装置、设备安装支架及连接线组成,外业测量一般采用船舷固定布设方式(见图1)。其中声纳装置的理想覆盖角度为140°,波束数为256,理想测量深度为100 m(见表 1),系统能满足水利工程大部分水下结构及河道测量需求。目前,该系统主要应用在水下结构检测、河道地形测绘、水下考古、沉船搜救、辅助海底管线敷设等工程领域。
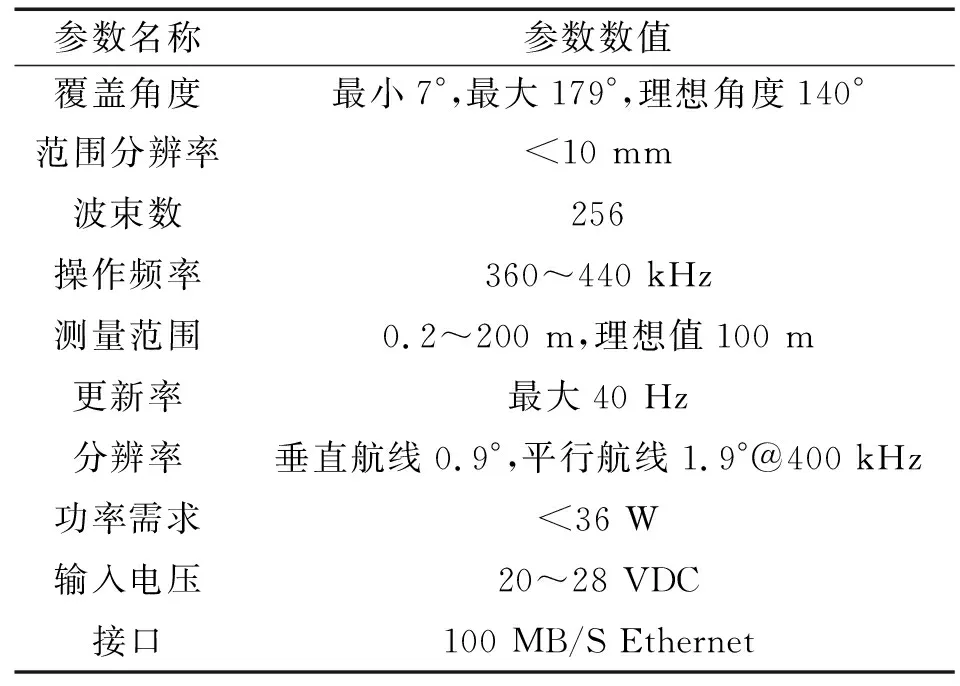
表1 多波束成像声纳系统参数
与采用光学成像技术和传统测深系统不同的是,多波束成像声纳系统工作效率高、成像直观准确,数据可三维化,且不受探测水域水质的影响,在水体浑浊、水质较差的环境下仍可保证成像的清晰度和精确度。

图2 水下机器人系统结构示意
2.2 水下机器人系统
H300 MKII水下机器人系统由框架、水平及垂直推进器系统、水下电子仓、高灵敏度黑白摄像机、彩色摄像机、照明灯、云台、罗经及高度计等组成(见图2),其最大耐压深度为300 m,能覆盖水利工程中绝大部分水下结构的检测,具有三轴(水平、垂直、侧向)以及绕自身旋转的高抗流运动能力,其参数如表2所示。其关键技术包括水下机器器人的控制、导航、图像数据通信等。该系统目前主要应用于水利、海洋、考古等领域的水下检测、维修、打捞等。
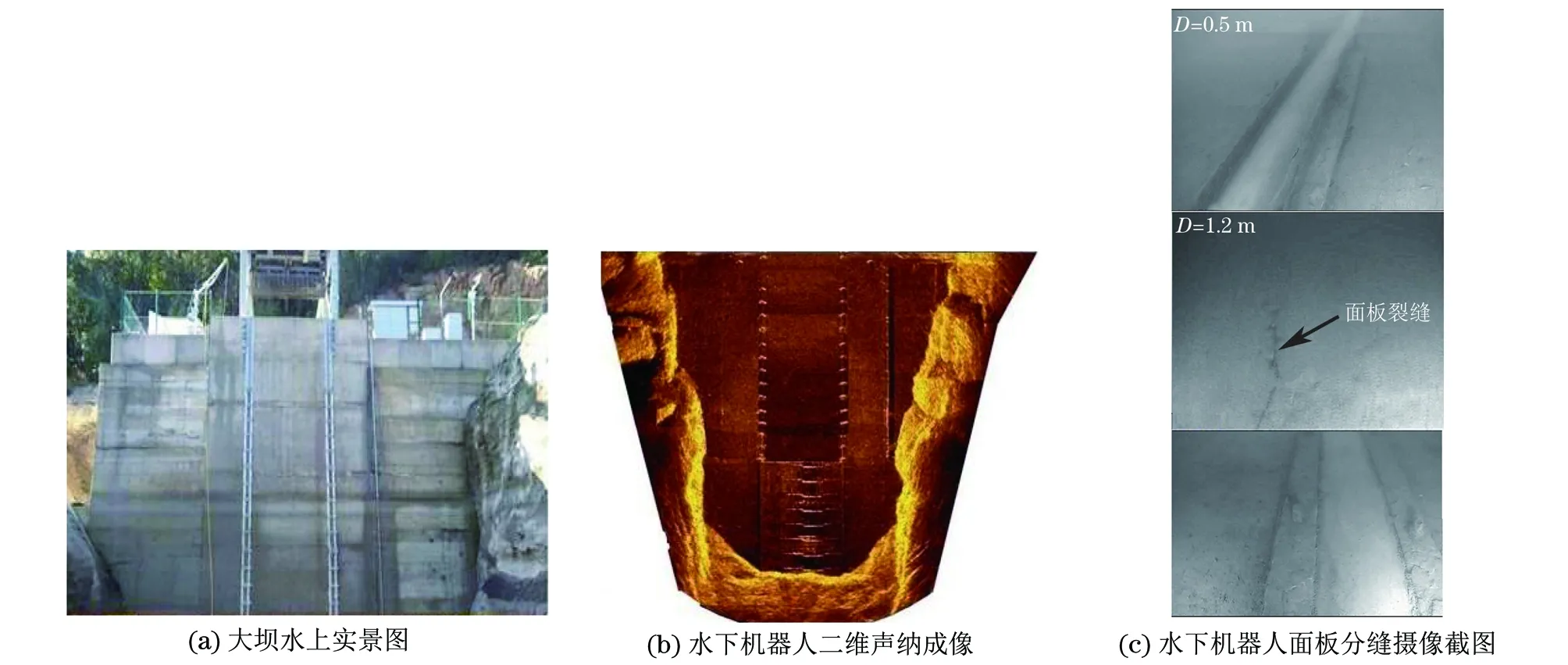
图5 某大坝的水上实景图与水下机器人系统探测结果
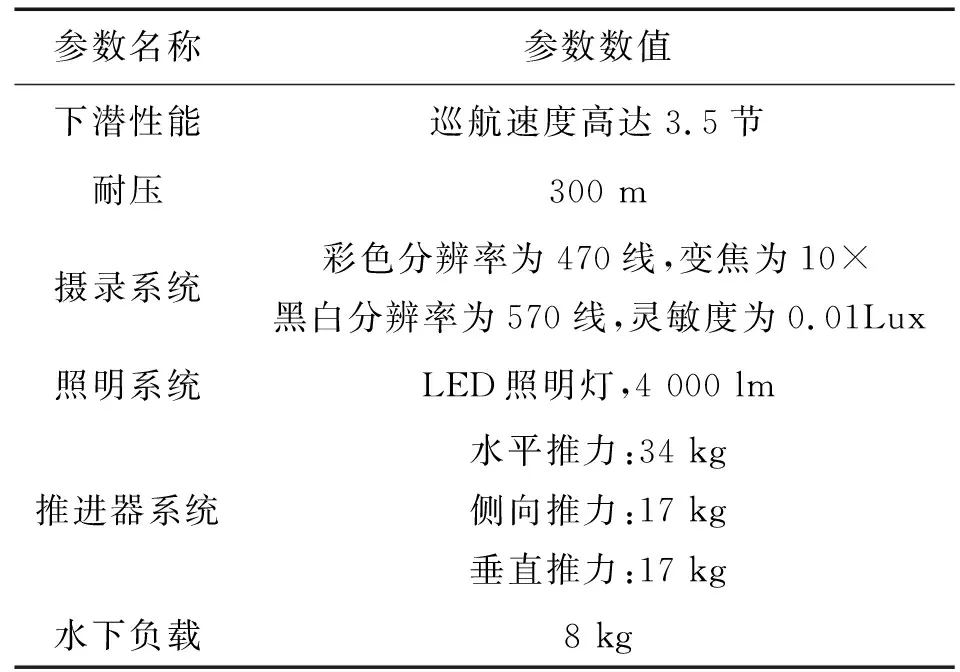
表2 水下机器人系统参数
水下机器人具有检测高效、直观的特点,能够按照既定指令快速前往指定部位进行检测,工作效率高,但是其灵活性还有待提高,且在水质浑浊水体中的探测效果不理想。
3 工程应用
3.1 护坦检测
某水利枢纽工程处于深厚的高压缩性的流塑淤泥基础上,因此枢纽水闸前后护坦采用了水下吊装空箱式预制件方案进行建造,先对水闸前后护坦进行水下疏浚并找平,空箱预制件在自浮运到预定的沉放地点后,定位充水下沉,其平面结构示意如图3所示。
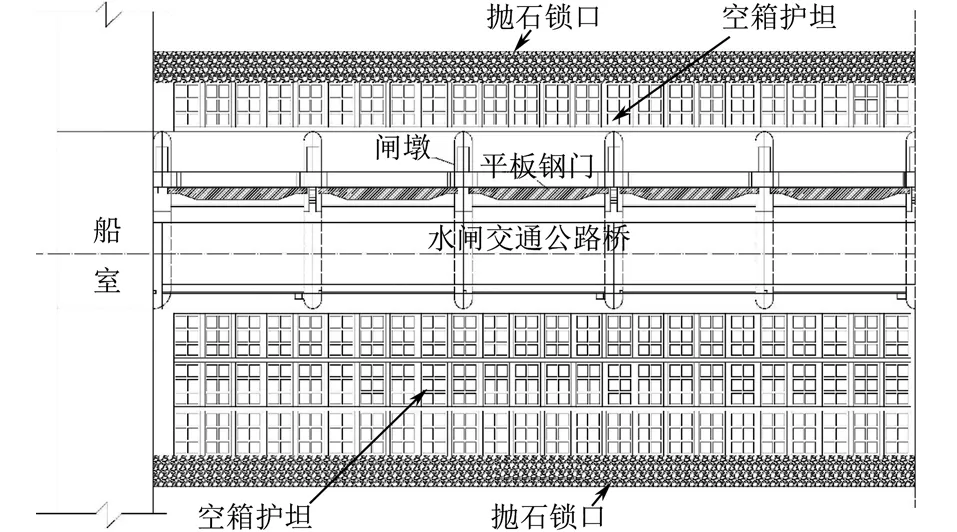
图3 枢纽工程平面结构示意
多波束系统对其的探测结果表明,水闸内外江护坦结构均能比较完整、清晰地呈现出,沉箱结构基本完整,轮廓清晰且无破损情况,但是大部分沉箱在长期水流作用下散乱沉陷,部分已被淤泥覆盖(见图4),淤泥深厚的河床中普遍出现了“沙跑石沉”的现象。由此可见,多波束系统可以对水下地形、工程结构等实现较为完整的探测。
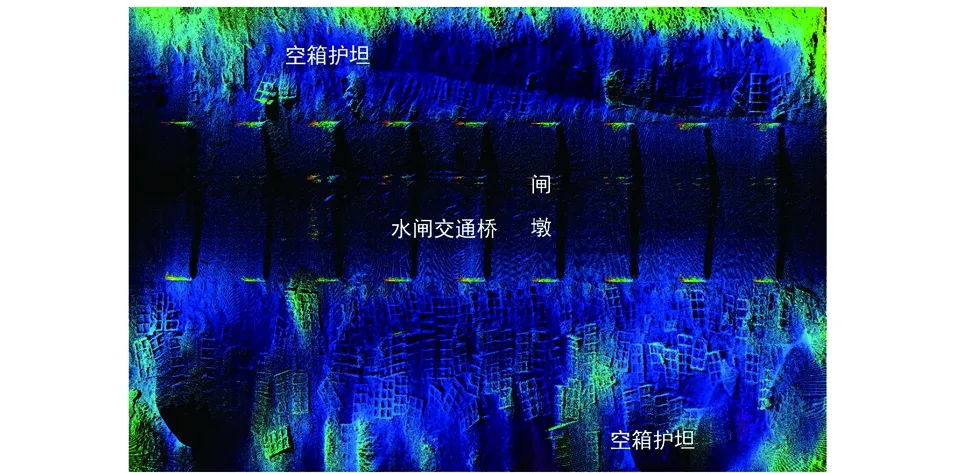
图4 多波束成像声纳系统的检测成果
3.2 水下混凝土面板裂缝与止水检测
水下机器人系统的核心检测系统为摄录照明系统,包括高分辨率摄像机(高清彩色变焦摄像头和黑白低照度摄像头)和高亮度照明灯,另外系统上可搭载二维声纳成像系统,以实现对水下结构形状及周边地貌的简单测量。
某水库大坝的水上实景图如图5(a)所示,水下机器人对其上游面板水下分缝止水和面板的检测及其二维声纳成像结果,如图5(b),(c)所示。
检测结果表明:各面板表面无明显的贯穿性裂缝和大面积明显的混凝土缺失等隐患;各条橡胶止水基本完整,局部表面皲裂,部分固定螺母缺失;在1.2 m水深处发现一条裂缝,经核实此条裂缝为混凝土浇筑时丝带、竹条或钢筋等条状物落入混凝土表面后,由施工人员清除后留下的痕迹,非贯穿性裂缝。
4 结论与展望
(1) 多波束成像声纳系统能够在能见度较低的水域进行探测,检测效率高,检测结果直观,具有良好的适用性,但是只能探测工程表面结构和隐患。
(2) 水下机器人适用于水下大面积、大范围检测,结果直观可靠,但是只能探查水利工程的表面情况,在水体浑浊、水工结构和水流流态复杂的条件下无法进行细致检查,难以对缺陷实现精确定位。
下一步的研究方向可以采用三维多波束系统、雷达系统装载到水下机器人上进行三者联合探测,实现在浑浊水体情况下既能探测工程表面情况,又能检测工程内部缺陷。
参考文献:
[1] 李鹏飞,吉同元,汤子璇,等. 涉水工程水下结构检测现状分析及展望[J]. 中国水运,2017,17(5):301-302.
[2] 王祥,宋子龙. ROV水下探测系统在水利工程中的应用初探[J]. 人民长江,2016,47(2):101-105.
[3] 托尔斯滕 P,徐耀,张垚,等. 基于无人水下机器人的水电站和大坝检测技术[J]. 水利水电快报,2015,36(7):26-29.
[4] 李璐. 水下机器人在病险水利工程检测中的应用[J]. 湖南水利水电,2015(5):46-49.
[5] 杨胜梅,赵秋云. 水下机器人的应用现状[J]. 水利水电快报,2015,36(11):29-31.
[6] 李钟群,孙从炎,蒋晓旺,等. 水下机器人在浙江省水库大坝检测中的初步应用[J]. 浙江水利科技,2010(3):57-59.
[7] 吕骥,张洪星,陈浩. 水下机器人(ROV)在水库大坝检测作业的安全分析[J]. 水利规划与设计,2017(10):112-114.
[8] 张晏方,邓勇,毕文焕,等.水下隐蔽工程检测技术在长江航道整治工程中的应用[J].水运工程,2010(10):64-69.
[9] 李斌,金利军,洪佳,等. 三维成像声纳技术在水下结构探测中的应用[J]. 水资源与水工程学报,2015,26(3):184-188,192.
[10] 饶光勇,陈俊彪. 多波束测深系统和侧扫声呐系统在堤围险段水下地形变化监测中的应用[J]. 广东水利水电,2014(6):69-72.
[11] 杨志,王建中,范红霞,等. 三维全景成像声呐系统在水下细部结构检测中的应用[J]. 水电能源科学,2015,33(6):59-62,47.
[12] 徐云乾,杨文滨,袁明道,等. 水闸底板渗流隐患的探地雷达检测[J]. 无损检测,2017,39(9):83-86.