爬壁机器人在大型立式储罐径向偏差测量中的研究与应用
2018-06-22张竟月王金涛时文才暴雪松郭立功中国计量科学研究院北京0009中国计量大学浙江杭州008青岛市计量技术研究院山东青岛66000
佟 林, 张竟月, 王金涛, 魏 凯, 时文才, 暴雪松, 郭立功(. 中国计量科学研究院, 北京 0009; . 中国计量大学, 浙江 杭州 008;. 青岛市计量技术研究院, 山东 青岛 66000)
1 引 言
大型立式储罐作为国家强制检定的工作计量器具,广泛应用在在国际、国内石油贸易结算中[1]。随着近年我国石油化工建设的飞速发展,大型立式圆柱形金属储油罐逐年增多,但伴随着石油这一不可再生能源的日益较少,立式金属罐容积的准确与否就具有举足轻重的作用。
按照JJG 168—2005《立式金属罐容量》检定规程[2]的规定,储罐圈板半径是储罐容量计算的必要参数,因而,在储罐容量检定时,必须确定储罐所有圈板的半径。立式金属罐圈板半径检测主要采用几何测量法[3~4],而作为其中一种测量方法的径向偏差测量法一般采用光学垂准线法,即采用人工拉动移动式径向偏差测量仪与光学垂准仪相结合的方法,但该方法存在劳动强度大、操作危险、由于罐体高导致人工找点存在误差等缺点。
参照该测量方法,研制了一种能够携带测量仪器的爬壁机器人[5~7],并使其按照垂直方向进行上下运动,并于指定位置停留以方便操作人员进行测量,同时永磁性履带及抗倾覆机构的设计也大大增强了测量过程的安全性,为了验证该爬壁机器人径向偏差的测量精度[8],课题组选取一座1 000 m3的立式储罐进行试验验证,试验结果表明爬壁机器人的测量精度能够达到1 mm。
2 爬壁机器人整体设计
2.1 爬壁机器人的机械系统
爬壁机器人的机械系统主要由4大机构组成,分别是吸附机构、传动机构、测量机构及抗倾覆机构。爬壁机器人本体结构如图1所示。

图1 爬壁机器人机械系统图
吸附机构主要包含有永磁性履带,磁性履带是由磁铁通过磁铁座固定到链条上,磁铁表面设有橡胶薄膜,以增大滑动摩擦系数。传动机构主要包含有传动齿轮箱、链轮及张紧轮,通过齿轮箱保证机器能够获得足够大的扭矩,张紧轮则通过弹簧的拉力保持一定力量压紧磁性履带,使磁性履带前部行走时总是贴紧到金属罐壁上。测量机构,包括活动轴、车轮、滑块和配重,活动轴的双侧设有车轮,活动轴上设有能够在其上滑动的滑块,将标尺安装在滑块上,配重也安装在滑块上。抗倾覆机构是爬壁机器人的一个重要组成部分,它主要由2部分组成:一是爬壁机器人机头位置下面安放的一块大的永磁铁;二是测量机构中的后支撑板及支撑轮。此两部分的设计能够避免爬壁机器人在爬行过程中产生打滑及倾覆的危险。除此之外,基于应用的危险性,本系统加入了防爆设计,防爆设计主要包含防爆外壳的设计,以及一些防爆插座和密封胶体,防爆机构的主要作用就是保障测试过程中系统的安全。
2.2 爬壁机器人的电气系统
爬壁机器人的电气系统主要由3部分组成,即硬件系统、软件系统和通信部分,如图2所示。硬件系统包含爬壁小车的硬件、电源通信箱的硬件及手控器。软件系统包含爬壁小车的主控软件和手控器的软件。通信部分由两块通信单元组成:一是手控器和电源通信箱的433 MHz无线通信,通信协议采用MODBUS协议,手控器为主机,电源通信箱为从机;二是通信箱和爬壁机器人的RS485通信。

图2 爬壁机器人电气系统图
爬壁小车的硬件主要由主控板、双电机、双电机驱动器、倾角传感器、温度传感器组成,其中主控板为其核心部件,采用32位ARM单片机设计,配以输入输出接口,主要用来输出步进电机的控制脉冲信号,采集步进电机的转速、温度,以及机器人的两个方向的角度,通过RS485通信接口接收来自电源通信箱的指令,并发送当前机器人的各个参数。
电源通信箱主要功能是为机器人提供电源,并可以通过一个触摸屏显示器显示机器人当前的工作状态,包括速度、高度、角度、温度等信息,同时可以通过触摸屏对机器人的基本工作过程进行设置,包括安全高度、运行速度、脉冲距离等关键参数。
手控器主要实现机器人的控制功能,选用了通用的手机型手持终端,带LCD字符显示屏和19个按键,通过按键和无线通信,实现机器人的启动、停止、转弯,以及自动化测量控制。
2.3 爬壁机器人的软件系统
爬壁机器人的软件系统主要包括两部分,分别是爬壁机器人的主控软件部分以及手控器的软件部分。主控软件有3个功能:1)实现电机的控制和位置的计数;2)实现一些数据的采集,如温度,倾斜角度,编码器计数,通过数据的采集来实现小车更精准的控制;3)实现和地面控制器的通信,采用了标准的RS485 MOBUS串行协议。
手控器软件的主要功能:给爬壁小车发送相应的控制指令,指挥小车的运动,如启动、停止、前进、后退、左转、右转等动作,同时还能够显示当前的状态和一些运动参数,如运动状态、高度、倾角、速度、行程、电量等。除此之外,手控软件还可以对一些运动参数进行设置,如速度、行程、脉冲当量等,如图3所示。
3 试验验证
选择一座1 000 m3的拱顶立式金属罐作为试验对象,按照JJG 168—2005《立式金属罐容量》检定规程的要求,径向偏差测量应在每一圈板的1/4及3/4处,因此在每一圈板所要测量处做好相应标记,通过与现行有效的光学垂准线法及全站仪法的试验比对来判断该方法的可行性。
3.1 光学垂准线法
首先,采用规程中所规定的光学垂准仪和移 动 式 径 向 偏差测量仪组合的方法对该水平测站进行测量,保持光学垂准仪静止不动,拉绳使移动式径向偏差测量仪按垂直方向向上运动,停于各圈板的垂直测量点上,逐一读取各圈板的移动式径向偏差测量仪标尺的读数,共往返6次测量,数据如表1所示。
在表1中以第一圈板3/4处测试数据作为标准值,其它各圈板所测得的数据均与标准值相减,所得出的差值即为径向偏差,其中负值表明罐壁向外凸起,正值表明罐壁向内凹陷,其它仪器所测数据的处理均以此方法处理。
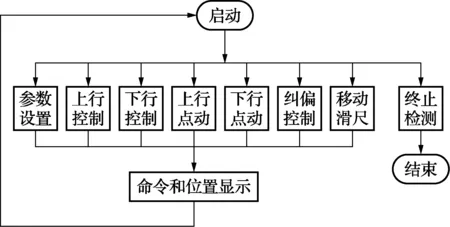
图3 手控器软件框图
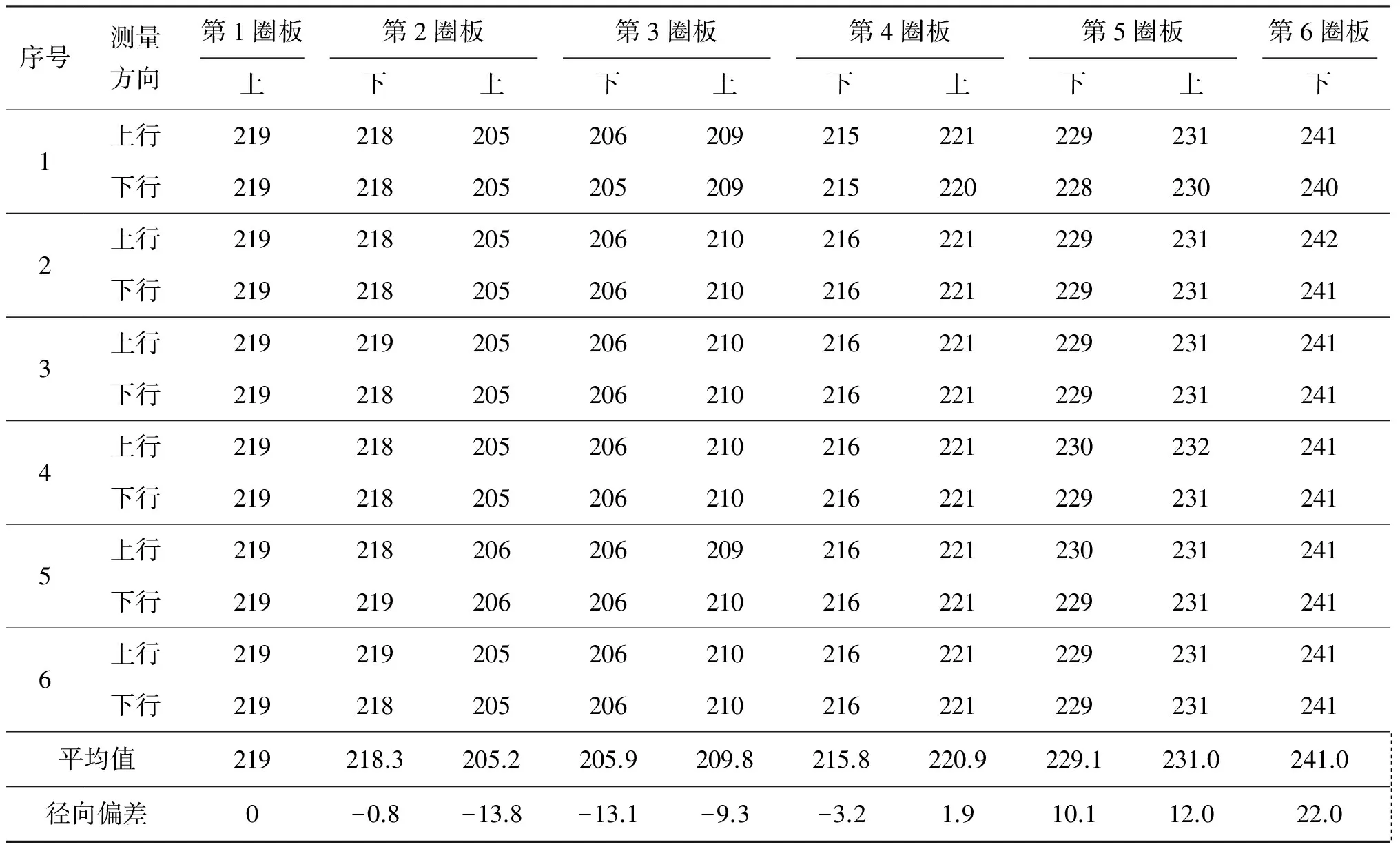
表1 光学垂准线法6次测量数据 mm
3.2 爬壁机器人法
采用光学垂准仪和爬壁机器人组合的方法对该水平测站进行测量,调整爬壁机器人的左右位置,使垂准仪能清楚地看到标尺的读数。
将第一圈板3/4处设置为零位,然后在软件界面输入各个圈板的高度值,软件将计算出机器人自动停止的位置,并在测试时能够确保机器人所停止的位置与所做标记处重合。测试从第一圈板3/4处开始,读数后按下启动键,爬壁机器人按照设定速度自动垂直上行,到达第二处位置时停止,再读数、启动,以此类推测试到第6圈板3/4处并读数,然后按下行按钮,机器人自动下行,测试下行数据。共往返6次测量,数据如表2所示。

表2 爬壁机器人法6次测量数据 mm
3.3 全站仪法
用全站仪对该水平测站的各标记测试点进行测试,将全站仪设立于罐体标记点的垂直方向上。将全站仪调整水平,将激光瞄准器打开,测试时利用激光光斑来瞄准罐壁所做标记点,点击测试按键则全站仪将测量出罐壁标记点至全站仪垂直轴线的水平间距。共上下往返6次测量,数据如表3所示。

表3 全站仪法6次测量数据 mm
由3种不同设备进行测试后,可以得出移动式径向偏差测量仪和爬壁机器人所测出的径向偏差最大差值为1 mm,见表4;爬壁机器人和全站仪所测出的径向偏差最大差值为0.5 mm,见表5。
按照现行的JJG 988—2004 《立式金属罐径向偏差测量仪检定规程》[9]要求,径向偏差测量最大允许误差应优于±2 mm,因此通过本次现场试验可以验证爬壁机器人满足规程要求。

表4 移动式径向偏差测量仪与爬壁机器人径向偏差测量结果差值表 mm

表5 全站仪与爬壁机器人径向偏差测量结果差值表 mm
4 结束语
研制了一种能够携带测量仪器的爬壁机器人,实现立式金属罐径向偏差的自动测量。设计了独特的抗倾覆机构及手动控制机构,同时通过现场试验及数据处理分析,试验结果与参照值之差最大为1 mm,肯定了爬壁机器人测量大型立式储罐径向偏差的可行性。经现场试验证明该爬壁机器人具有运动灵活、操纵性好、对工作面适应性好、安全稳定的特点。
[参考文献]
[1] 刘子勇.容量计量[M]. 北京:中国计量出版社, 2009.
[2] JJG 168—2005 立式金属罐容量[S].
[3] ISO 7507-1 Petroleum and liquid petroleum products-calibration of vertical cylindrical tanks [S].
[4] ISO 7507-2 Petroleum and liquid petroleum products-calibration of vertical cylindrical tanks Part 2:optical reference linemethod [S].
[5] 田兰图, 杨向东, 赵建东, 等. 油罐检测爬壁机器人结构与控制系统设计[J]. 机器人, 2004, 26(5):385-390.
[6] 张立国, 肖军, 佟仕忠, 等.立式金属罐容积检定爬壁机器人本体设计[J]. 工业仪表与自动化装置, 2010, (2):37-41.
[7] 荆兆东, 佟仕忠, 张立国, 等. 立式金属罐容积检定机器人控制系统设计[J]. 科学技术与工程, 2010, 10(23):5772-5775.
[8] 佟林, 王金涛, 刘子勇, 等. 基于光电内测法的立式罐容量计量中圈板半径拟合算法的研究[J].计量学报,2011,32(6):522-525.
[9] JJG 988—2004 立式金属罐径向偏差测量仪检定规程 [S].
