微风速标准装置的建立和热线风速仪校准方法的实验研究
2018-06-22崔骊水邱丽荣李建双北京理工大学北京0008中国计量科学研究院北京0009
崔骊水, 李 鹏, 邱丽荣, 李建双(. 北京理工大学, 北京 0008; . 中国计量科学研究院, 北京 0009)
1 引 言
热线风速仪(hot wire anemometer,HWA)是一种非常重要的流速测量仪器,尤其是在微风速的测量中有独特的优势,这种优势使热线风速仪在0.1~1 m/s的微风速测量中有广泛的应用。然而,微风速测量的溯源问题并不容易解决,这也使热线风速仪在微风速范围的校准成为相关行业和机构关注的问题[1,2]。制药、生物安全和电子制造等领域对微风速计量均提出了更加明确的要求。在实际应用中,需要事先对热线风速仪进行标定,才能得到准确的测量结果[3]。目前世界各国已建立的风速标准装置多以皮托管和激光多普勒测速仪(LDV)为主,但这两种风速标准装置在微风速的测量和校准中均存在相应的问题:皮托管的测量原理基于伯努利方程,伯努利方程中忽略了粘性力的影响,在微风速的测量中,粘性力对测量结果有显著的影响[4],因此皮托管无法进行微风速的准确计量;LDV在测量流速时,必须在流体中散播散射粒子,而散射粒子在低速流动下的跟随性无法得到有效的量化验证[5~7],因此LDV在测量微风速时的准确度水平遭到质疑。
20世纪60年代英国NPL研发了旋臂机校准风速仪[8];意大利INRIM在地下实验室建立了微风速标准装置[9];日本NMIJ利用长105 m的地下隧道建立了相对法的微风速计量标准[10]。由于地下隧道良好的温场分布,使得微风速下风速仪的校准问题得到了成功解决。 在中国计量科学研究院(NIM)深度8.3 m的地下实验室建有83 m直线导轨用于长度校准,该实验空间有良好的温度分布,利用现有的基础设施搭建了国内首套微风速标准装置。本文的实验是使用热线风速仪首先在该装置上进行校准并且得到了实验结果。
2 微风速标准装置的建立
2.1 微风速标准装置的概述
微风速标准装置主要由长导轨、气浮滑车、测量系统、数据传输装置、控制系统及安全防撞装置组成。为了减小操作者走动和散热的影响,装置以无线传输的方式进行滑车控制和数据采集。通过对以上几部分的搭建装配,形成了完整的导轨实验平台。校准实验布置示意图如图1所示。

图1 校准实验布置示意图1—激光干涉仪;2—缓冲器;3—挡板;4—路由器;5—导轨支撑架;6—花岗岩导轨;7—反光镜;8—热线探针;9—无线通讯模块;10—无线数据采集卡;11—零位开关;12—限位开关
2.2 测量环境
微风速标准装置位于NIM昌平新园区地下8.3 m长约90 m的独立隧道中,隧道内温、湿度稳定,没有空调工作的条件下可以保证温度的变化在24 h内小于0.5 ℃,湿度变化不超过5%。在导轨方向上分布着20对温湿度传感器用于监测环境条件的变化,保证了自然对流影响尽可能地小。
2.3 导 轨
导轨是由矩形花岗岩拼接而成。导轨内侧的铜轨用于气浮滑车所搭载的设备提供24 V电压。导轨下方有相同长度的基台,基台和导轨之间由多个气浮支撑架和承重底座连接,通过调节气浮支撑架可实现导轨在两个方向的微调。为了避免操作过程中运动滑车与其他设备发生碰撞,在总长83 m的长导轨上选取其中60 m用于实验研究,该距离的选取考虑了实验操作的安全以及滑车可运行的最大速度,并且在最大速度下可以获取足够的测量数据等因素。事实上导轨长度的限制意味着滑车运行时间也必须是有限的,滑车的运行包括加速、匀速、减速,为了保证实验的有效性,匀速运行时间至少30 s。导轨如图2所示。

图2 花岗岩导轨和气浮滑车
2.4 气浮滑车
气浮滑车的构架由花岗岩和铝制材料组成。滑车依靠底部和侧面的多个供气0.4 MPa的气浮模块浮在导轨表面,使得滑车在运动过程中不与导轨发生摩擦。滑车进气端安装的空气过滤器可以滤去气体中油渍和杂质,防止堵塞滑车气浮模块保证滑车正常运行。通过设置压力传感器下限压力值来避免滑车在运动过程中由于气体压力降低与导轨之间摩擦损坏实验设备。滑车上用于固定热线探针的三角支架可以在步进电机的驱动下固定在滑车的不同高度位置,以便在高度方向上找到扰流影响较小的测量位置。支架伸出滑车1.5 m始终处于滑车的最前端,因此避免滑车运动时扰流对被校传感器的影响。滑车的单侧安装有尼龙滚轮,尼龙滚轮在导轨上滚动,带动滑车运动,尼龙滚轮由伺服电机驱动实现在不同的速度点下的稳定直线运动。气浮滑车如图2所示。
2.5 测量系统及数据传输装置
装置的测量系统主要由激光干涉仪组成[11,12],通过激光干涉仪对时间的比可得到气浮滑车的运行速度。激光干涉仪测得长度和时间均可溯源至NIM基准以保证测量精度。为了隔绝操作者的影响,包括伺服电机的控制、干涉仪测量的长度、被校热线输出电压的采集等所有的控制命令和信号传输均通过无线传输的方式实现。实验环境下激光干涉仪和操作位置分别位于导轨的两端,因此在激光干涉仪测量端安装数据发射器以及在操作端工控机上安装数据接收器(两个数据传输设备采用zigbee无线传输技术)。校准实验中热线风速仪的输出电压由安装在滑车控制箱上的无线传输机箱NIDAQ-9191(WiFi无线传输技术)进行数据传输。实验过程中工控机通过编写的上位软件实时记录无线装置传输的数据直至测量停止,由这些记录的实验数据可得到风速仪的校准结果。
2.6 控制系统
实验中应用的工控机安装的上位软件不但可以接收记录实验数据并且还具备控制滑车运行的功能。
控制系统采用W2250A无线通讯模块,将RS232通讯转换成无线网传输方式,负责控制卡(PMAC-PC104)和工控机之间的通讯传输。整个控制流程是将信号通过无线传输模块传送至运动控制卡,实现参数配置,通过I/O(限位、回零、报警等信号处理)等功能处理,步进电机驱动器接收控制卡发出的脉冲指令,通过运算放大电路输出相应的电流到步进电机。电机将电能转换为机械能使电机轴转动,并带动滑车运行。校准实验的信号流程图3。
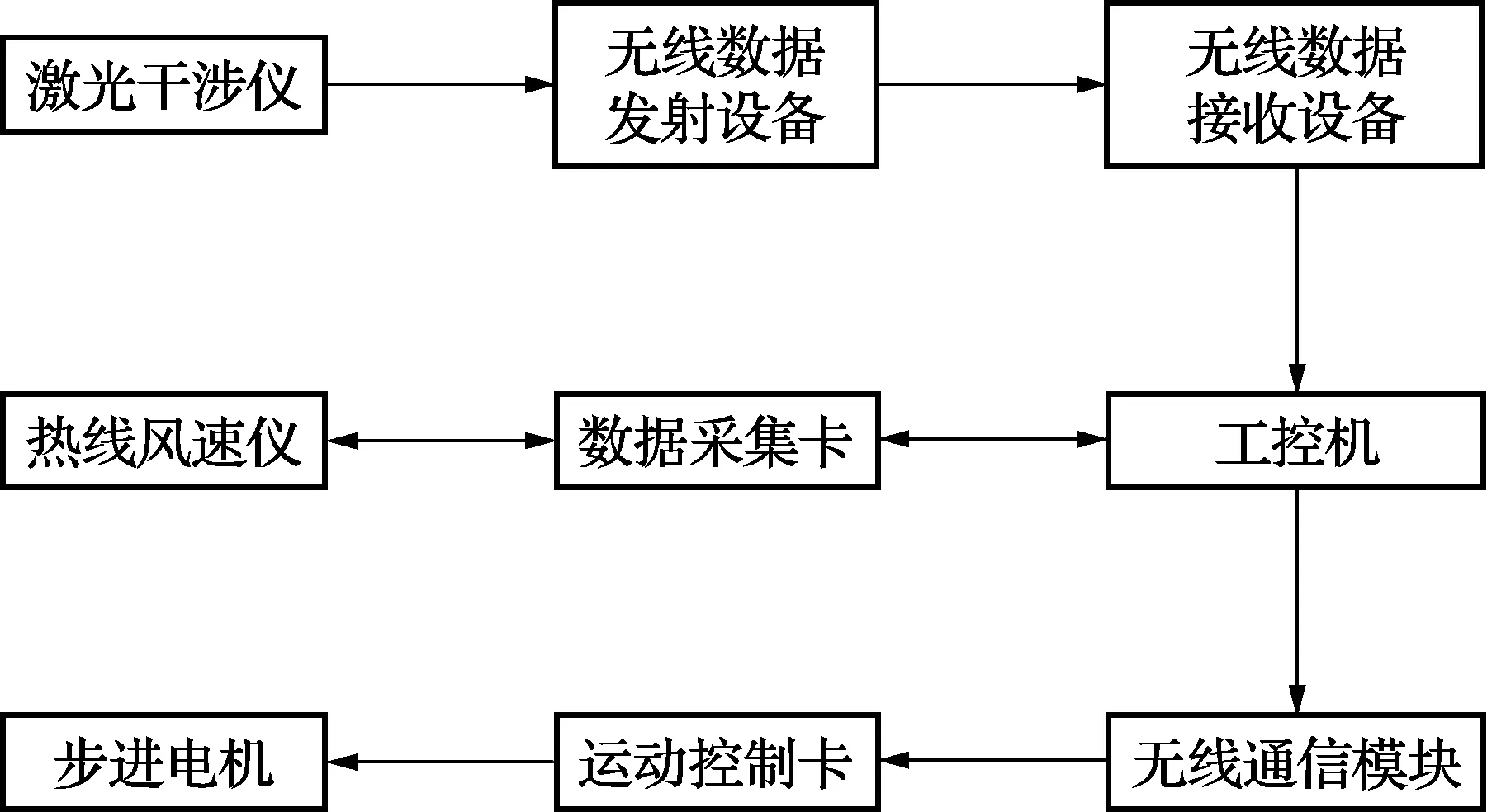
图3 校准实验信号流程图
2.7 安全制动装置
为了减少和降低实验操作风险保证实验的顺利进行,在标准装置上安装了多道制动装置:首先是系统制动程序,在紧急情况下通过在程序中启动停止命令窗口强制滑车停止运行;其次如果运行程序出现失灵时,当滑车运动到导轨实验段两端触碰限位挡板同样可以使滑车停止运行;当以上制动过程均没有起到制动效果时,滑车只能通过撞击导轨上制动挡板强行使滑车停止,通过在导轨的制动挡板上安装油压缓冲器来降低滑车在撞击挡板过程中滑车和导轨的损坏程度。在程序编写过程中考虑了滑车的安全运行距离,最后一道制动装置一般不会用到。
3 热线风速仪的校准
在实验前,自然对流和二次流的影响首先被考虑。关于自然对流,热线风速仪在导轨上静止一段时间发现热线输出电压的最大、最小值分别为1.340 V和1.343 V,分别对应的速度值为0.065 m/s和0.071 m/s,其差值为0.006 m/s,差值表征了自然对流的影响,但也包括了信号采集零漂的影响,因此,自然对流的影响一定小于差值0.006 m/s。为了减少操作者在准备工作过程中对流场的影响,实验开始前需要静置15 min。
3.1 二次流的影响
二次流主要是滑车在运动和返回起始位置时扰动气流造成的。校准时热线探针始终位于前部,滑车的扰流始终位于探针运动的后方,因此可以忽略。但滑车在回程时造成的二次流动需要等待一段时间。为了确定等待时间以及提高实验效率,实验过程中使滑车在回到起点后等待不同时间后沿着导轨做直线运动,比较不同等待时间的条件下热线的测量结果,即输出电压的差异,从而判断小车回程引起的二次流对实验的影响。测量结果见图4。

图4 不同等待时间的电压分布
由图4可知,在以上不同速度点下热线输出电压值的标准偏差均小于标准装置测量不确定的1/3,因此当2次测量之间的等待大于120 s,即可忽略滑车在运动和返回起始位置时扰动气流造成的影响。
3.2 静态特性分析
实验选用的是恒温型热线风速仪,即工作电阻Rw为常数,流速V和热线工作电流Iw呈单值关系。热线风速仪静态特性方程为:
(1)
将式(1)改为以电压作为输出量,其静态特性表达式为:
(2)
式中:Iw为流过热线的电流;Rw为热线的工作电阻;Rf为流体温度为Tf时热线的电阻值;αf为流体温度为Tf时热线的电阻温度系数;A和B为常数项所确定的参数;Ew为热线的输出电压。流场环境温度Tf=22.8 ℃,Rw=6.03 Ω,即热线探针在242 ℃时的工作电阻,Rf=3.38 Ω,αf=0.003 6,由此可确定热线风速仪的物性参数A和B的值:A=1.2×10-3,B=6.1×10-4。由已知参数和静态特性方程可知恒温型热线风速仪的理论计算公式为:
(3)
整理得
(4)
理论计算和实际测得的速度见图5。由计算结果可知两支探针的理论计算值与实验测得值具有良好的一致性。

图5 热线风速仪测得值和计算值一致性
4 不确定度分析
热线风速仪校准结果的不确定度主要取决于微风标准装置的不确定度和测量结果的重复性。
4.1 微风速标准装置的不确定度
标准装置的不确定度主要来源为激光干涉仪对行程的测量和滑车运动时间的测量的不确定度,此外,导轨的直线度也是影响测量结果不确定度的因素。
4.1.1 激光干涉仪测距s
激光干涉仪测距的准确度指标为0.2 mm/x,x为测量距离;气浮滑车的运动距离最小为20 m,此项可忽略。此外,s的不确定度还包括由波长、导轨直线度以及环境变化导致空气折射率的改变引起的测量不确定度[11,12]。综合考虑得激光干涉仪测距s的相对不确定ur(s)=0.01%。
4.1.2 激光干涉仪测速系统时间t
激光干涉仪测速系统时间t的不确定度来源由同步精度、系统时间、软件延时组成。实验过程中通过网络授时服务软件完成系统时间与NIM时间基准同步。授时服务软件实现每隔60 s同步一次,同步时刻的精度为0.1 s,设第n次同步时的时刻为t1,第n+1次同步时的时刻为t2,即Δt=t2-t1=60 s,则两次同步之间的时间不确定度为:

相对不确定度:
ur(Δt)=0.13%。
4.1.3 导轨直线度
导轨气浮支撑可以实现导轨两个方向方便的调整,导轨全长直线度:YY方向≤±0.2 mm/80 m,XX方向≤±0.2 mm/80 m。
综上,微风速标准装置的不确定度的来源见表1所示。

表1 微风速标准装置不确定度分析一览表
4.2 热线的测量重复性
(5)

综上,微风速标准装置的不确定度及热线的测量重复性引起的热线测量不确定度结果见表2。

表2 热线风速仪测量不确定度一览表
5 结 论
为了研究微风速段0.1~1 m/s热线风速仪的校准方法,在地下83 m导轨上采用相对法原理,通过微风速标准装置对热线风速仪进行了校准。由激光干涉仪对时间的比可得到气浮滑车的运动速度,并在运动过程中获取热线风速仪的输出电压。在实验开始前对滑车测量时以及在返程过程中产生的二次流对空间流场的影响进行评估,实验结果表明等待时间在120 s以上即可。通过对热线风速仪的静态特性分析,得到了静态方程中常数项的数值,并且理论值和计算值具有良好的一致性。由实验结果可知:微风速标准装置的扩展不确定度U=0.82%(k=2);热线风速仪校准结果的扩展不确定度为U=2.42%(k=2)。
[参考文献]
[1] 韦青燕,张天宏. 高超声速热线/热膜风速仪研究综述及分析[J]. 测试技术学报, 2012, 26(2):142-149.
[2] 论立勇,陈厚磊,蔡京辉.高压交变流动下热线风速仪标定方法研究[J].实验流体力学,2010,24(3):87-91.
[3] 唐经文.热工测试技术[M].重庆:重庆大学出版社,2008:190-195.
[4] 崔骊水.基于激光多普勒测速仪的皮托管校准实验研究[J].计量学报,2014,35(6):603-606.
[5] 肖亚克,贾元胜,张孝棣,等.PIV 技术中的示踪粒子发生和布撒[J].气动研究与实验,2005,22(4):8-15.
[6] 李志平.激光粒子图像测量中示踪粒子特性及实验方法研究[D].天津:天津大学,2007.
[7] 黄志煌,刘俊杰,国凯. 激光粒子计数器校准中气溶胶稀释方法的研究[J]. 计量学报, 2016,37(4): 448-451.
[8] 盛森芝,沈熊,舒玮.流速测量技术[M].北京:北京大学出版社,1987:165-171.
[9] Spazzini P G, PiccatoA, Malvano R. Metrological features of the linear low-speed anemometer calibration facility at INRIM[J].Metrologia,2010,46 (1):109-118.
[10] Terao Y , Choi Y M , Gutkin M ,etal. Final report on the APMP air speed key comparison (APMP.M.FF-K3)[J].Metrologia, 2010, 47(7): 88-94.
[11] 冯建,李瑞君,何亚雄,等.微纳米三坐标测量机的高精度恒温箱研制[J].计量学报,2015,36(5):455-459.
[12] 张旭东,刘香斌,王世婕,等.新型移相量块干涉仪的研制[J].计量学报, 2017,38(3):257-261.
