机器人辅助肛门成形术治疗先天性肛门闭锁9例
2018-06-21常晓盼汤绍涛曹国庆普佳睿杨德华
常晓盼 汤绍涛 曹国庆 普佳睿 阳 历 张 茜 李 帅 杨德华 周 莹 李 康
(华中科技大学同济医学院附属协和医院小儿外科,武汉 430022)
1 临床资料与方法
1.1 一般资料
本组9例,均为男性,3~9月龄,平均4.7月,体重5.8~8.7 kg,平均7.1 kg。出生后即诊断先天性肛门闭锁,并行近端乙状结肠(5例)或横结肠(4例)造口(外院手术4例)。均行瘘管造影及直肠MRI平扫检查,按Krichenbeck分类[7],诊断直肠膀胱颈瘘2例,直肠前列腺部尿道瘘2例,直肠尿道球部瘘5例。按Wingspread分类法[8],中位肛门闭锁5例,高位肛门闭锁4例。
病例选择标准:出生后诊断先天性肛门闭锁,并行近端乙状结肠或横结肠造口术,按Krichenbeck分类归于直肠尿道球部瘘、直肠前列腺部尿道瘘或直肠膀胱颈瘘,分别对应Wingspread分类法的中位和高位肛门闭锁。
1.2 手术步骤
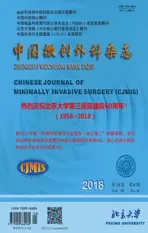
气管插管,全麻,仰卧位。患儿位于手术台尾侧,身体垫高,腹部、臀部、会阴部及双下肢消毒,无菌巾包裹下肢。采用三孔法,经脐放置12 mm trocar和30°腹腔镜,CO2气腹压力8~10 mm Hg(1 mm Hg=0.133 kPa),气体流量2.5~4.5 L/min。左、右侧上腹旁开脐孔约5.5 cm处分别置入2个5 mm da Vinci trocar(图1)。4号针头左下腹穿入腹腔作为排烟孔。将da Vinci机器人从患儿脚侧完成对接(图2)。术者左手持Maryland抓钳,右手持单极电凝。用电钩切开直肠两叶腹膜层,靠肠壁向远端游离,切开反折腹膜后,前壁和侧壁在直肠固有筋膜下游离(图3A),后壁紧贴直肠壁游离(图3B),向远端分离到瘘管逐渐变细,在末端靠近膀胱壁或尿道壁处切断瘘管(图3C),用5-0可吸收线8字缝合修补瘘口(图3D)。对于直肠尿道瘘,需要将膀胱颈部悬吊暴露盆底,便于在盆底深部游离和缝合。镜头保持直视盆底的状态,分开脂肪组织,显示两侧的骶骨尾骨肌腹,同时开始会阴部操作。在电刺激仪引导下找准肛门外括约肌收缩的中心,刺激肌肉的同时,在腹腔视野中清晰辨认肌肉收缩的中心。会阴部收缩中心纵行切开皮肤1.2 cm,用止血钳向盆底方向游离,镜头监视下从肛门括约肌和肛提肌中心进入腹腔(图3E)。扩张盆底隧道至14号扩肛器可顺利通过,将直肠从该隧道中拖出,检查明确肠管血运良好及肠管无张力。将左、右侧肠壁浆肌层与骶前筋膜各缝合一针固定。撤除机械臂、trocar,解除气腹,缝合trocar孔。肛门成形采用5-0可吸收线完成直肠与会阴皮肤的无张力吻合(图4)。
2 结果
9例均在机器人辅助下顺利完成肛门成形术。前6例在肛门成形术后2~4个月再行Ⅲ期结肠造口闭合术,后3例术中同时关闭造瘘口。肛门成形术时间平均116 min(105~130 min),其中人机对接时间(docking time,即开始置入trocar到完成调试的时间)平均42 min(35~50 min),操作台手术时间(time at console,即术者开始使用机器人系统操作到完成腔镜部分的时间)平均31.4 min(26~38 min)。术中直肠、瘘管分离层次清晰,视野干净,几乎无出血,无术中并发症。术后第2~3天开始进食,术后平均5.4 d(4~7 d)拔除尿管,10.2 d(7~14 d)出院。
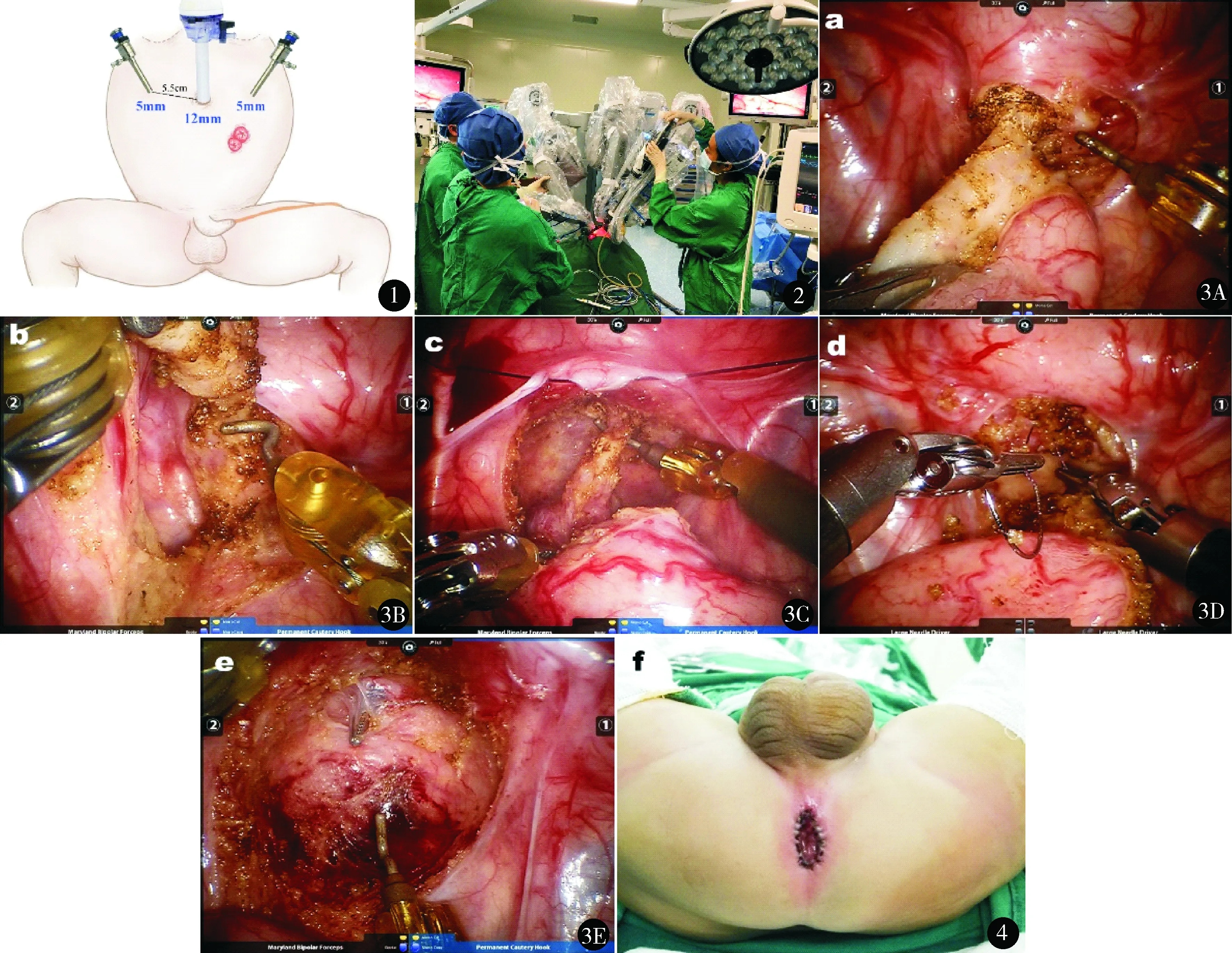
图1 trocar分布示意图 图2 机器人安装调试场景 图3 机器人腹腔内操作:A.在直肠固有筋膜下游离直肠前壁和侧壁;B.紧贴直肠游离后壁;C.悬吊膀胱,向远端分离到瘘管逐渐变细,在末端靠近膀胱壁、尿道壁处离断;D.用5-0可吸收线8字缝合修补瘘口;E.用止血钳向盆底方向游离,在镜头监视下从肛门括约肌和肛提肌中心入腹 图4 用5-0可吸收线完成直肠与会阴皮肤的无张力吻合
术后2~3周开始间断扩肛,时间3~6个月。术后平均随访10个月(6~15个月),采用李正等[9]肛门功能评分标准对排便功能进行评估,优6例(总分5~6分),良3例(总分3~4分,2例直肠膀胱瘘,1例直肠尿道瘘,这3例术前评估盆底肌群发育较差,随访至6个月肛管静息压均低于10 mm Hg,未见直肠肛门抑制反射,继续随访半年后污便逐渐好转,自主控便能力增强,污便频率控制在每周1~2次)。2例轻度肛门狭窄,自主排便困难,持续扩肛及药物调理3个月自主排便功能恢复正常(1~3次/天)。3例轻度黏膜脱垂,不影响排便。余4例未出现尿道瘘、肛门失禁、切口感染或黏膜脱垂等术后并发症,自主排便功能良好,会阴部对称,肛门位于肛门陷窝中心。
3 讨论
直肠尿道瘘是男性先天性肛门直肠畸形(anorectal malformations,ARM)最常见的肛门闭锁类型。按照Wingspread分类法[8],直肠膀胱瘘和前列腺部尿道瘘对应高位肛门闭锁,直肠尿道球部瘘对应中位肛门闭锁,是本组所选的病例类型。直肠膀胱瘘是唯一必须经腹腔入路才能完成修补的类型,而关于直肠前列腺尿道瘘和直肠尿道球部瘘的最佳术式,目前存在争议[10,11]。后矢状入路肛门成形术(posterior sagittal anorectoplasty,PSARP)是目前广泛应用于中、高位ARM的传统标准术式,该方法为了解决术后大便失禁的问题,从后矢状入路充分暴露直肠肌环和横纹肌复合体,保证直肠在直视下从肌环正中通过[1]。但对高位置的瘘口不易完成修补,广泛的组织创伤造成感染率较高,缝合重建后的肌肉瘢痕性愈合,造成的狭窄使得术后便秘发生率升高,切口瘢痕大。2000年Georgeson等[2]首次报道腹腔镜辅助肛门成形术(laparoscopically assisted anorectal pull-through,LAARP),此后腹腔镜手术逐渐成为治疗ARM的重要手术方式,随着腔镜技术不断发展,国内已有一期完成LAARP的报道[12]。该术式在直视下游离直肠盲端,从盆底横纹肌复合体中心拖出至肛门窝,对肠管及括约肌损伤小,兼具治疗周期短、手术创伤小、处理高位瘘管(直肠膀胱瘘)方便、术后便秘少等优点,术后排便功能等同或优于Pea手术[3,13~15],但在肛门闭锁合并直肠前列腺部尿道瘘和直肠尿道球部瘘的治疗方面存在技术难题。由于婴幼儿盆腔狭小,瘘管位置越低,意味着解剖部位越深,操作越困难。由于直肠盲端与尿道的特殊解剖关系,游离过少会导致尿道憩室形成,游离过度则担心尿道、神经等重要组织损伤;瘘口位置隐蔽,缝合不牢担心尿瘘。腔镜操作技术特别娴熟的医生,建议游离直肠末端时采用剥离黏膜的方式完成瘘管分离,然后翻转镜头方向完成瘘管缝合[14,16,17],但仍然不能完全避免并发症,且医生的人体工程学舒适度不佳。
目前关于机器人辅助肛门成形术的病例报道有2篇。2011年沙特阿拉伯Albassam等[18]首次报道5例应用da Vinci机器人辅助治疗中、高位ARM(2例尿道球部瘘,3例前列腺部尿道瘘),治疗原则与LAARP一致,平均手术时间3.56 h,无术中并发症,术后随访6~36个月,并发症包括1例尿道憩室、1例污便和1例直肠黏膜脱垂,均经保守治疗好转,无感染、肛门狭窄等并发症,肛门外观及位置良好。2016年西班牙Ruiz等[19]报道1例直肠尿道瘘的机器人手术。2位作者均提到机器人辅助手术具有优越的手眼协调性、精准性和灵巧性,减少在狭小空间内操作的困难,在ARM的手术操作中能够发挥重要优势。本文是中国第一篇关于机器人辅助肛门成形术的报道。
本中心从2015年底应用da Vinci机器人手术治疗小儿消化道畸形疾病[20],积累50例以上手术经验后开始应用于更小患儿(新生儿、婴幼儿)。本组9例平均4.7月龄,前6例分3期完成手术,后3例行机器人肛门成形术的同时完成还瘘手术,手术同样顺利、有效,治疗总疗程缩短。本组机器人辅助肛门成形术的手术时间平均116 min(105~130 min),操作台手术时间平均31.4 min(26~38 min)。张金山等[21]报道LAARP治疗30例ARM手术时间(151±40) min、侯文英等[22]报道LAARP治疗11例ARM的中位腔镜操作时间32.8 min(25~78 min),从手术时间来看,与常规腔镜手术相比,机器人手术应用于婴幼儿患者并没有表现出操作更繁琐。
da Vinci机器人手术系统提供三维立体、高清、放大(最高15倍)影像,术者手眼配合更协调,能够获得更为清晰和放大的视野,有利于对直肠及周围膜结构[23,24]解剖(Denonvilliers筋膜前层、Denonvilliers筋膜后层即直肠固有筋膜、骶前筋膜)进行更深入的认识和更清楚的辨认,为微创手术提供清晰的解剖平面,减少出血和并发症,从而获得更好的手术效果。为了完成分离瘘管,我们应用5 mm单极电钩游离直肠盲端及瘘管,前壁和侧壁在直肠固有筋膜(Denonvilliers筋膜后层)和直肠纵肌间游离,后壁紧贴直肠在直肠固有筋膜和骶前筋膜间分离,直到瘘管变细进入尿道部位。这样分离直肠和瘘管前壁时,远离位于Denonvilliers筋膜前层外围的血管以及排尿和性神经,最大限度保留排便、排尿或成年后的性功能[25,26]。后壁保留直肠固有筋膜,抗牵拉能力强,牵拉时不易破裂,有利于瘘管完整切除。同时,通过膀胱颈的悬吊和镜头的深入,在清晰放大的视野下轻松完成瘘口缝合。整个过程解剖层次分明,无可见出血。本组术后随访3例轻度污便、2例便秘及3例黏膜脱垂均为ARM术后常见并发症,与个体发育程度及疾病特点有关,随访中观察和保守治疗后可得到改善,近期手术效果满意。
目前不足的是,机器人手术费用较传统腹腔镜手术增加约13%[20],本组应用的Si型da Vinci机器人手术系统的设计基于成人[27],部分操作器械应用于婴幼儿太大。随着机器人和手术器械的不断改进,目前5 mm机器人trocar和器械已经在临床使用,未来为小儿量身设计的Xi型da Vinci机器人手术系统[28]可能使新生儿、婴幼儿手术成为常规。
总之,da Vinci机器人辅助肛门成形术治疗先天性肛门闭锁安全、可行,近期随访效果满意,尤其在瘘管分离、瘘口缝合和肌肉中心辨认方面优势明显。直肠固有筋膜下游离瘘管精细、清晰,外括约肌和神经得以保留完整。后期需要更大样本和术后功能长期随访结果验证。
2 Georgeson KE,Inge TH,Albanese CT.Laparoscopically assisted anorectal pull-through for high imperforate anus:a new technique.J Pediatr Surg,2000,35(6):927-930.
3 汤绍涛,曹国庆,童强松,等.腹腔镜下高位肛门闭锁肛门成形术及中期临床评估.中华小儿外科杂志,2011,32(7):509-514.
4 汤绍涛.腹腔镜辅助手术治疗先天性肛门直肠畸形.中华小儿外科杂志,2014,35(6):466-469.
5 Meehan JJ,Sandler A.Pediatric robotic surgery:a single-institutional review of the first 100 consecutive cases.Surg Endosc,2008,22(1):177-182.
6 Sinha CK,Haddad M.Robot-assisted surgery in children:current status.J Robot Surg,2008,1(4):243-246.
7 Holschneider A,Hutson J,Pea A,et al.Preliminary report on the international conference for the development of standards for the treatment of anorectal malformations.J Pediatr Surg,2005,40(10):1521-1526.
8 Stephens FD,Smith ED.Classification,identification,and assessment of surgical treatment of anorectal anomalies.Pediatr Surg Int,1986,1(1):200-205.
9 李 正,王练英,王维林,等. 先天性无肛术后远期排便功能综合评定. 中华小儿外科杂志,1990,11(5):283-285.
10 De Vos C,Arnold M,Sidler D,et al.A comparison of laparoscopic-assisted (LAARP) and posterior sagittal (PSARP) anorectoplasty in the outcome of intermediate and high anorectal malformations.S Afr J Surg,2011,49(1):39-43.
11 Kimura O,Iwai N,Sasaki Y,et al.Laparoscopic versus open abdominoperineal rectoplasty for infants with high-type anorectal malformation.J Pediatr Surg,2010,45(12):2390-2393.
12 Diao M,Li L,Ye M,et al.Congenital anomaly rectified at birth:one-stage single-incision laparoscopic-assisted anorectoplasty for newborns with anorectal malformations and recto-urethral fistula.Surg Endosc,2016,30(11):5156-5164.
13 Yang J,Zhang W,Feng J,et al.Comparison of clinical outcomes and anorectal manometry in patients with congenital anorectal malformations treated with posterior sagittal anorectoplasty and laparoscopically assisted anorectal pull through.J Pediatr Surg,2009,44(12):2380-2383.
14 Ming AX,Li L,Diao M,et al.Long term outcomes of laparoscopic-assisted anorectoplasty:a comparison study with posterior sagittal anorectoplasty.J Pediatr Surg,2014,49(4):560-563.
15 Yazaki Y,Koga H,Ochi T,et al.Surgical management of recto-prostatic and recto-bulbar anorectal malformations.Pediatr Surg Int,2016,32(10):939-944.
16 Srimurthy KR,Ramesh S,Shankar G,et al.Technical modifications of laparoscopically assisted anorectal pull-through for anorectal malformations.J Laparoendosc Adv Surg Tech A,2008,18(2):340-343.
17 Diao M,Li L,Guan KP,et al.A novel laparoscopic technique for anorectal malformation with low recto-bulbar fistulae.Surg Endosc,2017,31(10):4326-4330.
18 Albassam A,Gado A,Mallick MS,et al.Robotic-assisted anorectal pull-through for anorectal malformations.J Pediatr Surg,2011,46(9):1794-1797.
19 Ruiz MR,Kalfa N,Allal H.Advantages of robot-assisted surgery in anorectal malformations:report of a case.J Minim Access Surg,2016,12(2):176-178.
20 张 茜,汤绍涛,曹国庆,等.da Vinci机器人辅助腹腔镜Soave拖出术治疗先天性巨结肠症.中国微创外科杂志,2016,16(2):165-167,184.
21 张金山,李 龙,刁 美,等.经脐单切口腹腔镜辅助肛门成形术治疗小儿中高位肛门闭锁.中国微创外科杂志,2016,16(5):424-427.
22 侯文英,李 龙,刘树立,等.腹腔镜辅助中位肛门闭锁成形术11例报告.中国微创外科杂志,2007,7(5):439-441.
23 Muraoka K,Takenaka A.New findings of clinical anatomy in pelvis.Nihon Rinsho,2016,74(1):66-71.
24 高 炜,张雪宁,郭 志,等.Denonvilliers筋膜的应用解剖学研究进展.中国临床解剖学杂志,2016,34(1):111-114.
25 Wei HB,Fang JF,Zheng ZH,et al.Effect of preservation of Denonvilliers’ fascia during laparoscopic resection for mid-low rectal cancer on protection of male urinary and sexual functions.Medicine (Baltimore),2016,95(24):e3925.
26 苏松盛,何进达,曾凡英.腹腔镜直肠癌术中保留Denonvilliers筋膜对中青年男性排尿及性功能影响.中华普外科手术学杂志(电子版),2017,11(2):140-143.
27 Ozben V,Cengiz TB,Atasoy D,et al.Is da Vinci Xi better than da Vinci Si in robotic rectal cancer surgery? Comparison of the 2 generations of da Vinci Systems.Surg Laparosc Endosc Percutan Tech,2016,26(5):417-423.
28 Morelli L,Di Franco G,Guadagni S,et al.Robot-assisted total mesorectal excision for rectal cancer:case-matched comparison of short-term surgical and functional outcomes between the da Vinci Xi and Si.Surg Endosc,2018,32(2):589-600.