IR-TRACC传感器位移计算及标定方法
2018-06-15习波波李月明周大永顾鹏云
习波波,李月明,韩 刚,周大永,顾鹏云
(浙江吉利汽车研究院有限公司,杭州 311228)
WorldSID假人主要用于评估汽车乘员在侧面碰撞试验中产生伤害的程度。Euro NCAP及U.S.NCAP(2019年实施)中侧面可变形碰撞或侧撞中规定在前排驾驶员侧放置WorldSID假人,以评估假人的伤害程度。在国内,随着2018版C-NCAP法规的颁布,侧面碰撞试验中驾驶员位置ES-2假人被World SID假人替代,而ES-2假人位移与World SID假人位移传感器使用的计算及标定方法差异较大,主要差异在于World SID假人使用IR-TRACC传感器,位移计算不仅需考虑压缩量,还需考虑压缩偏转角度[1-2]。
因此,应尽快针对World SID假人传感器IRTRACC使用的计算及标定方法等方面进行研究。IR-TRACC传感器主要用于采集假人肩部、胸部肋骨及腹部的压缩量,而上述部位是评价乘员受伤害程度的重要评价指标。本文对IR-TRACC使用的计算及标定方法进行了研究。
1 IR-TRACC传感器安装及原理
如图1所示,World SID假人内部6处装有IR-TRACC传感器分别用来测量肩部、胸部肋骨及腹部压缩位移量[3]。IR-TRACC传感器利用红外激光的平方反比定律(一个关于光源照度与被照射物体之间距离关系的定律),传感器利用该定律可以换算出假人在侧面碰撞试验过程中所测量部位位移的变化量,此外,利用该原理设计的传感器,对横向位移偏移量需限定在某值内,才能保证轴向位移测量的准确度。
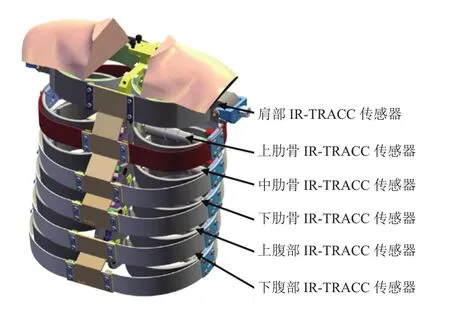
图1 World SID假人内部IR-TRACC传感器布置
2 IR-TRACC传感器计算方法
目前,部分工程师对World SID假人内部位移的使用还存在偏差,有的直接把假人采集到的位移量当成假人实际压缩位移量,有的在假人的位移换算过程中对初始位置定义存在较大偏差。为明确World SID假人内部IR-TRACC传感器的使用,对World SID假人位移换算进行了如下研究。
World SID假人内部IR-TRACC传感器在侧面碰撞过程中,沿y轴方向产生轴向压缩位移,同时,绕z轴有一定的偏转角度,这与侧碰假人在实际侧面碰撞过程中的运动是一致的[4],传感器采集的数据更接近于假人实际伤害,具体运动过程如图2所示。
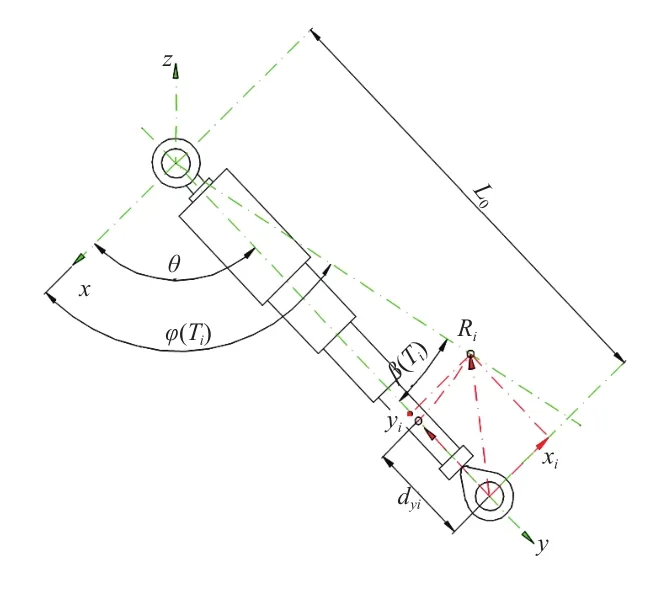
图2 IR-TRACC传感器位移计算示意图
目前,在计算World SID假人内部位移时,大多数直接以y轴为起始轴,默认传感器安装轴向与x轴垂直(即θ角为90°),并使用采集的偏转角度β(Ti)代入位移换算。但是,在实际安装过程中,并不能保证安装角度与x轴垂直,换算后的位移与实际位移存在一定偏差。为提高IR-TRACC传感器的测量精度,考虑传感器初始安装位置的不一致性,以x轴为计算起始轴,即以φ(Ti)作为偏转角度。
碰撞结束后,IR-TRACC传感器由初始安装位置偏转至Ri位置,此时,World SID假人肩部、肋骨或腹部实际压缩位移为Yi,传感器压缩过程几何参数见表1。
IR-TRACC传感器可采集到Ti时刻位移变化量dyi及Ti时刻偏转角度φ(Ti),通过图2所示的IR-TRACC传感器位移在侧面碰撞过程中的相对运动几何原理,利用三角形定理,可得出以下公式:
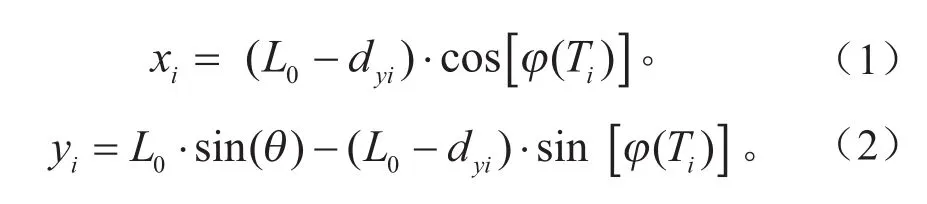
式(1)中的xi为Ti时刻横向偏移量,式(2)中的yi为Ti时刻轴向实际偏移位移量。其中yi的值为评价World SID假人在碰撞过程中肩部、肋骨及腹部的实际位移压缩量。由式(2)可知,yi的影响因子有L0、dyi及φ(Ti),其中dyi、φ(Ti)因每一款车本身结构及约束系统不同而不同,而影响dyi值的变化与IR-TRACC传感器的灵敏度相关。在多次侧面碰撞试验中,假人肩部、胸部及腹部肋骨在多次试验的冲击中,传感器初始安装角度θ及传感器的灵敏度值发生变化,影响输出结果精度,需对传感器重新标定。

表1 IR-TRACC传感器位移计算参数表
3 IR-TRACC传感器标定方法研究
目前,国内针对IR-TRACC传感器使用的标定设备只能实现在轴向方向的标定,但由于IRTRACC传感器的特殊性,需要对传感器横向位移进行标定。只有横向位移满足要求,才能保证传感器轴向方向上的采集精度。本研究设计了一种既能方便简单地实现横向位移标定,还能高精度地完成轴向位移标定的设备。
此外,对于传感器灵敏度标定系数的计算方法也存在较多版本,本文运用指数函数、最小二乘法拟合以及单变量求解法,得到较高精度的传感器灵敏度标定系数。
3.1 IR-TRACC传感器轴向位移标定研究
3.1.1 传感器轴向位移标定方法确定
World SID假人在侧面碰撞过程中,假人有压缩和回弹过程。因此,在标定传感器轴向时,需要考虑传感器压缩过程及向外拉伸过程,在标定过程中分别对传感器压缩及拉伸两个方向进行标定。
当前采集系统的激励电压为5 V,在IR-TRACC传感器标定过程中,外部给予5 V激励电压,按一定压缩量记录各个标定点输出的电压,传感器输出电压的一组数值可表示为Vn。
按同样的方法,以相同间隔向外拉伸直至标定最大量程,可分别记录各个标定点的位置,传感器输出电压的一组数值可表示为Vn'。
3.1.2 传感器轴向位移灵敏度标定系数确定
目前,对传感器灵敏度标定系数的拟合有多种算法,有使用一般线性拟合,有使用多项式拟合等算法,但使用上述方法求得的灵敏度标定系数去拟合曲线,其曲线拟合度普遍不高。
为提高曲线拟合度,利用指数函数、最小二乘法拟合曲线以及单变量求解法,得到标定后的传感器灵敏度系数,具体计算方法如下。
对传感器压缩及拉伸各个标定点的原始数据,求得一组平均值为an。

利用下列公式对各标定位置计算标定位移Dn,单位为mm。

式中:a为变量;m为标定系数,mm/V;b为截距,mm。
令Xn=,则式(4)可表示为:
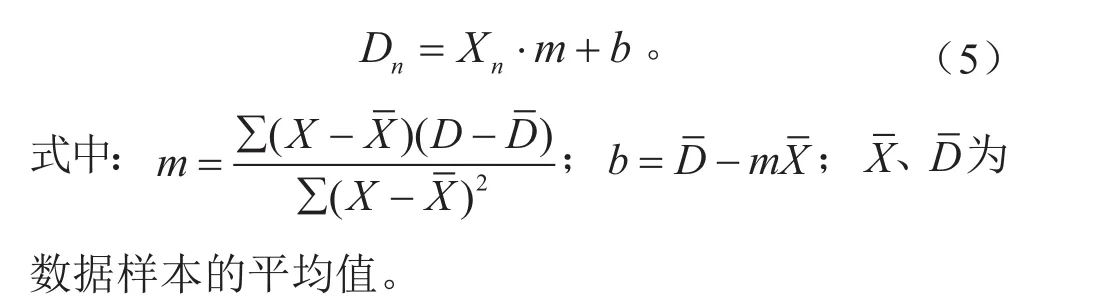
根据最小二乘法来判定数据的最佳拟合,在Excel中可利用函数LINEST来获得现有数据的最佳拟合直线,通过LINEST函数可以求解到截距b及标定系数m。数据的离散程度决定了 LINEST 函数计算直线的精确度,数据越接近线性,LINEST模型就越精确。 LINEST 函数使用最小二乘法来判定数据的最佳拟合。
为获得数据的最佳拟合曲线,计算各个标定点参考位移值与计算后得到的位移值Dn的最大非线性误差(即线性度δL)。利用Excel中单变量求解,以δL为目标变量,目标值为0,式(4)中a为变量,不断迭代计算,寻找最优解(即求各标定点对应的非线性误差δL的最小值),δL的最小值越接近于0,求解结果越优。
式中δ :=为×1各0δ0个%=标 定n点× 参考值与计算得到的位移YYY=Y值 差的F⋅ S绝 对;F⋅S为传感器满量程输出,F⋅SYmax-Y0。
3.2 IR-TRACC传感器横向位移标定方法确定
IR-TRACC传感器利用红外激光的平方反比定律,利用该原理设计的传感器,横向位移偏移量需限定在某值范围内才能保证轴向位移测量的准确度。考虑到IR-TRACC传感器的伸缩式圆筒状,在4个不同方向上标定横向位移即可。
在轴向位置为0处,分别在4个方向上得到传感器输出电压,利用上述传感器标定系数,求得传感器在横向4个方向上轴向位移变化量,如小于传感器轴向位移最大偏移量要求,则认定传感器横向位移标定满足要求。
3.3 IR-TRACC传感器标定装置
根据上文的分析可知,IR-TRACC传感器的灵敏度系数标定,不仅需考虑到轴向位移标定,还需对横向位移进行标定,因此,标定装置既要完成轴向位移标定,还要实现横向位移标定,且要求标定精度较高。
为获得精确的灵敏度标定系数,设计了一种专用于标定IR-TRACC传感器的标定装置,标定装置主要用于标定World SID假人内部IR-TRACC传感器灵敏度系数,可对传感器的轴向位移或横向位移进行标定。IR-TRACC传感器标定装置如图3所示,包括:侧向位移标定架、IR-TRACC传感器、可移动安装台、固定安装台、刻度尺、数显游标卡尺、滑轨、标定平台、高精度电压计(小数点后4位)及激励电压。
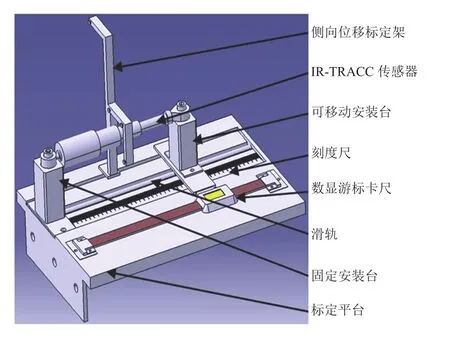
图3 WorldSID假人IR-TRACC传感器标定装置
3.3.1 轴向位移标定过程
IR-TRACC传感器属于精密仪器,需要在特定温度及湿度环境下进行标定。
在传感器压缩至轴向位置为0处(此时将游标卡尺置零),将最大量程分成若干等份并以每等份拉伸直至最大量程处,游标卡尺随可移动安装台移动,记录拉伸过程各个标定点的输出电压值。
同样,按上述过程在传感器最大量程处分别以相同等距离压缩,记录压缩过程各个标定点的输出电压值。将上述两组在各个标定点的电压值求平均值,作为标定传感器灵敏度系数的输入。
3.3.2 横向位移标定过程
本文设计了独特的标定方式对传感器进行横向位移标定,利用4个定滑轮分别实现传感器在横向4个方向上的标定,具体标定过程如图4 所示。
在轴向位移为0位置处,通过定滑轮分别在4个不同的方向上以0.45 kg的重物拉伸绕线,具体操作如图4所示。记录电压计在轴向位移为0位置处,横向位移在4个不同方向上采集到的传感器输出电压值。
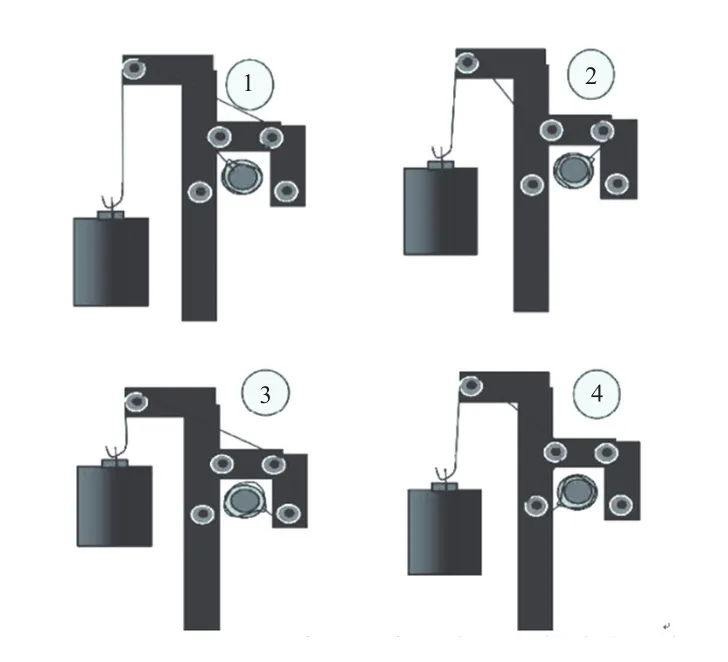
图4 IR-TRACC传感器4个方向上的横向位移标定
4 结论
本文研究了World SID假人内IR-TRACC传感器位移计算及标定方法,对IR-TRACC传感器的工作原理、位移计算及标定方法进行了详细分析和研究,得出以下结论:(1)WorldSID假人内部IRTRACC传感器结构复杂,在评估假人伤害时,需要重新对传感器进行位移换算,此外,传感器标定计算方法复杂,利用最小二乘法及单变量求解算法得到最优灵敏度标定系数。(2)巧妙地设计了一种能同时满足传感器横向位移及轴向位移的标定装置,为获得最优灵敏度标定系数提供了硬件支持。(3)传感器标定过程中,原始标定数据样本越多越容易得到最优解,即曲线拟合的最大非线性误差越小。
[1] 颜燕,张龙,朱西产.汽车侧面碰撞法规的研究与分析[J].上海汽车,2005(12):36-40.YAN Yan,ZHANG Long,ZHU Xichan.Research and Analysis of Vehicle Side Collision Regulations [J].Shanghai Auto,2005(12):36-40.(in Chinese)
[2] 李丽,朱西产,马志雄. 基于Madymo的World SID与ES2假人性能比较[J].佳木斯大学学报(自然科学版),2013,31(6):822-828.LI Li,ZHU Xichan,MA Zhixiong. Comparison of World SID and ES2’s Performance Based on Madymo[J].Journal of Jiamusi University(Natural Science Edition),2013,31(6):822-828.(in Chinese)
[3] W50-9900,User Manual WorldSID 50th[Z].
[4] 吴时兵.汽车侧碰假人力学性能分析及其标定系统开发[D].长沙:湖南大学,2007.WU Shibing. Mechanical Performance Analysis and Calibration System Development of Vehicle Side Impact Dummy[D]. Changsha:Hunan University,2007.(in Chinese)
