曲柄摇杆与正弦机构串联机构的虚拟仿真研究
2018-06-14柴文滔关慷慨
张 彭,柴文滔,关慷慨,陈 雪,吕 硕
(北华大学 机械工程学院,吉林 吉林 132021)
随着科技的发展和社会的进步,机械系统朝着多回路以及带控制系统的方向发展,从而使得机构的种类愈加多样化,例如,机械系统中不同机构之间的配合使得机器正常运转等现象.因此,机构的整合显得尤为重要.在机械机构中,杆类机构属于最基础的典型机构,而曲柄摇杆与正弦机构串联机构则是由杆机构组合演化而来,为了减轻机构实际工作的负担,得到精准的数据结果,因而在ADAMS中建立参数化模型并仿真,得到运动模型及输出曲线结果,辅以数据的后处理,这样做则减少了大量的人工计算时间成本和机构强度的校核,提高了机械结构的设计效率[1].
1 曲柄摇杆与正弦机构串联机构的数学建模
图1是曲柄摇杆与正弦机构串联机构简化的机构模型.虽然曲柄摇杆与正弦机构串联机构是由两种机构组合而成,但是究其根本还是由曲柄摇杆机构提供动力,所以首先对曲柄摇杆机构进行建模分析.取机架4和曲柄1铰接处A为坐标原点,机架为X轴建立坐标系,在其中任意位置时,组成的封闭四边形几何关系为
L1+L2=L3+L4
(1)
分别对各轴投影,即得
L1cosφ1+L2cosφ2=L3cosφ3+L4.L1sinφ1+L2sinφ2=L3sinφ3
(2)
延长DC至E点使得DE=2DC,取适当长度杆4和杆5并使E点为4的中点,完成数学建模分析过程[2,3].

图1 曲柄摇杆与正弦机构串联机构
2 曲柄摇杆与正弦机构串联机构三维设计
曲柄摇杆与正弦机构串联机构是由曲柄摇杆机构和正弦机构结合在一起的组合机构,模型根据需要的不同可以设置不同的参数用以适应实际的问题,首先进行机构的参数化建模,建立(0,-150,0),(-150,-100,0),(300,-100,0),(150,100,0),(0,250,0),(0,0,0),(0,450,0),(-550,450,0),(550,450,0)八个Marker点.并按一定的顺序连接起来,设定所建立的杆的宽和高分别为4.0 cm,机架AD是ADAMS自动创建在(ground)大地上的零件.在A、B、C、D、E和杆5处添加运动副,并把转动驱动放置在A处,完成三维模型的建立.

图2 曲柄摇杆与正弦机构串联机构的三维设计
3 曲柄摇杆与正弦机构串联机构的运动分析
在完成建模并添加相应的运动副的基础上,对曲柄摇杆与正弦机构串联机构进行运动仿真并进入到运动仿真后处理界面.首先分析杆1和杆3的情况,由于主动力添加到杆1上,因此杆1在本机构中作匀速圆周运动,角加速度为0,但由于实际情况中会存在相应的阻碍,因此其角加速度会产生一定范围性的浮动,但最终趋于稳定[4,5].
而对于杆3,由于存在急回特性,因此杆2与杆1共线的时候,杆3的角加速度会有一个急速的上升或下降.图3是杆3的角加速度曲线图.
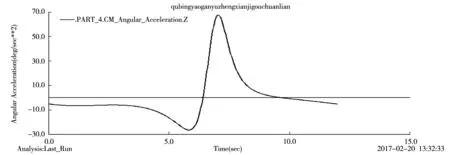
图3 杆3的角加速度
由图3可以看出,在5.5~7 s时杆3出现了角加速度急速转变的过程,当机构存在极位夹角θ时,机构便具有急回特性,θ角越大,K值越大,机构的急回特性也越显著.θ和K的关系如公式(3)(4)所示.
θ=180°(K-1)/(K+1)
(3)
K=(360°-φ1)α1/(360°-α1)φ1
(4)
滑块4的运动情况依据杆3而定,由于杆3具有急回特性,因此滑块4的运动情况也会有一段急速上升和下降的趋势,但是对于无急回特性的情况则无此特点.图4是滑块4的角加速度曲图.

图4 滑块4垂直移动时的加速度
由图4可以看出,滑块4的角加速度走向随杆3角加速度改变而改变.利用曲柄摇杆具有急回特性这一特点配合滑块使之达到循环运动的目的[6,7].
由于滑块4在杆5上相对运动,因此杆5的运动情况则由滑块4的运动情况保持一致.图5是杆5水平移动时的加速度曲线图.

图5 杆5移动时的加速度
滑块4与杆5在水平方向固连,因此滑块4由杆3急回特性所带动的运动可分解为水平方向的速度与竖直方向的速度,杆4水平方向的速度与杆5相同,此机构将杆1处的旋转运动转换成杆5处水平方向上往复运动的输出.对于平面连杆的急回特性在生活和工程中也有许多实际上的应用,如牛头刨床为了实现刨削运动特性以及缩短空回行程时间,一般会设计为摆动导杆机构配合摇杆滑块机构,满足其对急回特性的需求[8-10].
4 结 论
(1) 曲柄摇杆与正弦机构串联机构由两种机构搭建而成,同时也保留了各个机构的优点,避免了机构形式的单一性,极大程度的扩展机构的运动形式,使机构的功能多样化.
以ADAMS参数化建立曲柄摇杆与正弦机构串联机构,可以根据实际需要更改点集用来改变杆的长短,同时还可以设定杆的质量和材料,根据不同的需求更改不同的参数,减少不必要的资源与经济浪费,提高工作效率.
(2) ADAMS中的曲线输出可以得到需要的数据曲线,不必需要大量的人工计算和实验设置,同时还可以根据曲线的输出来适当的更改机构的运动情况,减小功能的损耗.同时ADAMS中的后处理输出曲线可以转化为数据,这样可以更加直观的观察和分析机构的运动情况.
曲柄摇杆与正弦机构串联机构由两种机构搭建而成,同时也保留了各个机构的优点,避免了机构形式的单一性,极大程度的扩展机构的运动形式,使机构的功能多样化.
[1] 宋少云,尹芳.ADAMS在机械设计中的应用[M].北京:国防工业出版社,2015.
[2] 高光娣.典型机械结构ADAMS仿真应用[M].北京:电子工业出版社,2013.
[3] 李增刚.ADAMS入门详解与实例[M].2版,北京:国防工业出版社,2014.
[4] 刘晓敏,张金涛,等.速无冲击直线往复运动机构研究[J].吉林化工学院学报,2015,8(8):44-45.
[5] 刘维维,成凯.非公路矿用宽体自卸车稳态回转性能仿真分析[J].吉林化工学院学报,2017(5):43-44.
[6] 宋继忠.运用ADAMS实现四杆机构的仿真[J].工业博览,2005,3(12):128-130.
[7] 武艳慧.ADAMS在机械原理机构课程教学中的应用[J].内蒙古石油化工,2010,2(15):89-90.
[8] 熊劲松.平面四杆机构急回特性研究[J].自动化应用,2013(7):12-13.
[9] 吴明远,杨挺.具有急回特性曲柄摇杆机构的解析综合[J].拖拉机与农用运输机,2008,35(4):68-69.
[10] 边巍.平面四杆机构急回特性分析[J].机械工程师,2010(9):52-53