一种新型家用太阳能交流电源的设计
2018-06-07孙春虎
孙春虎 王 静 凌 景
(巢湖学院机械与电子工程学院 安徽巢湖 238000)
一、太阳能交流电源原理
太阳能交流电源原理[1]框图如图1所示。
太阳能交流电源主要由太阳能板、DC/DC电路、充电电路、控制电路、48V蓄电池、48V逆变器组成。
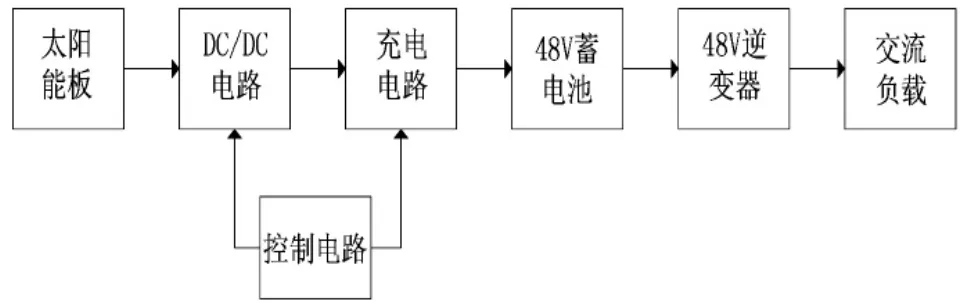
图1 太阳能交流电源原理框图
DC/DC电路的作用是实现太阳能板的最大功率输出;充电电路的作用是给48V的蓄电池充电;控制电路实现对DC/DC电路和充电电路的驱动控制;48V逆变器的主要作用是将48V直流电逆变成220V交流电。
由图原理可知:白天时,蓄电池可以一边充电,一边对交流负载放电;晚上时,蓄电池可以带交流负载,也可以不经48V逆变器,直接带直流负载。可见,该太阳能交流电源不像普通的太阳能电源只能白天充电,晚上放电。
二、太阳能交流电源硬件设计
太阳能交流电源硬件设计主要包括:DC/DC电路设计、充电电路设计、控制电路设计以及48V逆变器设计。
(一)DC/DC电路设计。本文选用的太阳能板为200W,额定工作电压36.1V,额定工作电流5.58A。DC/DC电路设计的主要目的是使太阳能板能实时的最大功率输出。
常用的DC/DC电路为Boost电路[2]和Buck电路,由于Boost较Buck电路具有转换效率高、能提升电压、受占空比影响小等优点[3],实际应用中以Boost电路居多。Boost电路如图2所示。
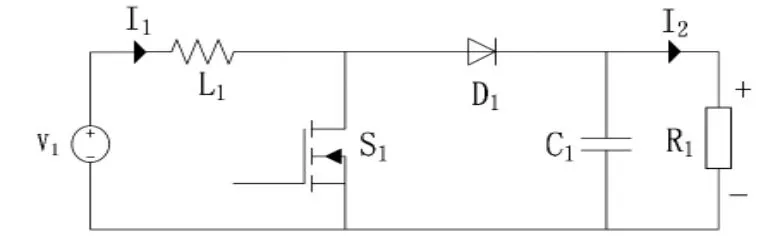
图2 Boost电路原理图
最大功率点跟踪常用的方法有增量电导法、干扰观察法和占空比扰动法。由于前两种控制方法都较复杂,本文采用改进的占空比扰动法,即:变步长的占空比扰动法。当dP/dD大于0且很大时,大步长占空比扰动;当dP/dD大于0且很小时,小步长占空比扰动。
由于一般最大功率点出现在占空比D大于0.5的范围内,因而初始占空比可设置为0.5,这样可以大大提高跟踪的快速性和精确性。直接以占空比作为控制参数,从而大大简化了控制系统的设计。
太阳能板正常工作时输出为36V,最大功率点占空比大于0.5,故Boost电路输出电压大于72V,故可给60V及以下的蓄电池充电。
(二)充电电路设计。常规的蓄电池充电方法采用三段式:恒流阶段、恒压阶段、浮充阶段,但是这种充电方法较慢。本文采用了一种新的三段恒流充电方法,即:大电流阶段、小电流阶段、浮充电流阶段。
传统的充电电路主电路采用AC/DC/AC/DC的组合形式,借助复杂的模拟控制系统实现恒流、恒压充电,充电电路复杂,为此,本文提出了一种新型的Buck恒流充电电路,如图3所示,由该电路输入、输出关系可得到公式(1)。

式中:V2—Buck电路输入电压;
D—开关S2的占空比;
E—蓄电池电压;
I—蓄电池充电电流;
R—蓄电池充电回路总电阻。由公式(1)知:即使R、E、V2变化,但只要选择合适的占空比D即可保持以恒定的电流I充电,这就是恒流充电的基本原理。
太阳能板正常工作时,Boost电路的输出电压为72V,采用Buck电路给蓄电池充电时,考虑到压降,蓄电池的电压规格只能是48V及以下,本文蓄电池采用4节12V/100AH的容量规格。充电策略如下:第一阶段采用10A的恒流充电;当蓄电池电压大于50V时进入第二阶段的5A的恒流充电;当蓄电池电压大于53V时进入第三阶段的1A的浮充恒流充电。

图3 Buck恒流充电电路
(三)控制电路设计。控制电路的主要功能是实现Boost电路的MPPT跟踪控制和Buck电路的三段恒流充电控制。为了满足控制的实时性、精确性这里选用美国TI公司的16位低功耗单片机MSP430F149[4]。MSP430F149有两个16位的定时器A和B,通过比较器可分别产生2路和6路PWM波。
本文利用定时器A产生2路PWM波,一路用于控制Boost电路,另一路用于控制Buck电路。定时器A中的TACCRO设置PWM波的频率;TACCR1和TACCR2分别设置Boost电路和Buck电路的占空比;TACCTL1和TACCTL2设置两路PWM波的输出方式,通常为7;TACTL设置定时器A四种计数方式,通常为方式1。控制电路如图4所示。
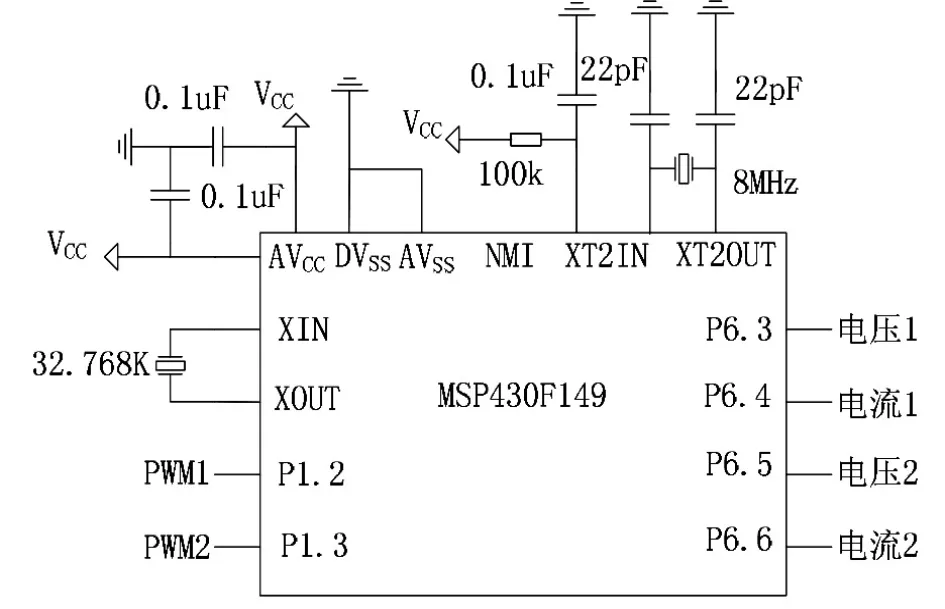
图4 MSP430F149控制电路图
由图4可知:利用P1.2、P1.3口产生PWM1、PWM2分别控制Boost电路和Buck电路;P6.3~P6.6口为4路12位的模拟信号采样口;P6.3、P6.4口实现MPPT跟踪控制;P6.5、P6.6口实现三段恒流充电控制,4路模拟信号由4个霍尔传感器采样而来,这里不再详述。
(四)48V逆变器设计。通常单相逆变器直流侧电压理论最小值为311V,若考虑调制比,实际电压至少在350V以上,本设计选定为380V。显然蓄电池的48V电压需要先升到380V,然后才能进行逆变输出。
直流升压电路的拓扑结构有Boost电路、双管正励变换器、推挽电路。Boost电路由于效率受到占空比的影响,占空比越大,效率越低,因而通常电压增益小于5;双管正励变换器由于变压器磁通只能在单方向变化,故体积较大且整流输出电压和电流的脉动大、输出端滤波器的体积大;推挽电路很好的克服了以上缺点。
本文采用推挽电路,推挽电路如图5所示。该升压控制电路以SG3525[5]为核心,产生2路带死区的PWM波,经TLP250驱动实现推挽电路的380V升压控制。
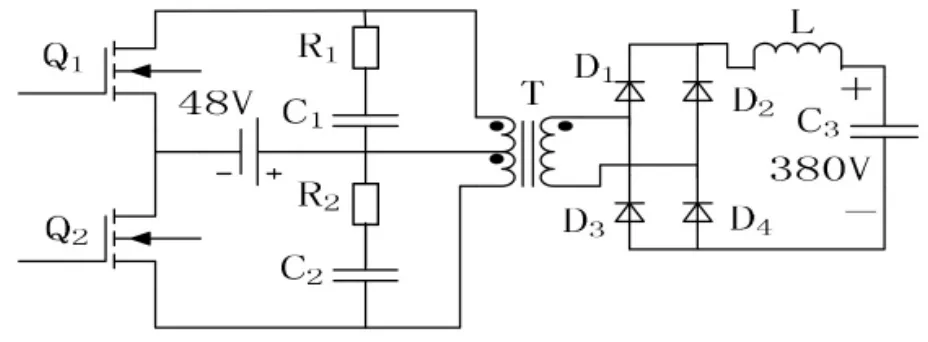
图5 推挽式直流升压变换器
逆变输出电路采用全桥变换器,如图6所示。控制系统以双极性的SPWM集成控制芯片TDS2285[6]为控制核心,利用其外围电路产生2路SPWM波,经过非门、RC电路、与非门形成带死区的4路PWM波,最后通过4个TLP250驱动电路驱动全桥逆变,产生220V交流电。
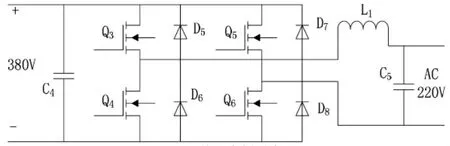
图6 单相全桥逆变器
三、太阳能交流电源软件设计
太阳能交流电源软件设计目标是实现Boost电路MPPT跟踪和Buck电路恒流充电控制,因而软件设计包括:改进的MPPT占空比扰动法程序设计、Buck恒流充电程序设计、PWM波程序设计。
(一)改进的MPPT占空比扰动法程序设计。常规的占空比扰动法以爬坡形式寻找最大功率点,因而寻找过程较慢;寻找过程中以固定的占空比步长寻找,若步长较大则会导致跟踪误差较大,若步长较小又会造成跟踪速度较慢,当外界环境变化较快时将无法实现MPPT的跟踪。
由于一般最大功率点出现在占空比D大于0.5的范围内,因而可将初始占空比设为0.5,这样可以加速MPPT跟踪的速度。改进的占空比扰动法流程图如图7所示,它采用变步长形式跟踪最大功率点,且每次保存D(k)、p(k)、D(k+1)值。算法如下:当Δp(k)/ΔD(k)绝对值大于λ时,以大步长λ2跟踪;当Δp(k)/ΔD(k)绝对值小于λ时,以小步长λ1跟踪[7]。
MSP430F149单片机根据D(k+1)产生1路PWM信号,从而实现Boost电路的MPPT跟踪。
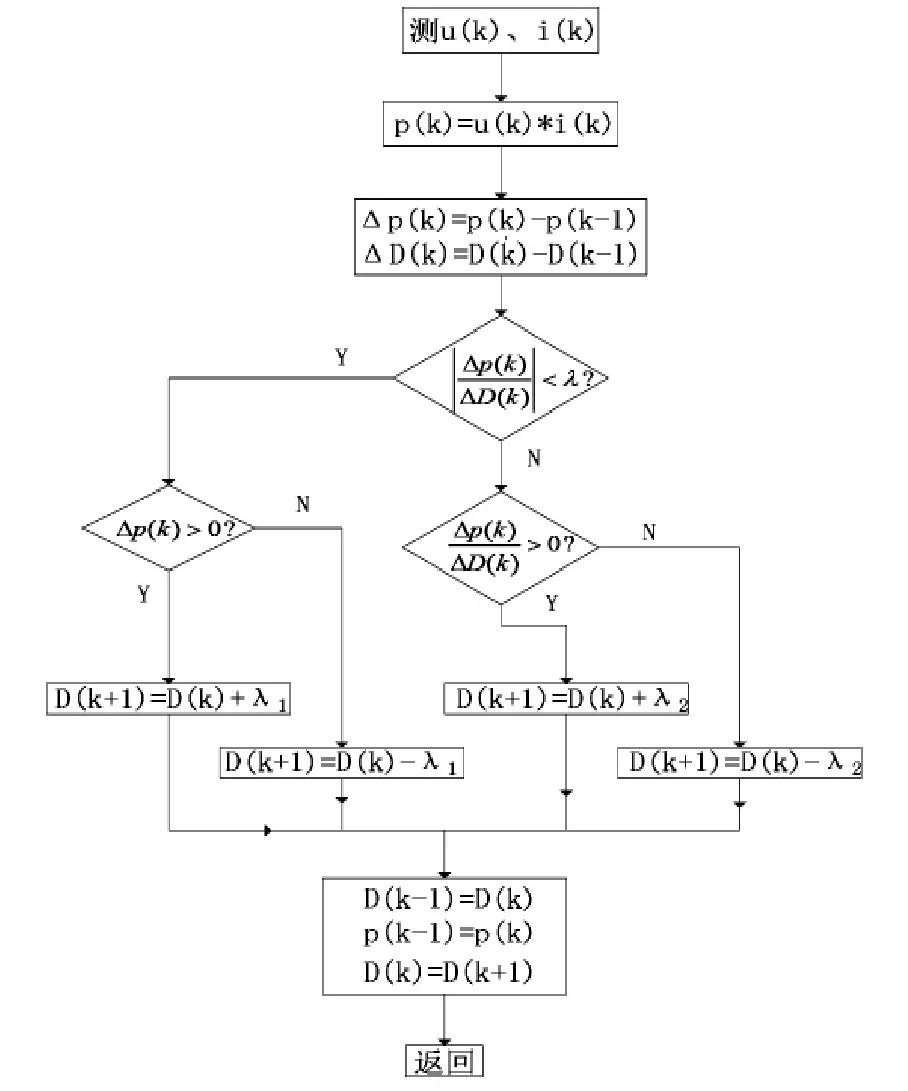
图7 改进的占空比扰动法流程图
(二)Buck恒流充电程序设计。Buck恒流充电程序流程图如图8所示,首先测量蓄电池电压,若电压小于50V,则以10A的电流恒流充电;若电压在50V和53V之间,则以5A的电流恒流充电;若电压大于53V,则以1A的电流恒流充电。
流程图利用数字PID对电流误差进行运算得出占空比控制量D2,MSP430F149单片机再根据D2产生1路PWM波驱动Buck电路,以实现三段恒流充电控制。
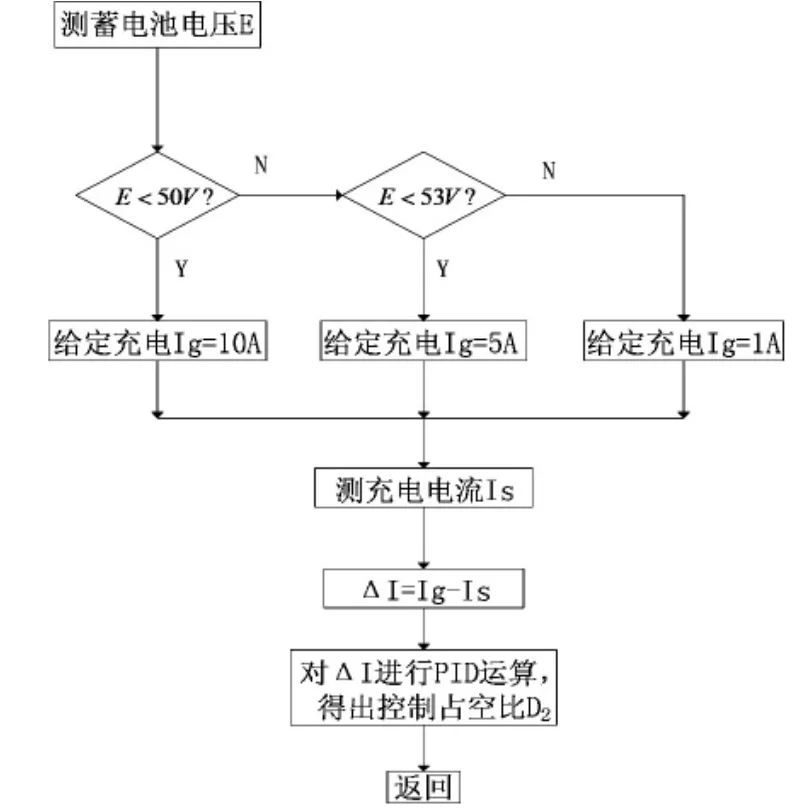
图8 Buck恒流充电流程图
(三)PWM波程序设计。本系统利用定时器A在脚P1.2、脚P1.3产生2路PWM信号分别驱动Boost电路和Buck电路。设D1、D2分别为某一时刻Boost电路和Buck电路所需控制的占空比,PWM波程序流程图如图9所示。
P1SEL、P1DIR设置脚P1.2、脚P1.3为PWM输出口;OUTMOD_7为PWM输出模式7;FACTL设置定时器计数模式为增加模式;TACCR0设置 PWM波频率;TACCR1、TACCR2设置占空比。

图9 PWM程序流程图
四、结语
该太阳能交流电源白天、晚上都能放电,满足了白天的用电需求;MPPT跟踪速度与精度有所提高;Buck恒流充电电路简化了充电电路设计、效率高、可靠性高;具有一定的参考与应用价值。
[1]黄汉云.太阳能光伏发电应用原理[M].北京:化学工业出版社,2013.
[2]陈坚.电力电子学——电力电子变换和控制技术[M].北京:高等教育出版社,2004.
[3]王厦楠.独立光伏发电系统及其MPPT的研究[D].南京:南京航空航天大学,2008.
[4]谢楷.MSP430系列单片机系统工程设计与实践[M].北京:机械工业出版社,2010.
[5]向东,尹斌,王海光.一种基于SG3525的半桥变换器[J].中国科技论文在线,2006(5).
[6]谭宝成,崔佳超.大功率车载交流电源的设计与研究[J].电子设计工程,2014(20).
[7]刘珊,易灵芝,邓栋,等.基于改进占空比扰动法的光伏系统的研究[J].计算技术与自动化,2011(3).