基于迭代学习的光伏路灯轨迹跟踪控制*
2018-06-04王建华周天沛
王建华,周天沛
(徐州工业职业技术学院 机电工程学院,江苏 徐州 221140)
0 引言
近年来,随着光伏产业的迅速发展,光伏应用的领域正在逐渐扩大,各种光伏新产品不断涌现。光伏路灯利用太阳能储存能源,可用于城市道路、公园和学校的照明[1],因其不消耗常规电能,不用开沟埋线,绿色环保,从而被称为绿色环保产品,因此受到人们的广泛关注,已在美国、法国、日本等发达国家得到广泛应用,在我国则处于起步阶段,普及率较低。
已有的光伏路灯多为太阳能电池板固定结构,不能跟踪太阳移动,降低了储能效率[2-4]。为提高光伏路灯对太阳轨迹的跟踪能力,本文提出了一种两关节型结构的光伏路灯,并采用闭环PD型迭代学习控制算法对轨迹进行精确跟踪控制。
1 两关节型光伏路灯模型
两关节型光伏路灯模型如图1所示,其动态性能可由二阶非线性微分方程描述[5]:
(1)

如果忽略摩擦力矩,则式(1)可以写成:
(2)


(3)
已知x=(x1,x2)′,令控制力矩输入u=τ,外加扰动输入ud=τd,y=x,则:

(4)

(5)
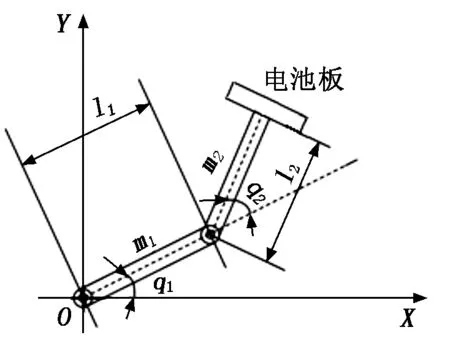
图1 两关节型光伏路灯模型

(6)
(7)
其中:t为时间。
图1中,m1=10 kg,m2=5 kg,l1=1 m,l2=0.5 m。 则被控对象的初始条件为:
(8)
已知控制力矩为:
(9)
其中:e为跟踪误差,e=qd-q,q为角位移实际运行轨迹;Kp为比例系数(P参数);Kd为微分系数(D参数)。
2 迭代学习控制
迭代学习控制(Iterative Learning Control,ILC)是智能控制的一个分支,其算法的目标是利用反复的迭代修正以达到某种控制目的的改善,适合于具有重复运动轨迹的被控对象。迭代学习控制采用的策略是“在重复中学习”,并具有记忆和修正功能,它以给定轨迹与输出轨迹的偏差来修正不理想的控制信号,从而使得系统的跟踪性能得以提高[7]。
迭代学习控制方法分为两类:闭环学习和开环学习[8-9]。开环迭代学习控制算法是第i+1次的控制等于第i次控制基础上再加上第i次输出误差的校正项,即:
ui+1(t)=L(ui(t),ei(t)).
(10)
其中:ui+1为第i+1次的控制力矩;L为线性或非线性算子;ei为第i次的跟踪误差。
闭环迭代学习控制算法是第i+1次的控制等于第i次控制基础上再加上第i+1次输出误差的校正项,即:
ui+1(t)=L(ui(t),ei+1(t)).
(11)
其中:ei+1为第i+1次的跟踪误差。
开环迭代学习算法利用了前次运行的信息,而闭环迭代学习算法没有利用前次运行的信息,利用的是当前运行信息以改善其控制性能。总体来说,闭环迭代学习控制的性能要优于开环迭代学习控制。本文将闭环迭代学习控制与常用的PD控制结合,即采用闭环PD迭代学习控制方法进行轨迹跟踪控制,其控制率为:

(12)
3 仿真分析
3.1 独立PD控制仿真
在Simulink中建立的独立PD控制模型如图2所示。图2中有两个S-Function,PD_ctrl为独立PD算法实现模块,PD_plant为两关节型路灯模型。该算法结合两关节型路灯的角位移误差与角速度误差得出某一时刻的控制量,此控制量应用在两关节型路灯模型上得到模型的输出,再将模型的输出与期望值做对比得到误差,再次进行算法的运算[10]。

图2 独立PD控制模型
得到的独立PD控制仿真结果如图3所示。经过独立PD控制,关节1角位移误差在±0.06(rad)之内,关节2的角位移误差在±0.02(rad)之内,误差呈现周期性变化。该算法结构简单,运算速度较快,但存在较大误差。
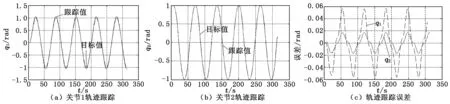
图3 独立PD控制的轨迹跟踪
3.2 闭环PD迭代学习控制仿真
在Simulink中建立的闭环PD迭代学习控制模型如图4所示。其中PD_ctrl为独立PD算法实现模块;PD_plant为两关节型路灯模型。
得到的闭环PD迭代学习控制仿真结果如图5所示,当迭代进入第3次,关节1、关节2跟踪误差已经很小。
通过对比独立PD控制和闭环PD迭代学习控制的轨迹跟踪可以看出,闭环PD迭代学习控制在开始时,q1的误差接近0.3 rad,大于独立PD控制误差。但是随着迭代的进行,闭环PD迭代学习控制的误差大幅减小,当迭代次数大于等于3之后,其误差非常小,接近于0。因此,证明闭环PD迭代学习具有很高的控制精度。

图4 闭环PD迭代学习控制模型
4 结语
本文针对两关节型光伏路灯的太阳轨迹精确跟踪,提出了闭环PD型迭代学习控制算法。该算法结构简单,易于实现,而且能以非常简单的方式处理不确定度相当高的动态系统,适应性强。通过与独立PD控制算法的仿真对比,证明了该算法易于实现、轨迹跟踪精度高。

图5 闭环PD迭代学习控制的轨迹跟踪
参考文献:
[1] 王瑜,傅明星.太阳能光伏追踪控制系统的研究[J].机械工程与自动化,2015(5):159-161.
[2] 徐炜君,原大明.基于PLC日轨计算的太阳跟踪控制优化[J].化工自动化及仪表,2016,43(8):855-858.
[3] 杨文合,高延鹏,王兴鲁.基于PLC的线性菲涅耳式太阳能跟踪控制系统设计与实现[J].机械制造,2016,54(12):15-17.
[4] 罗金玲.太阳能光伏发电自动跟踪控制系统设计[J].物联网技术,2015,12(6):70-74.
[5] 胡阳.工业机器人迭代学习控制方法研究[D].重庆:重庆大学,2013:9-17.
[6] 阎世梁,张华,王银玲,等.极坐标下基于迭代学习的移动机器人轨迹跟踪控制[J].计算机应用,2010,30(8):2017-2020.
[7] 田慧慧,苏玉鑫.机器人系统非线性分散重复学习轨迹跟踪控制[J].自动化学报,2011,37(10):1264-1271.
[8] 于少娟,齐向华,吴聚华.迭代学习控制理论及应用[M].北京:机械工业出版社,2005.
[9] 皮道映,孙优贤.非线性系统开闭环IP型迭代学习控制律及其收敛性[J].控制理论与应用,1998,15(3):400-403.
[10] 刘金琨.机器人控制系统的设计与Matlab仿真[M].北京:清华大学出版社,2009.
