带自调整因子的双馈风力发电空载并网模糊控制
2018-06-01
(宝鸡文理学院电子电气工程学院,陕西 宝鸡 721007)
0 引言
近年来,变速恒频风力发电机组因其有功、无功功率解耦控制、能量四象限运行以及变流器容量小等优点而受到广泛应用[1-2]。随着单机容量及装机规模的不断增大,机组安全平稳并网是双馈风电机组持续发电运行的首要条件。
目前,变速恒频风力发电机组并网方式主要有:空载并网、负载并网和孤岛并网[1]。其中,空载并网因其结构、控制简单,在工业现场得到了广泛应用。国内外学者也对其控制方式做了相关研究。参考文献[2-3]采用传统矢量变换,将PID控制方式实现并网前发电机定子电流与电网电流在幅值、频率、相位上的一致,从而实现并网。PID控制方式简单,但控制效果依赖于双馈电机的精确数学模型。参考文献[4]提出一种BP神经网络PID的空载并网控制策略,并网过渡过程短,稳态精度较高,但该算法中PID参数的准确性取决于BP神经网络各层数的节点数。参考文献[5]提出了基于定子磁链定向的双馈电机模糊PID控制策略,实现了良好的并网动态品质。但其在控制器设计中,模糊控制规则是不能改变的。在实际的空载并网过程中,双馈电机定子电压和电网电压的误差大小是不断变化的,为了更好地动态调节过程,需要模糊论域根据误差的调节而调节。
基于此,在参考文献[5]的基础上,提出了带自调整因子的双馈风力发电空载并网模糊控制,控制器根据d,q轴电流误差大小分配不同的调整因子,从而使控制论域得到自我调整,进一步加速了空载并网的过渡过程,增强了并网的平稳性。
1 双馈电机空载并网数学模型
在建立双馈电机数学模型之前,规定电机定子绕组采用发电机惯例;转子绕组采用电动机惯例。在同步旋转d,q坐标系下,双馈电机的定、转子电压、电流磁链方程为[6]:
(1)
(2)
(3)
(4)
式(1)~(4)中,ud1,uq1,ud2,uq2,id1,iq1,id2,iq2分别表示定、转子电压,电流的d,q轴分量;ψd1,ψq1,ψd2,ψq2分别表示定、转子磁链的d,q轴分量;(ω1-ωr)为dq坐标系相对于转子的角速度;R1,R2分别为定、转子电阻;L1,L2分别为定、转子电感;Lm为定、转子互感。
双馈电机空载并网的基本理论是[7]:并网前,电机不带负载,即定子电流为0,反映到同步旋转坐标系,即id1=0,iq1=0。通过控制双馈电机转子交流励磁电源的幅值及频率使定子侧发出电的幅值、频率、相位与电网电压的幅值、频率、相位一致,从而达到并网要求。
采用定子磁链定向矢量控制,将定子磁链定向于d轴上,则
(5)
将id1=0,iq1=0和式(5)代入式(4)中,得空载并网时双馈电机转子电流指令值为:
(6)
将id1=0,iq1=0 和式(6)代入(2)中,得转子电压方程为:
(7)
式(5)~ (7)构成了双馈电机空载并网数学模型。
2 带自调整因子模糊PID控制器设计
模糊PID控制是在系统运行过程中,不断检测给定与反馈的偏差e及偏差变化率ec=de/dt,根据事先确定的模糊约束关系及推理方法,实时在线修正P,I,D参数,使被控对象具有良好的动、静态品质。根据其工作原理,设计过程如下[8-10]:
甲基二磺隆和炔草酯防治小麦田禾本科杂草效果研究……………………………… 于金萍,刘亦学,张 惟,李 琦,白鹏华(83)
2.1 确定模糊控制器的输入输出变量。
根据1章中的双馈电机空载并网数学模型,有转子电流id2,iq22个控制环,因此,选取id2给定电流与反馈电流的偏差ed及偏差变化率edc做为模糊控制器1的输入;选取iq2给定电流与反馈电流的偏差eq及偏差变化率eqc做为模糊控制器2的输入,2个控制器的输出分别为其对应的P,I,D参数增量,即,ΔKP,ΔKI,ΔKD。根据双馈风力发电机实际运行经验,并且考虑电压、电流传感器检测误差,取偏差ed,eq及偏差变化率edc,eqc的模糊基本论域为[-5,5],输出量ΔKP,ΔKI,ΔKD的论域为[-10,10]。
2.2 模糊化输入输出变量。
模糊控制的精度是随变量量化等级的增加而提高的。在本文中,设计ed,eq,edc,eqc,ΔKP,ΔKI,ΔKD均包含7个模糊等级,即:{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}。对应的模糊语言均为{NB,NM,NS,ZO,PS,PM,PB},该集合中元素分别代表负大、负中、负小、零、正小、正中、正大[3]。
在双馈电机空载并网过程中,考虑到并网电网偏差的产生是随机的,同时为简化计算,输入输出变量的模糊子集都采用三角函数的隶属度函数。
2.3 确定PID参数模糊控制规则
在空载并网策略中,对2个电流环偏差e的控制规律尤为重要,控制规律设置的不合适会使定子电压与电网电压相差较大,并网过程出现较大过冲。以id2环为例,当id2的给定值与反馈值相差较大时,应取较大的KP,使转子电压分量ud2输出幅度增加,以提高定子输出电压幅度;但是为了避免由于开始时偏差ed的瞬间变大可能出现的微分过饱和而使控制作用超出许可范围,应取较小的KD,同时为了防止系统速度响应出现较大的超调,产生积分饱和,应对积分作用加以限制,通常取KI=0,等等。根据空载并网的控制经验,可得到并网控制的输出参数(ΔKP,ΔKI,ΔKD)的模糊控制规则共49条。通过查询该表并且经过解模糊就可以得到ΔKP,ΔKI和ΔKD的最终输出值,双馈电机在不同的工况下调用不同的控制规则来调节定子电压,使其与电网电压的幅值、相位、频率相一致。
2.4 调整控制因子
在上述的模糊控制规律中发现,若设模糊控制器的输入(偏差e和偏差变化率ec)和输出(ΔKP,ΔKI,ΔKD)变量统一为u,且每个变量的模糊等级相同,则有以下规律:
{e}={ec}={u}={-m,-m+1,...,-2,-1,0,+1,+2,...,m-1,m}。
由表1可得出:
u= -(e+ec)/2
(8)
在本论文中,考虑给空载并网模糊控制器中加入调整因子α,则(8)式变为:
u=-[αe+(1-α)ec]α∈(0,1)
(9)
通过对α的调节,可以改变e及ec的作用程度,达到调节控制规律的目的。
对于双馈风力发电空载并网控制,在并网的起始时刻,定子电压与电网电压幅值偏差e较大,这时需要e在控制规律中起较大作用;在并网过程趋向稳态阶段时,电压偏差已经调节的比较小,希望在尽可能短的时间内使系统稳定,这就需要在控制规律中ec起较大作用。
α1,α2∈(0,1),α1<α2
(10)
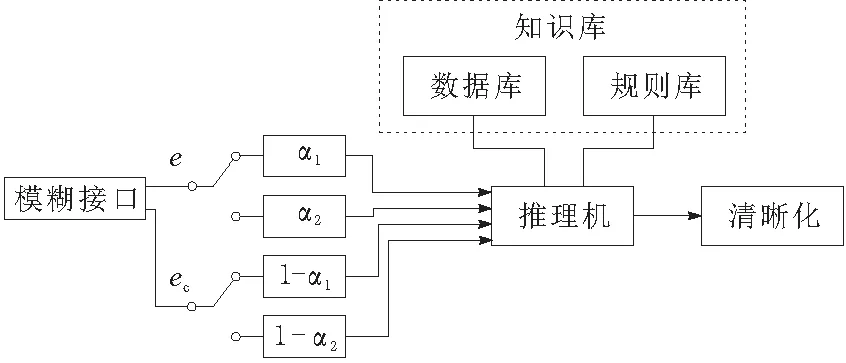
图1 带自调整因子模糊控制器结构
2.5 模糊量的清晰化
将模糊控制器的输出量ΔKP,ΔKI,ΔKD采用重心法转化为精确量。
3 实验结果验证
为了验证所提带自适应调整因子模糊控制的双馈风力发电空载并网控制策略优越性,在自行搭建的双馈风力发电模拟平台上进行了实验研究。系统参数是,双馈电机额定功率15 kW;额定电压380 V;极对数为3;定子电阻为0.658 1 Ω;定子电抗为1.334 6 Ω;转子电阻为0.105 8 Ω;转子电抗为2.177 8 Ω;互感电抗为42.734 Ω。双馈电机定子侧通过升压变压器并网。
在本设计中经过反复验证,确定当α1=0.68和α2=0.32时空载并网产生的冲击最小,因此在两个转子电流环中调整因子均设置为0.68和0.32。图2、图3分别为采用常规的模糊PID控制和采用带调整因子的模糊控制实验波形。可以看出,常规模糊控制时,定子电压与电网电压差较大,导致并网时刻定子电流有较大冲击,并网过程在大概20 ms后趋于稳态;采用所提控制策略后,减小了并网时的电流冲击,且过渡过程短暂。在两种控制策略均满足并网要求的条件下,所提策略能根据误差及误差率的变化及时调整控制论域,使定子电压跟快、更精确的达到电网电压,提高了机组并网时的稳定性。

图2 常规模糊控制空载并网实验图
4 结束语
为了改善传统基于PID控制的双馈电机空载并网过程依赖电机精确数学模型的不足,在模糊控制PID基础上,提出了带自调整因子的双馈电机空载并网模糊控制。分5步骤设计了带2个自调整因子的模糊PID控制器,可以根据空载并网的不同过程动态调整模糊控制论域。通过与传统的模糊控制空在并网实验结果相比较,可以看出所涉及的控制器能够更加准确、迅速的调整定子电压使其满足并网要求。
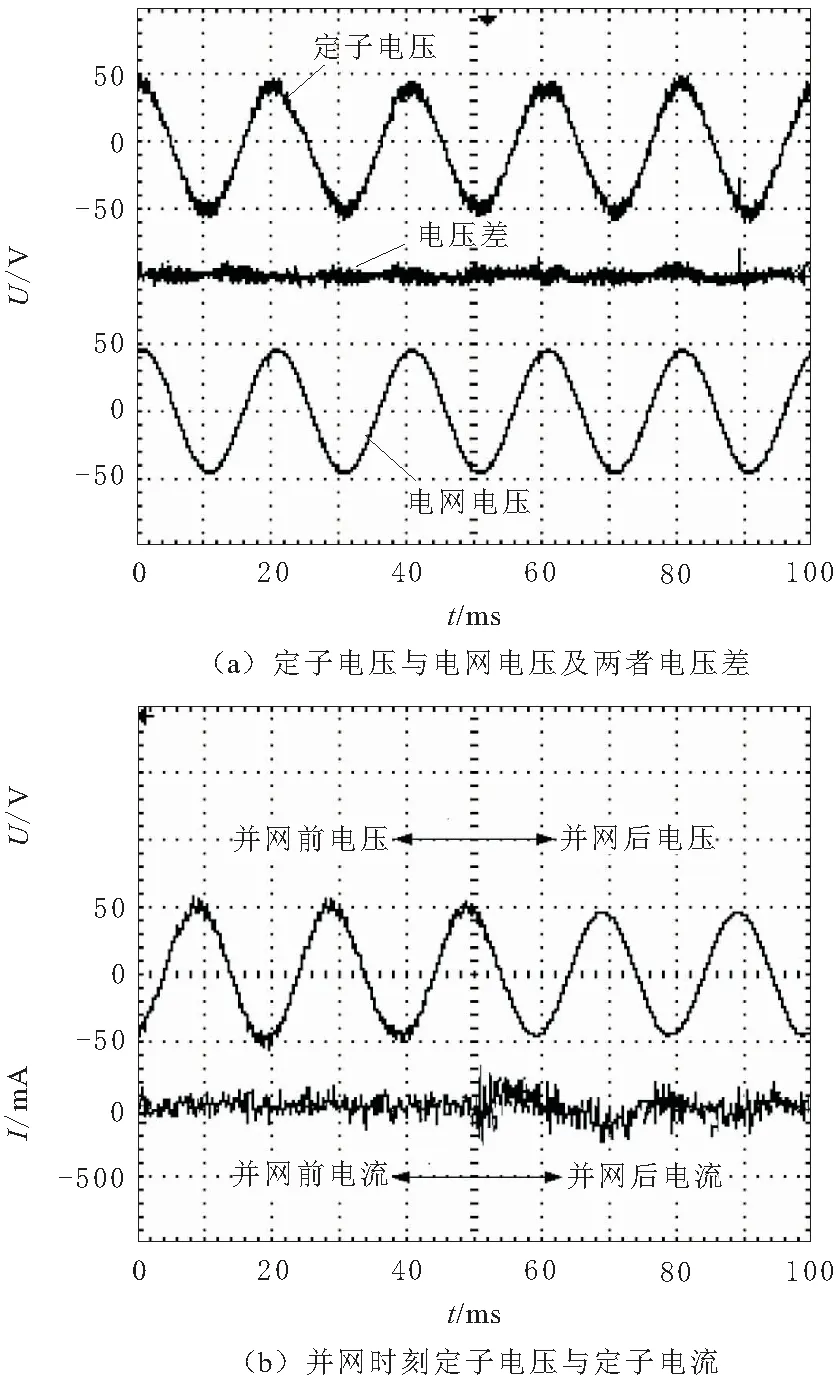
图3 带自调整因子模糊控制空载并网实验
参考文献:
[1] 张文娟,高勇. 引入比例-谐振控制器的双馈风电机组空载并网控制[J]. 电力系统自动化, 2011, 35(18): 25-30.
[2] 刘其辉,贺益康,卞松江. 变速恒频风力发电机空载并网控制[J].中国电机工程学报,2004,24(3):6 - 11.
[3] 刘其辉,贺益康,张建华.交流励磁变速恒频风力发电机的运行控制与建模仿真[J].中国电机工程学报, 2006, 26 (5): 43-50.
[4] 吕艳玲,冯曦,朱博,等.双馈风力发电机 BP 神经网络并网策略研究[J].哈尔滨理工大学学报,2017,22(5) : 40-45.
[5] 陈炜,肖丹,王慧敏,等.双馈风力发电系统空载并网模糊PI控制[J]. 太阳能学报, 2009, 30(6): 794-798.
[6] 张文娟.变速恒频风力发电系统及其控制研究[D].西安:西安理工大学,2011.
[7] 田永贵,王 奔,李小明,等 . 基于自抗扰的变速恒频双馈风力发电机并网控制研究[J]. 四川电力技术,2015, 38 (2 ): 67-72.
[8] 范钦民,闫飞,张翠芳,等 . 基于模糊控制的光伏MPPT算法改进[J].太阳能学报,2017, 38 (3 ): 2151-2158.
[9] 万庆祝,张翃帆. 基于模糊控制与自适应步长相结合的光伏发电系统最大功率点跟踪研究[J]. 电气工程学报,2017, 12(3 ): 33-40.
