多胞LPV模型的Buck变换器鲁棒增益调度控制
2018-05-14黄金杰潘晓真
黄金杰 潘晓真

摘 要:针对输入电压和输出负载发生变化会影响Buck变换器动态特性的问题,建立了Buck变换器多胞线性变参数(linear parametervarying, LPV)模型,同时引入多胞优化技术,基于线性矩阵不等式(LMI)最优化的方法,利用状态反馈将闭环系统的极点配置到满足动态响应要求的特定区域,设计了一种基于多胞线性变参数模型的Buck变换器鲁棒变增益控制器。仿真结果表明,无论是在负载电阻突变或者输入电压突变的情况下,还是存在负载扰动电流的情况下,所设计的鲁棒变增益控制器都能够使Buck变换器保持稳定的电压输出和良好的动态特性。
关键词:Buck变换器;线性变参数;线性矩阵不等式;多胞技术;区域极点配置
中图分类号:TM 273
文献标志码:A
文章编号:1007-449X(2018)01-0093-07
0 引 言
现今,开关电源技术与人们的生产、生活息息相关。一直以来,在电力电子领域,开关变换器大多运用PID控制策略[1];但是PID控制参数选取困难,很难保证系统达到最优来满足变换器逐步提高的动态响应和控制精确度的要求[2]。
随着对Buck变换器性能要求的不断提高,近年来,对其控制策略的研究有了新的突破。根据文献[3]的论述,作者在对状态空间平均模型进行分析后,建立了Buck变换器小信号数学模型。通过此模型可以确定开关变换器在开环、闭环控制下的传递函数。文献[4]则将随机优化的思想引入Buck变换器的相关研究中,提出了将变换器的非线性系统模型当作一种带有不确定噪声负载的随机线性系统的模型,并假设随机系统是状态完全能达的,然后推导出变换器稳定工作且噪声抑制达到最佳时的状态反馈控制器。在此基础上,文献[5]进一步通过引入增广矩阵,根据线性二次型调节器(linear quadratic regulator, LQR)最优调节原理对PID控制器的参数进行优化整定,实现了DCDC变换器无静差控制。文献[6]利用无源性理论构造反馈控制器并对其系数进行优化整定。然而,以上控制器的设计都是建立在对Buck变换器精确建模的基础上。在实际生产过程中,Buck变换器的结构参数和性能会因器件的差异和老化发生变化,与设计所用的数学模型产生偏差,导致Buck变换器的输出性能恶化。近几年,鲁棒控制得到发展,带动了LPV控制的发展,这给解决一些非线性问题带来新的方法和途径[7]。
为了解决Buck变换器的性能鲁棒性问题,引入了LPV模型,并在开关变换器的控制设计中,采用了变增益控制理论。此做法是为了增强系统在受到外部扰动和内部参数变化时的鲁棒性,得到一种在实际应用中控制性能良好的开关变换器。
1 Buck变换器的建模
1.1 Buck变换器
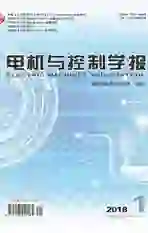
默认变换器工作在连续导通模式(continuous conduction mode,CCM)。图1所示为Buck变换器拓扑结构[8]。其中:L为变换器的电感,等效串联电阻为RL;C为变换器的输出电容,等效电阻为RC;D为续流二极管;R为负载电阻;S是开关管;Ui和Uo分别为系统的输入端电压和输出端电压。由于RL和RC阻值很小,以至于可以忽略。
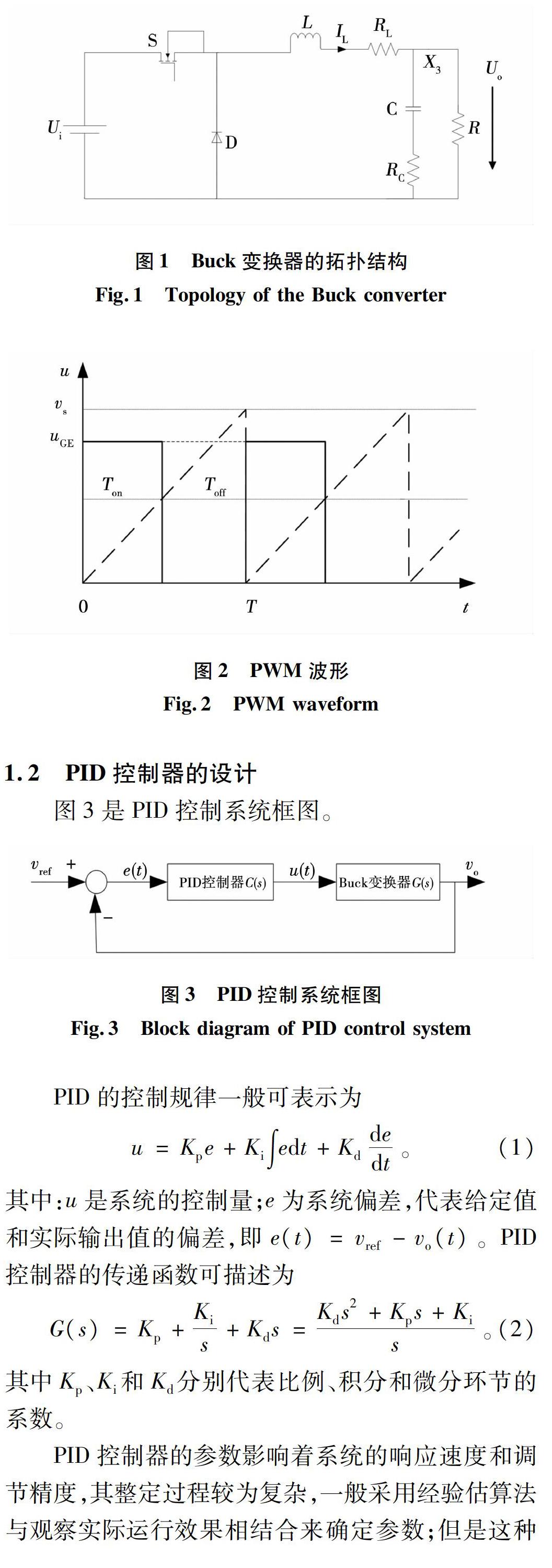
图2所示为等幅的PWM波,用来控制开关管通断。其中T是开关周期,Ton和Toff分别表示开关管在一个周期内的导通时间和关断时间。占空比可以表示为Ton/(Ton+Toff)。
根据图2所示,Buck变换器的工作原理如下:
1)当开关管S导通时,Ui和Uo的电势差加在电感L两端,iL增大,存储能量,进入充电模式;
2)当开关管S关断时,iL减小,进入电感放电模式,电感L和电容C同时向负载电阻R提供能量,维持Uo不变。
PID控制器的参数影响着系统的响应速度和调节精度,其整定过程较为复杂,一般采用经验估算法与观察实际运行效果相结合来确定参数;但是这种方法往往需要很长的调试过程,并且不能保证达到最优效果[9]。为了进一步说明LPV控制器的优越性,除了和常规PID控制器作比較外,根据文献[5]中的控制方案,利用Matlab工具箱中的LQR进一步求得PID控制器的1组最优控制参数后,3组控制方案加以比较。通过在Matlab中不断的校正得出:二次型最优PID控制参数:Kp=0.031 6,Ki=30,Kd=0.000 05;常规PID控制参数:Kp=0.079,Ki=22,Kd=0.000 15。
2 LPV控制器的设计
2.1 LPV模型的建立
系统的不确定性因素,如稳态的占空比,负载或者储能元件的参数变化都会影响Buck变换器的线性化模型的响应。由于这些原因,在控制和设计开关变换器时,允许在一定程度上处理模型中存在的不确定性,这具有重大的意义。图4是Buck变换器的原理图[10]。
当给系统施加随机变化的扰动信号时,3种控制器对于扰动的抑制作用是不同的。LPV控制器能使输出电压在很小的范围波动,产生的纹波比较小。其他2种控制器在干扰存在的情况下,输出电压受到的影响比较强烈,波动范围比较大。可以看出本文设计的LPV控制器相对于其他2种控制器在干扰抑制方面有更好的表现,系统的动态性能更优异。
5 结 论
本文中,以负载电阻和输入电压作为变参数来研究Buck变换器的控制器设计,把2个变化参数的极大值和极小值分别组合在一起,构成凸多面体结构的LPV模型。这样在进行LPV控制器的设计和稳定性分析时,只需要考虑多胞形的顶点,计算量小,更加易于实现。仿真结果进一步表明,相比于二次型最优PID控制器和常规PID控制器,基于LPV模型的鲁棒变增益控制器更具优势。当输入电压和负载发生改变时,Buck变换器输出电压超调量更小、调节更迅速;当负载电流存在扰动时,Buck变换器抑制干扰的能力更强,鲁棒性更好。
参 考 文 献:
[1] 桑绘绘, 杨奕, 沈彩琳. 基于PID控制的Buck变换器仿真系统设计[J].南通大学学报(自然科学版),2011,10(1):24.
SANG Huihui, YANG Yi, SHEN Cailin. Design of Buck converter simulation system based on PID control[J]. Journal of Nantong University (Natural Science Edition), 2011, 10(1):24.
[2] 帅定新, 谢运祥, 王晓刚. 基于状态反馈精确线性化Buck变换器的最优控制[J].中国电机工程学报,2008,28(33):1.
SHUAI Dingxin, XIE Yunxiang, WANG Xiaogang. Optimal control of Buck converter based on state feedback exact linearization[J]. Proceedings of the CSEE, 2008, 28(33):1.
[3] 乐江源, 谢运祥, 冀玉丕, 等. CCM Buck变换器的精确反馈线性化滑模变结构控制[J].华南理工大学学报(自然科学版),2012, 40( 2):130.
LE Jiangyuan, XIE Yunxiang, JI Yupi, et al. CCM Buck converter exact feedback linearization sliding mode variable structure control[J]. China South China University Journal (Natural Science Edition), 2012,40(2):130.
[4] 吴爱国, 李际涛. DCDC变换器控制方法研究现状[J]. 电力电子技术,1999,33(2):75.
WU Aiguo, LI Jitao. Research on controlling method of DCDC converter[J]. Power Electronic Technology, 1999, 33( 2):75.
[5] 马红波, 冯全源. BUCK型开关变换器最优PID控制器设计[J].电机与控制学报,2008,12(6):639.
MA Hongbo, FENG Quanyuan. BUCK switch converter optimal PID controller design[J]. Electric Machines and Control,2008, 12(6):639.
[6] 陈江辉, 谢运祥, 王健敏. 单Buck型逆变器状态反馈线性化最优控制[J].电机与控制学报,2014, 18(8):75.
CHEN Jianghui, XIE Yunxiang, WANG Jianmin.State feedback linearization optimal control for single Buck inverter[J]. Electric Machines and Control, 2014, 18(8):75.
[7] 张淦胜. Buck变换器LPV模型的增益调度控制[A].第26届中国过程控制会议(CPCC2015)论文集[C].中国自动化学会过程控制专业委员会,2015.
[8] 周雒维, 毕凯, 刘宿城, 等. 宽变工作点DC/DC开关变换器的建模与控制[J].电机与控制学报,2013, 17(2):57.
ZHOU Luowei,BI Kai, LIU Sucheng, et al. Wider working point of DC/DC switching converter modeling and control[J]. Electric Machines and Control, 2013,17(2):57.
[9] 江东, 顾玉武, 杨嘉祥,等. 混合磁悬浮球系统变参数PID控制仿真[J].哈尔滨理工大学学报,2007,12(2):31.
JIANG Dong, GU Yuwu, YANG Jiaxiang, et al. Variable parameter PID control simulation of hybrid magnetic levitation ball system[J].Journal of Harbin University of Science and Technology, 2007, 12(2):31.
[10] SUN Kangwen, ZHU Ming, QI Bojin, et al. Design and simulation to composite PI controller on the stratospheric airship[J]. Sensors and Transducers, 2014,171(5):7.
[11] ABBAS H S, ALI A, HOSHEMI S M, et al. LPV statefeedback control of a control moment gyrodcope[J]. Control Engineering Practice, 2014,24:131.
[12] 陈东彦,李兴伟,石宇静. 不确定状态饱和线性系统的鲁棒稳定性分析[J]. 哈尔滨理工大学学报,2013,18(3):81.
CHEN Dongyan, LI Xingwei, SHI Yujing.Robust stability analysis of linear systems with uncertain state saturation[J]. Journal of Harbin University of Science and Technology, 2013,18(3):81.
[13] XIAN Yanhua, FENG Jiuchao. Regional pole assignment robust PID control algorithm for DCDC converter[J].Journal of Northeastern University, 2013, 34(10):1370.
[14] 王俊玲,王常虹,袁偉. 时滞LPV离散系统的稳定新准则及控制器设计[J].电机与控制学报,2004, 8(1):44.
WANG Junling, WANG Changhong, YUAN Wei. New stability criteria and controller design for time delay LPV discrete system [J]. Electric Machines and Control, 2004, 8(1):44.
(编辑:邱赫男)