开关磁阻电机直接自适应神经网络控制
2018-05-14李存贺王国峰李岩范云生许爱德
李存贺 王国峰 李岩 范云生 许爱德


摘 要:针对开关磁阻电机调速系统存在的未知参数波动和外部负载扰动问题,提出了直接瞬时转矩控制下的基于最小学习参数的直接自适应神经网络控制算法实现开关磁阻电机高品质调速控制。采用RBF神经网络对包含未知参数波动和外部负载扰动等不确定项的理想控制律进行整体逼近。将神经网络理想权值的范数作为在线估计参数,使在线学习参数由多个权值减少为一个,降低了控制器的计算负担。基于李雅普诺夫函数的稳定性分析保证了闭环调速系统半全局一致最终有界稳定。与PI控制的对比仿真试验表明,直接自适应神经网络控制器能够有效地提高开关磁阻电机调速系统对参数波动的自适应性和对外部负载扰动的鲁棒性。
关键词:开关磁阻电机;速度控制;直接自适应神经网络;最少学习参数;PI控制;直接瞬时转矩控制
中图分类号:TM 352
文献标志码:A
文章编号:1007-449X(2018)01-0029-08
0 引 言
开关磁阻电机(switched reluctance motor,SRM)具有结构简单、制造成本低、调速范围宽、可靠性及效率高等优点,在新能源电动汽车、风力发电、矿山机械、油田抽油机等领域都有着一定的应用前景[1-3];然而,其定转子的双凸极结构及开关形式供电电源,使得SRM驱动系统成为一个转矩脉动大、多变量高度耦合和非线性异常严重的系统,很难进行高品质的调速控制。此外,在大部分SRM调速应用场合,还存在模型参数变化大,外界负载扰动未知的特点,常规PID控制无法实现理想控制效果。
近年来,包括自适应控制[4]、模型预测控制[5]、滑模变结构控制[6]和智能控制[7]在内的许多现代控制理论被逐渐应用到SRM调速系统中。其中,智能控制具有在线学习能力,非常适合于解决非线性系统的控制问题。文献[8]将RBF神经网络和BP神经网络分别用于SRM模型辨识和调速控制,提出一种自适应能力很强的参数可调的神经网络PID控制策略;但文中用了两个神经网络网络,使得控制策略过于复杂。文献[9]提出一种基于RBF神经网络的SRM自适应PWM转速控制方法,但RBF网络需要进行离线训练以确定网络的结构和初始参数。文献[10]提出了一种积分型滑模控制与神经网络补偿相结合的复合控制策略,使用BP神经网络补偿控制来减小滑模面的抖动。将智能控制和自适应控制相结合,可以避免网络离线重复训练的步骤,并且对参数变化和外界负载扰动具有更好的自适应性和鲁棒性。文献[11]和文献[12]分别设计了自适应TSK模糊调速控制器和自适应模糊小脑模型关节调速控制器,均采用基于Lyapunov稳定性理论设计网络权重自适应律,并且引入符号函数实现对调节误差的补偿控制,取得了很好的调速控制效果;但以上两种自适应方法均需要多个参数在线调整,极大增加了控制器的计算量,并且符号函数的引入,会造成控制量的抖振。文献[13]提出了自适应模糊系统的“最小学习参数“算法,使得在线学习参数的个数显著减少,降低了控制器的计算负担。文献[14]将模糊系统参数的范数作为在线估计参数,从另一个角度解决了该问题,并且使得控制器的设计过程更加简单明了。
本文根据SRM非线性模型,采用外环转速控制和内环转矩控制相结合的双闭环调速控制策略。针对实际工况下,SRM的参数摄动和负载扰动问题,采用基于“最小学习参数”的直接自适应RBF神经网络(direct adaptive RBF neural network,DARNN)逼近调速系统理想控制律,并应用Lyapunov理论分析了系统的稳定性。转矩内环采用直接瞬时转矩控制(direct instantaneous torque control,DITC)策略。所设计控制器的一个主要优势在于控制律形式简洁易于工程实现并且只有一个自适应参数需要在线更新,极大地减少了控制器的在线计算量。最后,对所提出的方法进行了仿真验证,与PI控制的对比仿真结果表明所设计控制器具有良好的控制性能。
1 问题描述
SRM具有独特的双凸极结构,定子铁芯上绕有励磁绕组无任何永磁体,转子无绕组仅有硅钢片叠压而成。SRM运行遵循最小磁阻原理,以三相6/4极SRM为例,其结构和驱动电路如图1所示。
3 DITC
从式(10)可以看出,调速系统的控制变量就是电磁转矩。因此,设计内环控制系统结构,就是设计转矩的控制算法。DITC的基本思想是把瞬时转矩作为直接控制变量,根据参考转矩与反馈转矩之间的偏差,来直接控制各导通相的开通和关断状态,避免了优化电流或磁链波形所需的复杂算法。在文献[17-18]中,已经深入分析DITC的原理。通过DITC控制SRM转矩,简化了系统的控制结构,提高了系统响应速度。本文采用文献[17]中的DITC滞环策略作为SRM调速系统内环控制方法。
基于DARNN的调速控制系统结构如图2所示。速度外环通过DARNN控制器计算出内环控制量。该给定信号与通过查表获得的电机实时输出转矩相比较,计算出转矩误差,再通过文献[17]的滞环控制策略控制转矩,实现DITC控制,完成调速。
4 仿真验证
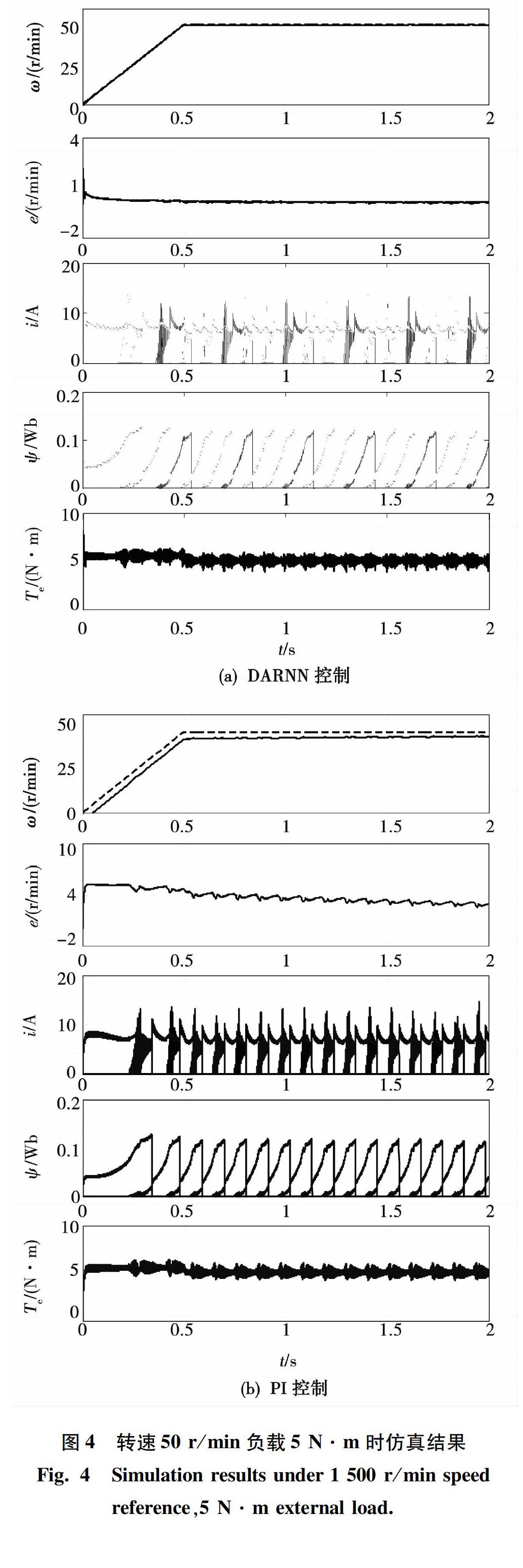
通过仿真验证DARNN控制器下的SRM调速系统转速响应特性。在Matlab/SIMULINK环境下搭建调速系统并与传统PI控制器效果进行对比。采用SimPowerSystems元件库中一台60 kW 6/4极SRM模型作为仿真对象,仿真模型的具体参数设置如表1所示。
由表2中数据可以看出,DARNN制器与PI控制器在考虑参数波动和外部负载扰动时,DARNN控制器的性能基本不受影响,远优于传统PI控制器。因此DARNN具有对参数波动较好的自适应能力,对外部负载扰动具有较好的鲁棒性。总的来说,传统PI控制器在宽范围调速、对参数变化的自适应性以及对外部负载扰动的鲁棒性上的表现是让人不满意的,这是因为传统PI控制器为固定的控制增益,几乎没有对参数变化的自适应能力和对外部负载扰动的抵抗能力。而本文所設计的DARNN控制器具有对系统未知动态的逼近特性和参数在线学习的能力,因此能够在宽转速范围、参数变化和外部负载扰动时仍然保持较好的转速跟踪性能。
5 结 论
实现高性能的转速控制,一直是SRM调速控制的难点。本文从SRM特性的非线性本质出发,采用外环控制转速,内环控制转矩代替控制电流的方法,对SRM调速系统进行设计。将基于“最少学习参数”的直接自适应RBF神经网络用于设计速度控制器,有效地抑制了参数摄动和负载扰动对转速造成的影响。仿真结果证明,该控制策略能够有效实现宽范围速度调节,并且具有较强的鲁棒能力,实现了高性能转速控制。
参 考 文 献:
[1] BOSTANCI E,MOALLEM M,PARSAPOUR A,et al. Opportunities and challenges of switched reluctance motor drives for electric propulsion:a comparative study[J]. IEEE Transactions on Transportation Electrification,2017,3(1): 58.
[2] MA C,QU L Y. Multiobjective optimization of switched reluctance motors based on design of experiments and particle swarm optimization,IEEE Transactions on Energy Conversion,2015,30(3):1144.
[3] 甘醇,吳建华,王宁,等. 一种零电压保持开通的开关磁阻电机再生制动控制策略[J]. 电机与控制学报,2015,19(9): 8.
GAN Chun,WU Jianhua,WANG Ning,et al. Regenerative braking control strategy for switched reluctance motors with zerovoltage loop hold[J]. Electric Machines and Control,2015,19(9): 8.
[4] CHEN C,LIU T. Nonlinear controller design for switched reluctance drive system[J]. IEEE Transactions on Aerospace and Electronic systems,2003,39(4): 1429.
[5] LI X,SHAMSI P. Inductance surface learning for model predictive current control of switched reluctance motors[J]. IEEE Transactions on Transportation Electrification,2015,1(3): 287.
[6] 程勇,林辉. 开关磁阻电机非奇异快速终端滑模位置控制[J].电机与控制学报,2012,16(9):78.
CHENG Yong,LIN Hui. Nonsingular fast terminal sliding mode positioning control in switched reluctance motor[J]. Electric Machines and Control,2012,16(9):78.
[7] 张艳杰,徐丙垠,熊立新,等.一种基于SRD模糊控制的风力机模拟器[J].电机与控制学报,2011,15(1):38.
ZHANG Yanjie,XU Bingyin,XIONG Lixin,et al.Wind turbine simulator based on fuzzy control of SRD[J]. Electric Machines and Control,2011,15(1):38.
[8] 夏长亮,修杰. 基于RBF神经网络非线性预测模型的开关磁阻电机自适应PID控制[J]. 中国电机工程学报,2007,27(3):57.
XIA Changliang,XIU Jie. RBF ANN nonlinear prediction model based adaptive PID control of switched reluctance motor[J]. Proceeding of the CSEE,2007,27(3):57.
[9] 夏长亮,陈自然,李斌. 开关磁阻电机神经网络自适应PWM转速控制[J].中国电机工程学报,2006,26(13):141.
XIA Changliang,CHEN Ziran,LI Bin. Neural network based adaptive PWM speed control in switched reluctance motors[J]. Proceeding of the CSEE,2006,26(13):141.
[10] 李永坚,许志伟,彭晓. SRM积分滑模变结构与神经网络补偿控制[J].电机与控制学报,2011,15(1): 33.
LI Yongjian,XU Zhiwei,PENG Xiao. The hybridcontrol of SRM based on slidingmode variable structure control with integral action and neural networkcompensation[J]. Electric Machines and Control,2011,15(1): 33.
[11] TSENG C L,WANG S Y,CHIEN S C,et al.Development of a selftuning TSKFuzzy speed control strategy for switched reluctance motor[J].IEEE Transactions on Power Electronics,2012,27(4):2141.
[12] WANG S Y,TSENG C L,CHIEN S C. Aadptive fuzzy cerebellar model articulation control for switched reluctance motor drive[J]. IET Electric Power Applications,2012,6(3):190.
[13] YANF Y S,FENG G,REN J S. A combined backstepping and smallgain approach to robust adaptivefuzzy control for strictfeedback nonlinear systems[J]. IEEE Transactions on Syatems,Man,and CyberneticsPart A: Systems and Humans,2004,34(3):406.
[14] CHEN B,LIU X P,LIU K F,et al. Direct adaptive fuzzy control of nonlinear strictfeedback systems[J]. Automatica,2009,45:1530.
[15] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,2014:39.
[16] PARK J,SANDBERG I W. Universal approximatio using radialbasisfunction networks[J]. Neural Computation,1991,3:246.
[17] INDERKA R B,DE DONCKER R W.DITCDirect instantaneous torque control of switched reluctance motor drives[J]. IEEE Transactions on Industry Applications,2003,39(4):1046.
[18] FUENGWARODSAKUL N H,MENNE M,INDERKA R B,et al. Highdynamic fourquadrant switched reluctance drive based on DITC[J]. IEEE Transactions on Industry Applications,2005,41(5):1232.
(編辑:张 楠)