新型LLC谐振变换器数字同步整流驱动方式
2018-05-14吕征宇李佳晨杨华
吕征宇 李佳晨 杨华
摘 要:提出了一种适用于LLC谐振变换器的数字同步整流驱动方式。该驱动方式基于检测同步整流MOS管的漏源极电压,进而判断体二极管的导通情况,通过电压比较器输出高低电平到数字处理器,算法程序捕获体二极管的导通时间,控制调节同步整流管驱动信号的占空比,从而使同步整流达到较理想的效果,提高变换器的效率。相比传统的同步整流驱动方式,所提的驱动方式具有电路结构与控制算法简单、驱动信号精确、动态性能好等优点。为了验证此方式的有效性,以一个72 W半桥LLC谐振变换器为样机进行了实验,样机效率达到97.5%。
关键词:LLC谐振变换器;数字同步整流;漏源极电压;体二极管;数字处理器
中图分类号:TM 46
文献标志码:A
文章编号:1007-449X(2018)01-0016-07
0 引 言
高效率、高功率密度一直以来是人们开发开关电源产品的热点,LLC谐振变换器以其结构简单、效率高,可在全负载范围内实现软开关等优点,成为一些开关电源拓扑的不二之选[1];但在低压大电流应用场合下,LLC谐振变换器等开关电源的二次侧整流二极管会产生不可忽视的损耗。因此,为了进一步提高变换器效率,通常采用以导通电阻很小的金属氧化物半导体场效应管(MOS管)替代整流二极管的同步整流技术,降低了变换器二次侧整流管的导通损耗[2]。
LLC谐振变换器的同步整流驱动方式一般分为电压型驱动和电流型驱动。电压型驱动通常采用变压器二次侧绕组或者辅助绕组提出驱动信号,结构简单,不需要增加其他隔离变压器。但当LLC谐振变换器工作在电流断续模式,即开关频率小于谐振频率的情况时,二次侧整流管中的电流下降至零以后,通过变压器给的驱动信号仍然存在,所以同步整流管保持导通,此时变换器的能量在这段时间内会从二次侧反流至一次侧,引起变换器电压增益降低,增加了损耗。因此,电压型驱动一般适用于电流临界或者连续模式下。
电流型驱动通常通过检测同步整流管电流来提供驱动信号,驱动电路方式众多[3-7],但都需要额外的电流检测元件,如电流互感器等。在低压大电流的场合下,检测二次侧电流则需要体积较大的电流互感器,导致变压器阻抗损耗增加,变换器效率降低。针对上述情况,文献[8]提出了一种检测一次侧电流以提供同步整流管驱动信号的方法,有效解决了电流互感器体积较大的问题;但是变换器又增加了复杂的辅助电路。
目前市场上也存在许多同步整流控制芯片,如SRK2000[9],FAN6208[10]等,它们的工作原理类似,应用电路简单,一般是把采样电压Vds与芯片内部电压设定值比较,判断出同步整流管开通和关断点,得到驱动信号。但是芯片对同步整流管关断的阈值电压值一般较小,约几十毫伏,因此对电路中的寄生参数十分敏感,同步整流效果不理想。
随着数字处理器的发展,数字控制的同步整流因其电路结构简单,控制精确,同时又不存在上述几种驱动方式的缺点,渐渐被广泛使用。文献[11]提出了一种通过检测同步整流管Vds电压,判断体二极管是否导通,进而每次按设定好的固定步长调整同步整流管(SR)驱动脉宽,最终确定最理想的驱动脉宽的方法;文献[12]针对文献[11]的方法提出了同步整流管开通和关断的优化设计,文章中的控制算法设置了一个固定脉宽检测窗代替文献[11]中提出的固定步长,使得SR关断时更加准确,改进后变换器效率在轻载时有0.8%的提升,但在重载情况下,几乎没任何提高。这两篇文献提出的驱动方式原理接近,暂态过程较长,要经过足够数量的开关周期同步整流才能稳定工作,电路动态性能较差。
本文提出的驱动方式原理同样基于检测同步整流管Vds电压,判断体二极管是否导通的方法,但是只需要经过一个或者两个开关周期,同步整流就能稳定工作。详细介绍了提出的同步整流驱动方式的工作原理,分析了LLC谐振变换器暂态过程的算法控制,进行了实验验证。
1 工作原理
根据文献[8]中对于同步整流管驱动开通的优化,电路重载时,效率几乎没有提高,同时开通优化并不是本文的重点,因此本文提出的数字控制同步整流驱动在开通时不进行任何优化处理,采取与原边逆变MOS管开关频率相同,并且同时开通的方式,算法简单,便于编程。
在同步整流管关断时,当开关频率fs小于等于谐振频率fr时,即电流断续模式,同步整流管要比原边MOS管提前关断,否则会导致同步整流管正向导通,能量会从负载到电源回流,降低变换器的效率[13];同时,同步整流管又不能提前过多关断,影响同步整流的效果,降低了效率。当开关频率fs大于谐振频率fr时,即电流连续模式,同步整流管要比原边MOS管延迟关断,否则快速下降的电流会通过体二极管,造成严重的反向恢复[14];同时,同步整流管又不能延迟过多关断,延迟过多会引起上下两个同步整流管共通时间过长,损害电路[11]。
1.1 能量回流分析
在开关频率fs小于等于谐振频率fr的工作状态下,即电流断续模式,当MOS管Q1和SR1同时导通,Q2和SR2关断时,电流流向如图1(a)所示,变换器将一次侧的能量通过变压器传递到二次侧;当Q1关断时,SR1上的圖1(a)所示电流已经为零,此时若SR1仍然导通,则会在SR1上产生一个负向电流,负载能量将通过变压器和Q1的体二极管回流至电源,如图1(b)所示。MOS管Q2和SR2工作模态与Q1和SR1类似,若SR2迟于Q2关断,同样会存在能量回流问题。因此为了避免能量回流带来效率降低的影响,设计时需要将同步整流管早于原边MOS管关断。
1.2 提出的算法
根据上述情况,本文提出了一种采用检测Vds电压来判断同步整流管的体二极管是否导通,从而进行关断优化的方法。本文提出的数字同步整流驱动关断优化电路原理图如图2所示。
当SR1不加驱动时,其体二极管导通,导通压降为-0.7 V。通过分压电路设置一个Vth阈值电压,其值取决于SR1导通时的压降与体二极管导通时的压降之间。通过电压比较器向DSP发送高低电平,DSP通过eCap模块捕捉高电平持续的时间,进行设置好的算法程序处理后,输出理想的同步整流驱动信号,经过驱动芯片最终输出同步整流驱动电压。算法流程图如图3所示,其中:TSR为同步整流管SR驱动信号的高电平持续时间;ΔD为在同步整流管SR关断过晚时进行减法处理,使得下个周期SR处于关断过早的状态,为了保证下个周期SR处于关断过早的状态,ΔD的值应取得大些;Ton为通过DSP的eCap模块捕获电压比较器的高电平持续时间,即SR体二极管导通时间;ΔT为使SR在电流断续模式下提前ΔT的时间关断,在电流连续模式下延迟ΔT的时间关断,根据上述的分析,ΔT的取值应尽可能小;Tth为判断SR在电流断续模式下是否要提前ΔT的时间关断,Tth的取值应尽可能小,但要大于ΔT。
根據图3算法流程图可以看出,本文提出的同步整流驱动方式控制算法较为简单,其基于DSP捕获的体二极管导通时间Ton,进行程序处理后,使得同步整流管下个开关周期的占空比为较理想的同步整流占空比,这种情况只需要一个开关周期的时间同步整流就能理想工作;若DSP没有捕获到体二极管的导通时间Ton,则下个开关周期SR的驱动时间减去ΔD,保证下个开关周期DSP能捕获到体二极管导通时间Ton,这种情况也只需要两个开关周期的时间同步整流就能理想工作。理想工作波形如图4、图5所示,可以看出,同步整流管SR关断过早经过一个开关周期后,同步整流进入有效工作状态;SR关断过晚,经过两个开关周期后,同步整流进入有效工作状态。因此,本文提出的同步整流驱动方式具有较好的动态性能。
2 暂态分析
LLC谐振变换器是通过改变开关频率来调节输出电压,当负载或者输入电压变化时,为了稳定输出电压,LLC谐振变换器的开关频率会发生改变。由于本文提出的控制算法同步整流管的开关频率与逆变MOS管的频率一致,因此LLC谐振变换器的开关频率变化时,会影响同步整流的工作。根据上述情况,在控制算法上再加一个开关频率是否变化的判断,如图6所示。若检测到开关周期与上个开关周期相同,则输出上个周期的同步整流管驱动信号;反之,则重新运行图3算法程序,输出新的同步整流驱动信号。
对于开关频率降低的暂态,逆变MOS管的驱动时间增长,导致SR管提前关断,因此不会发生上下两管共通的情况,如图7所示。
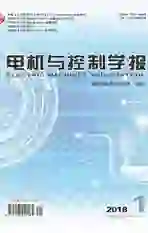
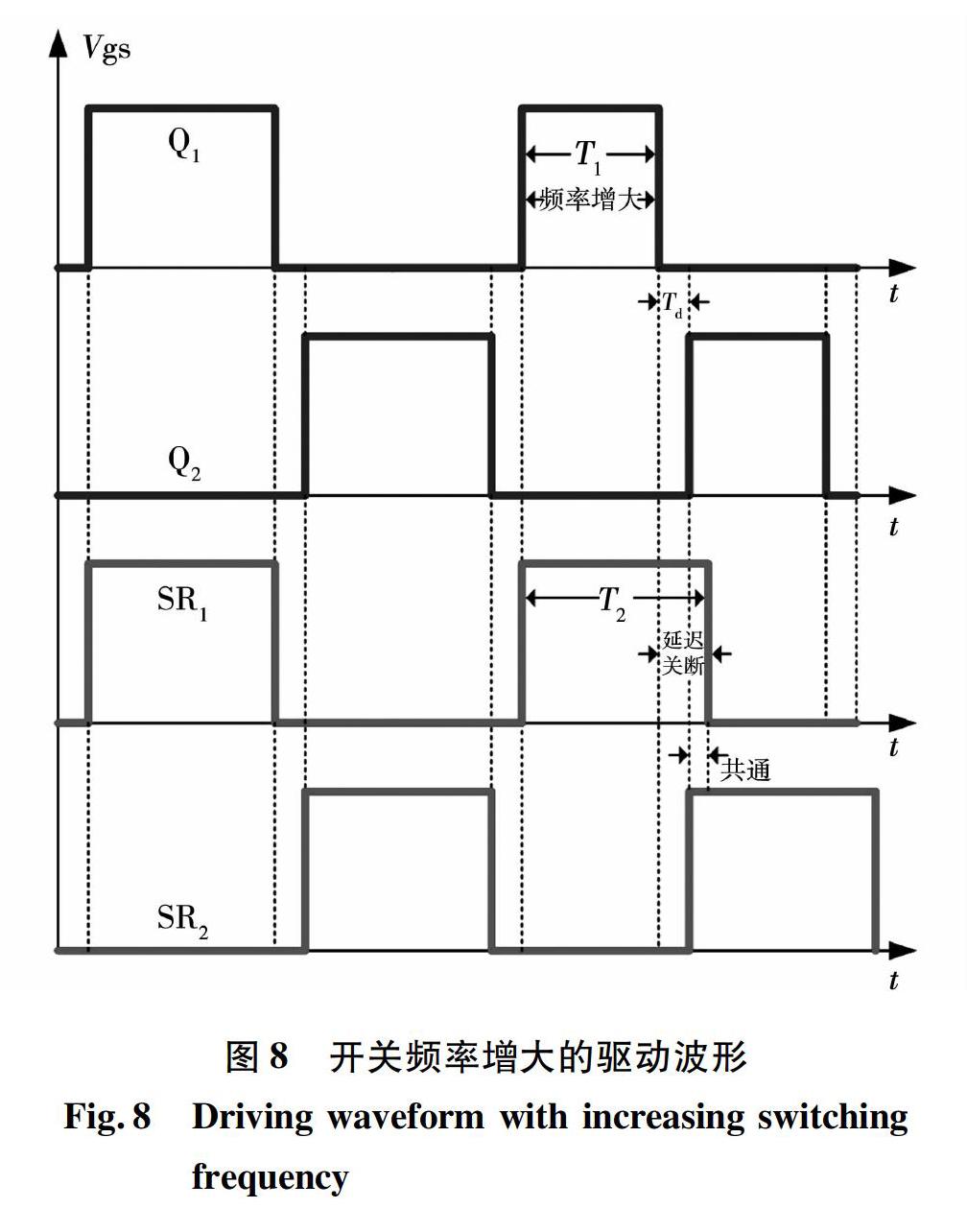
对于开关频率增大的暂态,逆变MOS管驱动时间减小,导致SR管延迟关断,情况严重则会引起上下两管共通时间过长,损害电路,如图8所示。
为了避免这种情况发生,文献[11]提出的控制算法多加了一个驱动时间判断:如果T2>T1+Td,则赋予T2一个介于T1和(T1+Td)之间的值。但是在进行判断的那个开关周期,上下两同步整流管可能已经共通一段时间,直到下个开关周期才进入正常工作。本文提出的控制算法则是一旦检测到频率发生变化,立刻使同步整流管驱动时间TSR减去ΔD,保证同步整流管处于提前关断的状态,因此不会出现共通的情况。
3 实验结果
为了验证本文提出的同步整流驱动方式,以一台72 W的半桥LLC谐振变换器为样机进行实验。电路拓扑结构如图2所示,其中,输入电压为55~65 V,输出电压为6 V,输出电流为12 A,变压器匝比为5∶1∶1;谐振频率为100 kHz,谐振腔参数为:谐振电感Lr=6.5 μH,谐振电容Cr=390 nF,励磁电感Lm=30 μH;逆变MOS管Q1、Q2型号为FQPF70N10,同步整流管SR1、SR2型号为FDP8442_F085,其导通电阻为3.1 mΩ[15];控制驱动回路中,数字处理器DSP采用TMS320F28035,检测漏源电压的电路采用隔离运放AMC1301,电压比较器为LM324,驱动芯片为FAN73901。
由于本算法开始工作时首先需要判断同步整流管SR处于关断过早还是过晚的状态,若处于关断过晚的状态,会导致SR共通,情况严重可能会损坏电路,因此一开始算法设置SR驱动的占空比,使之处于关断过早的状态进行实验。同时,由于LLC在开关频率fs大于谐振频率fr工作状态下,即电流连续模式工作模式,副边无法实现零电流关断,效率较低,一般需要避免电路工作在此模式,因此实验设定稳定工作点于开关频率小于谐振频率处。
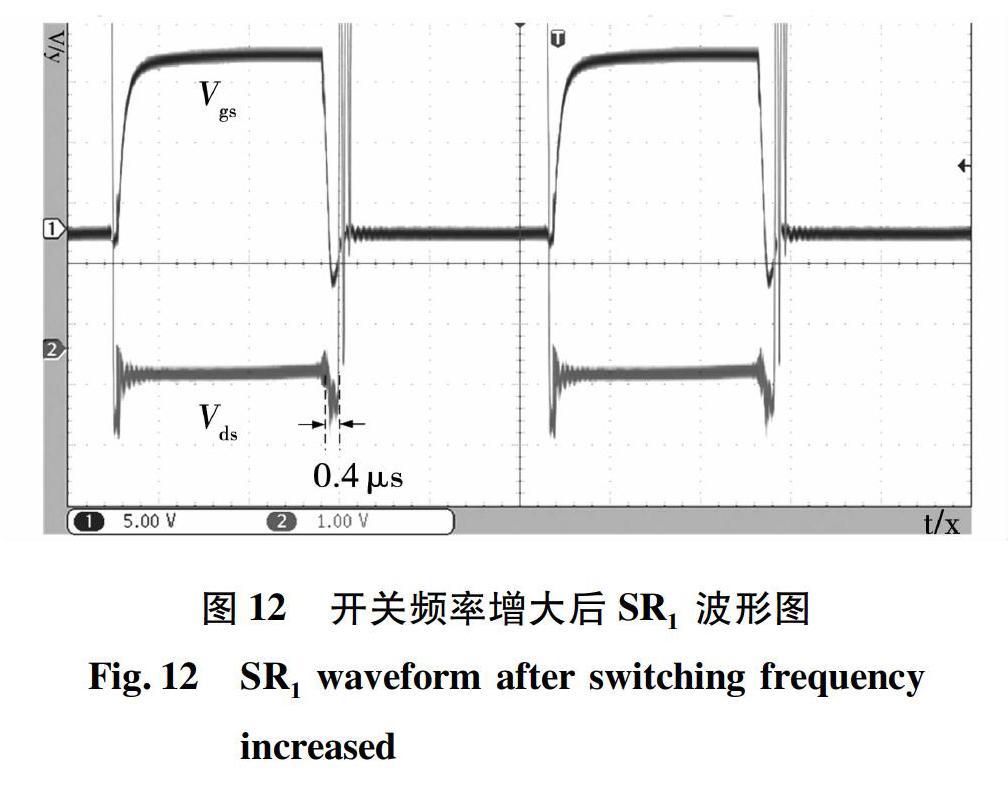
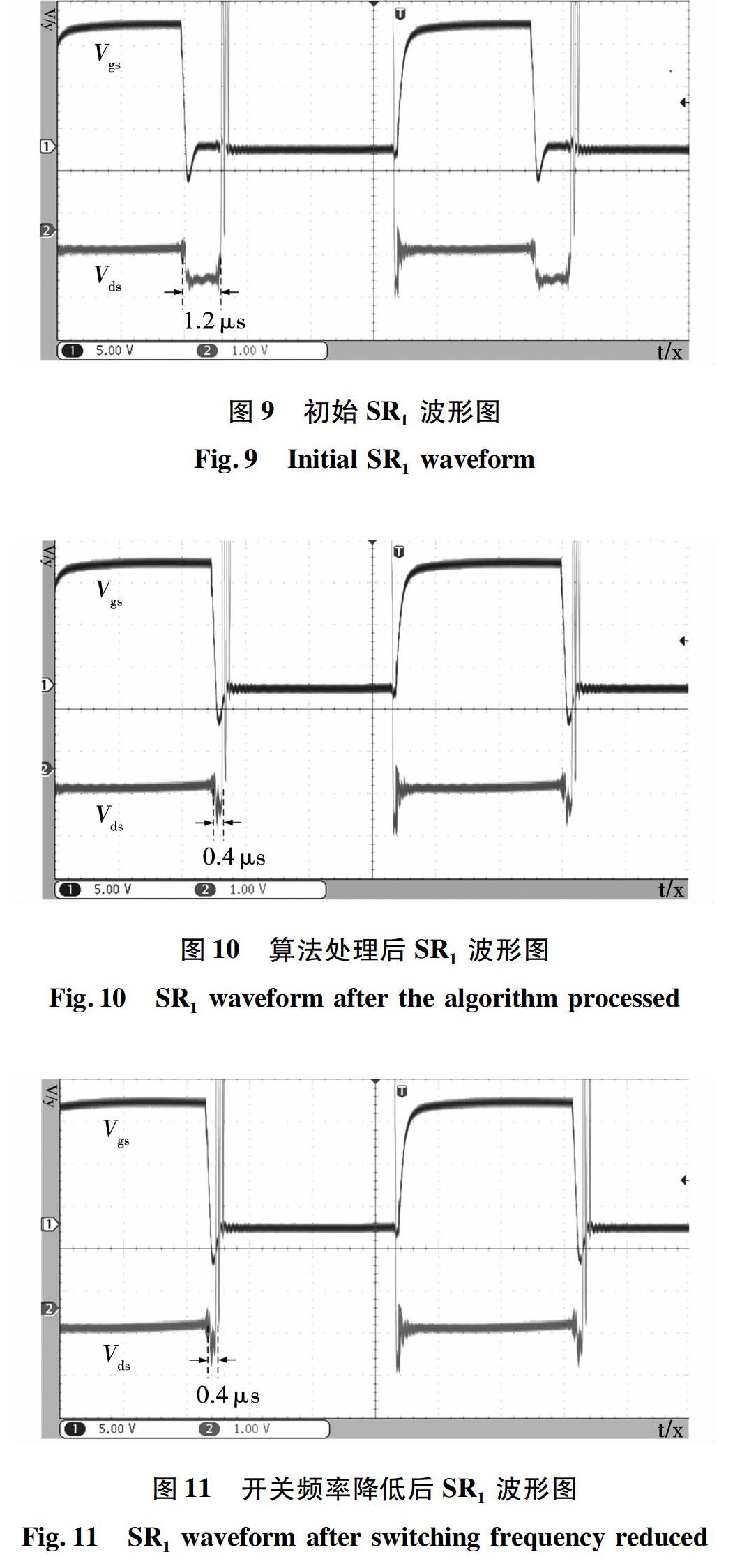
实验围绕电路稳定工作点附近进行。图9为不经过图3算法处理的同步整流管SR1实验波形,图10为算法处理后的SR1实验波形,开关频率均为90 kHz;图11为开关频率降低后的SR1实验波形,开关频率为85 kHz;图12为开关频率增大后的SR1实验波形,开关频率为95 kHz。其中,每幅实验波形图横坐标为2 μs/格。比较图9、图10的Vds波形可以看出,经过算法处理后SR1体二极管导通时间从1.2 μs减小到0.4 μs,效果显著,因此提出的驱动方式具有改善同步整流效果的作用;比较图10、图11、图12的Vds可以看出,在开关频率增大或者减小时,SR1的体二极管导通时间基本维持0.4 μs不变,且能稳定输出驱动电压,因此提出的驱动方式在电路暂态过程中能正常稳定工作,并且动态性能较好。
4 结 论
本文提出的数字同步整流驱动方式基于检测同步整流管Vds电压,通过判断体二极管的导通情况进行算法程序处理,最终输出理想的驱动信号。提出的方法电路结构简单,驱动信号精确,并且只需要一或两个开关周期就能得到理想的同步整流驱动信号,动态性能较好。采用该驱动方法的72 W半桥LLC谐振变换器验证了其有效性,样机效率达到97.5%。
参 考 文 献:
[1] JMarquart,S Nigsch,K Schenk.Design optimization for a high powerdensity,wide output,high frequency LLC resonant converter for lighting applications[C]//International Exhibition and Conference for Power Electronics,Intelligent Motion,Renewable Energy and Energy Management,10-12 May 2016,Nuremberg,Germany: VDE,2016: 2.
[2] K Naraharisetti.Design of half bridge LLC resonant converter using synchronous fectifier[C]//2015 IEEE International Conference on Electro/Information Technology (EIT),21-23 May 2015,Dekalb,IL,USA: IEEE,2015: 137.
[3] YUANB,XU M,YANG X,et al.A new structure of LLC with primary current driven synchronous rectifier[C]// 2009 IEEE 6th International Power Electronics and Motion Control Conference,17-20 May 2009,Wuhan,China: IEEE,2009: 1267.
[4] G K Y Ho,R Yu,B M H Pong.Current driven synchronous rectifier for LLC resonant converter with a novel integrated current transformer[C]//6th IET International Conference on Power Electronics,Machines and Drives(PEMD 2012),27-29 March 2012,Bristol,UK: IET,2012: 1.
[5] JIAO D Z,ZHANG J M,XIE X G,et al.A novel current driven synchronous rectifier[J].Power Electronics and Drive Systems,2003,1(1): 344.
[6] GUO X,LIN W,WU X.A novel current driven method for centertapped synchronous rectifier[C]//The 2010 International Power Electronics ConferenceECCE ASIA,21-24 June 2010,Sapporo,Japan: IEEE,2010: 449.
[7] G K Y Ho,R Yu,B M H Pong.Current driven synchronous rectifierwith saturable current transformer and dynamic gate voltage control for LLC resonant converter[C]// 2012 TwentySeventh Annual IEEE Applied Power Electronics Conference and Exposition(APEC),5-9 Feb.2012,Orlando,FL,USA:IEEE,2012:2347.
[8] WUX,HUA G,ZHANG J,et al.A new currentdriven synchronous rectifier for seriesparallel resonant (LLC) DCDC converter[J].IEEE Transactions on Industrial Electron,2011,58(1): 289.
[9] SRK2000datasheet: http://pdf1.alldatasheet.com/datasheetpdf/view/933733/STMICROELECTRONICS/SRK2000.html.
[10] FAN6208datasheet: http://pdf1.alldatasheet.com/datasheetpdf/view/414267/FAIRCHILD/FAN6208.html.
[11] W Feng,F C Lee,PMattavelli,et al.A universal adaptive driving scheme for synchronous rectification in LLC resonant converters[J].IEEE Transactions on Power Electron,2012,27(8):3776.
[12] WANGF,B A McDonald,J.Langham,et al.A novel adaptive synchronous rectification method for digitally controlled LLC converters[C]// 2016 IEEE Applied Power Electronics Conference and Exposition (APEC),20-24 March 2016,Long Beach,CA,USA: IEEE,2016: 334.
[13] 張国兴.LLC谐振变流器同步整流策略研究[D].杭州:浙江大学,2010.
[14] 李金龙.高效率数字电源谐振和同步整流控制策略研究[D].重庆:重庆大学,2014.
[15] FDP8442_F085datasheet:http://www.mouser.com/ds/2/149/FDP8442_F085-888971.pdf.
(编辑:张 楠)