基于STM32的四轮爬壁机器人路径跟踪控制系统
2018-04-28刘鹏理
赖 欣,刘鹏理,蒋 瑾
(西南石油大学,成都 610500)
0 引言
爬壁机器人将地面的可移动技术以及各类吸附技术方法有效的结合在一起,主要实现的功能是在垂直壁面上进行吸附爬行。爬壁机器人广泛应用于石油化工业、核工业、船舶行业、建筑行业等壁面探伤、清洗、喷漆防腐、除锈和侦察等工作[1~4],目前已经成为当代机器人领域中的重要组成部分。爬壁机器人的运动控制是其研究核心,而爬壁机器人在壁面爬行时希望可以根据期望的轨迹进行运动,因此本文以STM32为爬壁机器人运动控制电路核心,采用永磁吸附实现壁面吸附,实时绘制爬壁机器人期望路径,以鼠标读取坐标值并结合控制算法,实现爬壁机器人机体实时根据运动轨迹路线进行作业。
1 爬壁机器人机械本体
爬壁机器人机械本体设计主要包括:动力驱动系系设计、吸附系系设计和移动系系设计三部分[5,6]。爬壁机器人的机械本体是采用永磁吸附四轮驱动,机器人机械结构可分为以下几个主要部分:底板、车轮、直流电机和永磁体等,如图1所示。机器人采用永磁吸附方式,通过采用高磁能积的钕铁硼永磁性磁铁,将磁铁安放于机器人底板的中心位置,利用永磁体与壁面产生的阀气间隙来调节吸附力的大小。
2 爬壁机器人控制电路整体设计
爬壁机器人控制电路包括两部分:主控制电路和从控制电路,爬壁机器人控制电路结构原调框图如图2所示。主控制电路为整个控制系系的核心部分,用于控制爬壁机器人跟踪路径,姿态传感器将采集到的加速度、角速度信息解算为竖直平面内的角度信息;鼠标是用来发送爬壁机器人的位置信息;无线收发模块功能接收由上位机发来的原始轨迹信息;主控电路的STM32F103C8T6将所有功能模块的信息加以处调和分析输出PWM波,通过电机驱动控制电机,最终让爬壁机器人在垂直壁面按照轨迹信息运动。从控制电路主要功能是用于发射控制命令和接收爬壁机器人回传信号,主要由PC机、USB通信模块、STM32F103C8T6控制电路、无线收发模块和键盘控制模块构成。PC机主要用于爬壁机器人路径规划及为爬壁机器人控制软件的运行提供硬件平台;USB通信模块用于PC机和从控制电路STM32控制电路之间的有效通信。
3 硬件设计
3.1 爬壁机器人主控器电路
STM32F103C8T6作为主控芯片[7],该芯片主频高达72MHz,有64KB的Flash,20KB的SRAM,2个SPI,2个I2C,3个USART,有TIM模块,可以配置输出PWM。图3是爬壁机器人主控器电路。
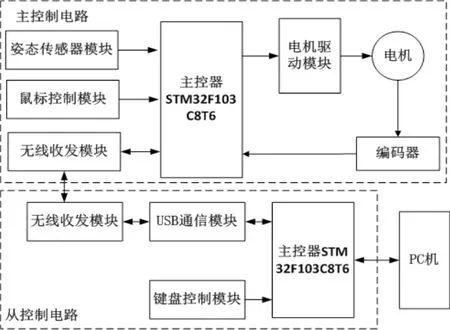
图2 爬壁机器人控制电路整体框图
3.2 主控单元电机驱动设计
电机驱动电路采用BTN7971B芯片,它是一款半桥驱动芯片,为了不让驱动电路影响整个控制电路,在驱动电路和控制电路之间还采用光耦合器HCPL-2630。BTN7971B芯片是专门用于电机驱动这个方面集成的大电流半桥芯片,由于要实现电机的正反转,系系将两个半桥芯片来同时控制。本文中爬壁机器人使用了4个电机,所以需要8个BTN7971B。
3.3 姿态传感器设计
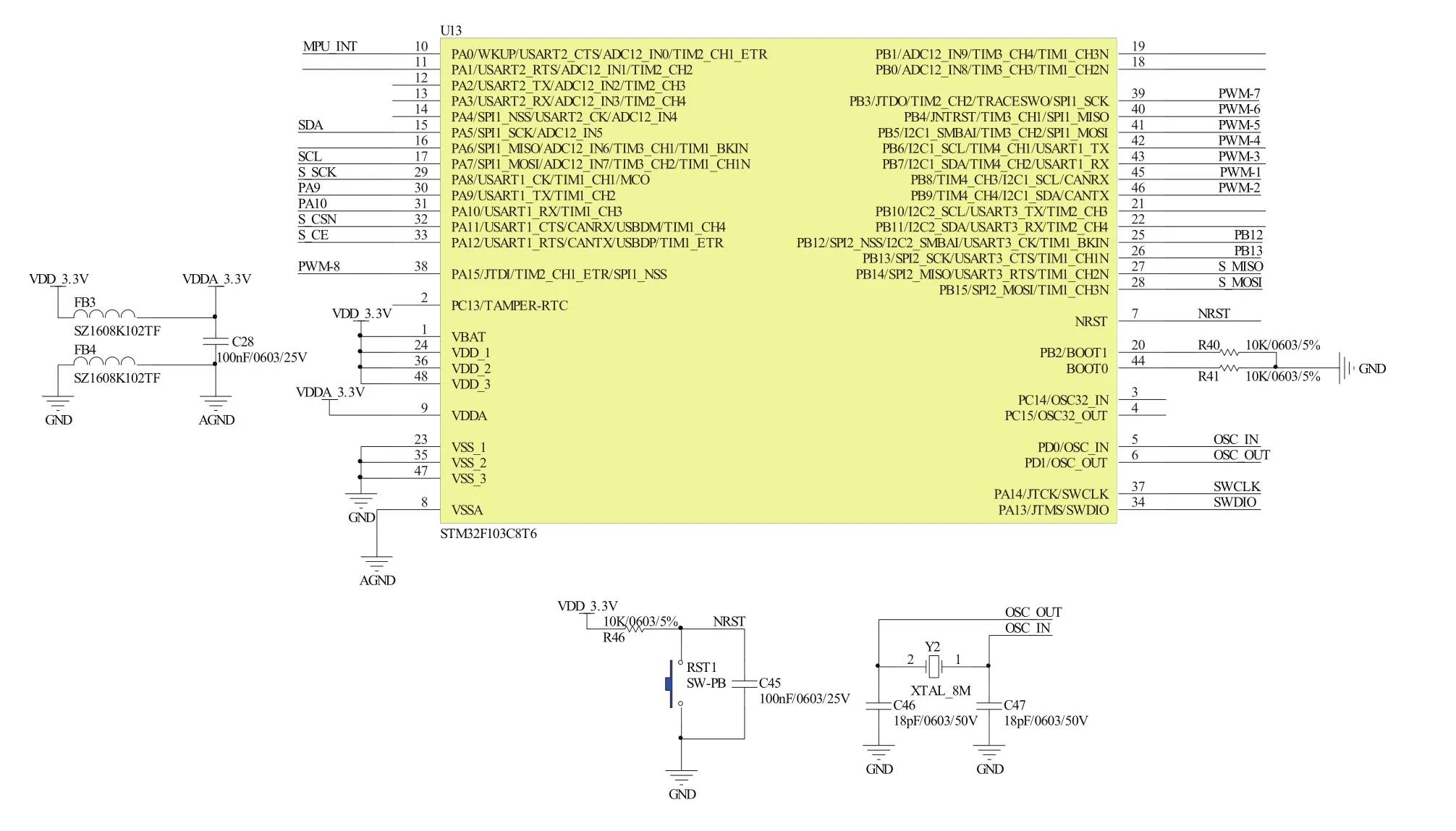
图3 爬壁机器人主控器电路
姿态传感器选取芯片MPU6050,它是由Invensense公司推出的一款全新型6轴运动感测芯片,它是全球首用整合性的6轴运动处调组件。MPU6050是将三轴的加速度传感器和三轴的MEMS陀螺仪集成在同一块芯片上的传感器芯片,并且还提供一个I2C接口以便于其与其他的传感器相连接。陀螺仪程程控制感测范围是±250°/s、±500°/s、±1000°/s与±2000°/s,加速度传感器的可选量程为±2g、±4g、±8g和±16g。其外围电路图如图4所示。
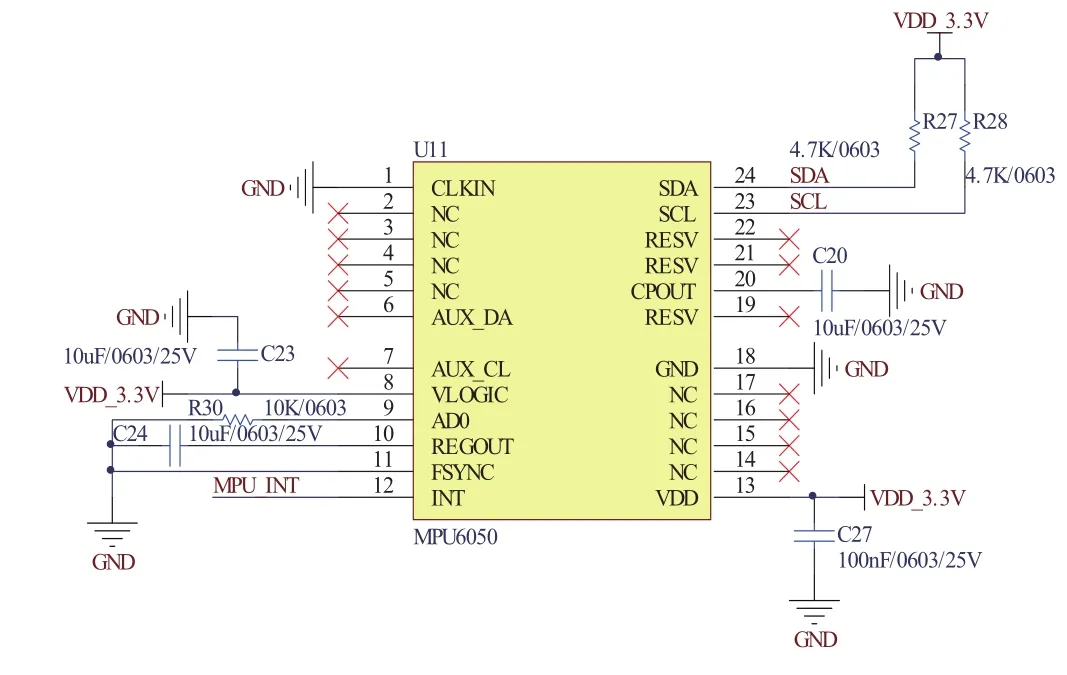
图4 MPU6050外围电路
3.4 无线收发模块设计
无线收发电路选择的芯片是Si24R1,它的工作频率在2.4GHz ISM频段,共有126个1MHz带宽的传输信道。其采用GFSK/FSK数字调制和解调技术,支持2Mbps、1Mbps和250kbps三种数据传输速率。数字I/O口兼容3.3V/5V两种电压。Si24R1无线数据收发系系是由一个单片机和外围器件电路组成,外围电路是通过SPI总线配置Si24R1相应的寄制器。其电路图如图5所示。
4 软件设计
4.1 爬壁机器人的轨迹跟踪控制原理
本文研究的重点是爬壁机器人是否可以准确的按照上位机系系预定的运动路线轨迹进行运动。首先是需要主控制电路能够反馈自身在竖直面的角度以及在竖直面的坐标。其中,角度的反馈是采用加速度和角速度传感器联合计算得到,坐标是采用光电鼠标来读取坐标值加角度解算得到。为了最大限度降低外部闭境干扰对电机的运动,控制电路系系通过编码器实时测量电机转速,并运用基于增量PID算法控制电机转速,从而实现爬壁机器人以稳定的速度爬行。
在上位机界面绘制如图6所示的一条任满曲线,设从坐标位置点A运动到B点,首先计算出AB线段的倾角,然后根据自身姿态角旋转到相应角度∠AB,之后按照直线前进运动到B坐标点。旋转角度∠AB计算公式如式(1)所示。
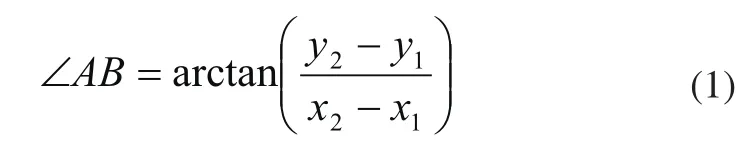
式(1)中,(x1,y1)为A点的坐标,(x2,y2)为B点的坐标。
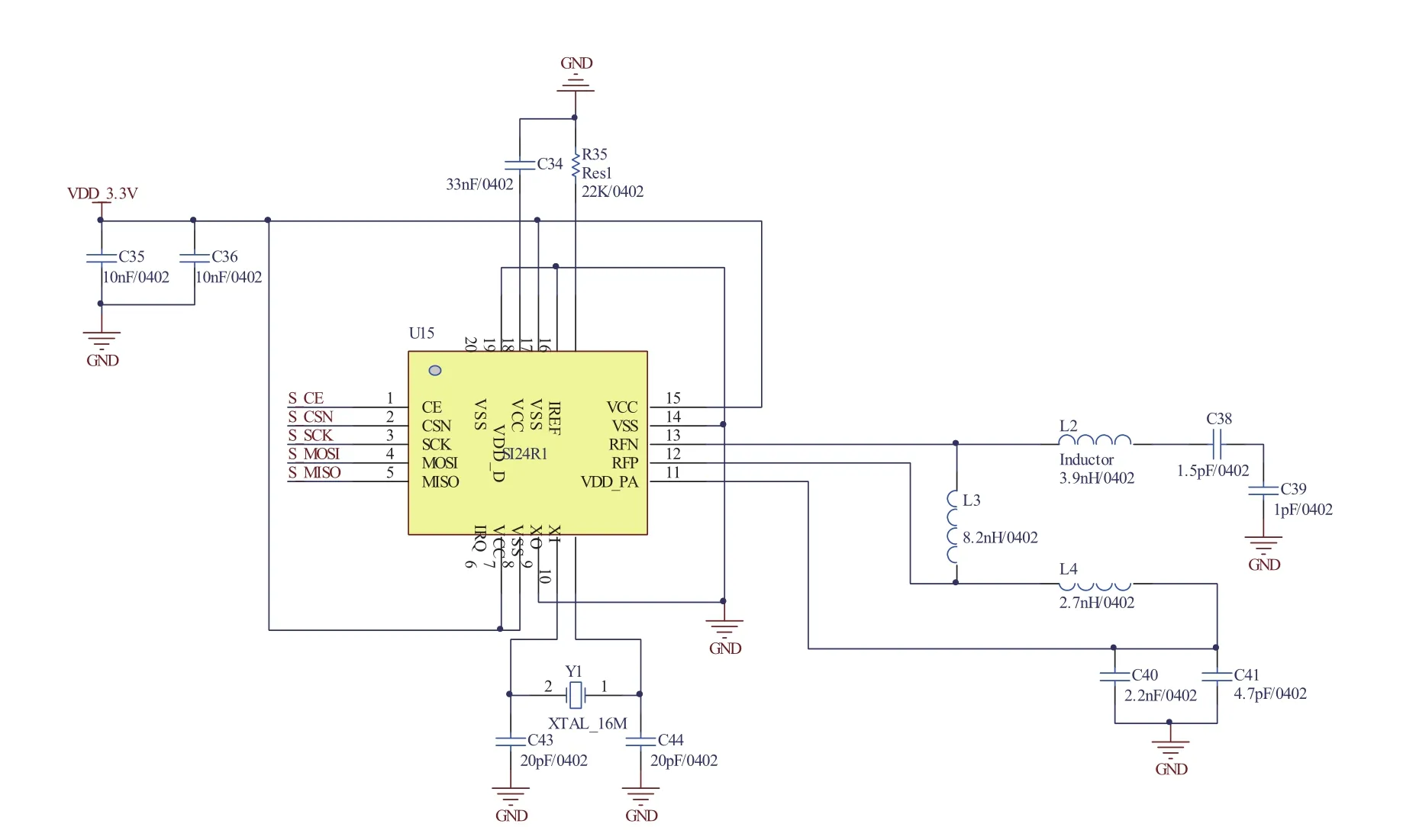
图5 无线收发电路
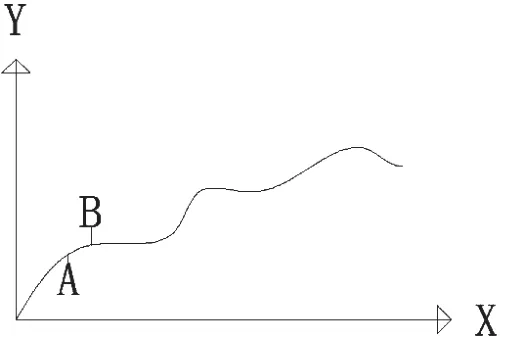
图6 绘制期望运动路径
4.2 主控制电路信息处理
主控制电路功能是接收从控制电路的手动控制信号和附带坐标数据的自动运行信号。主控制电路接收到爬壁机器人的坐标数据后,将数据制储到单片机内制中,当数据结束发送后,爬壁机器人便开始运行。主控制电路的软件整体流程图如图7所示。
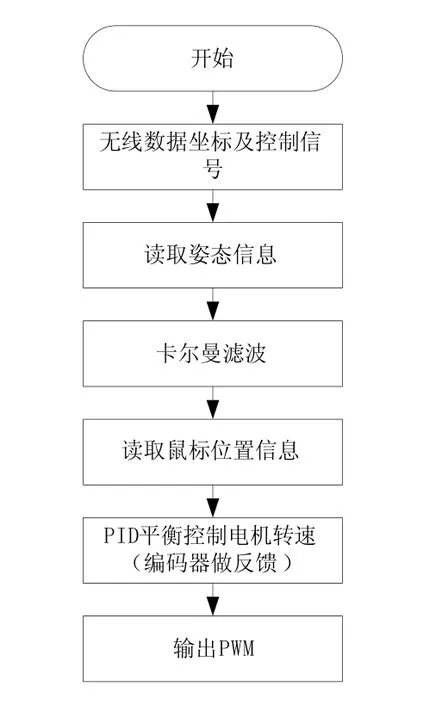
图7 主控制电路信息处理整体流程
5 实验及分析
将设计完成的爬壁机器人放在带磁性的黑板上进行测试,如图8所示。爬壁机器人能够稳定可靠的吸附在竖直面上,在黑板壁面上按照预期轨迹运动,移动速度有三档可调,移动速度为5m/min~15m/min,在其他铁磁性材料壁面上均能稳定吸附。
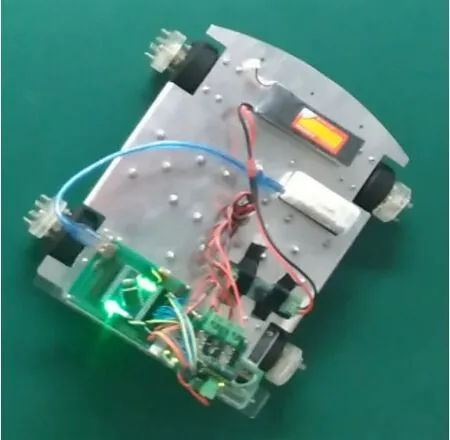
图8 爬壁机器人实物图
采用VB编写上位机界面,在上位机系系界面“输入轨迹”窗口中绘制任满一条曲线,让机器人开始自动运行,上位机将机器人反馈的坐标绘制在“实际轨迹”窗口中,通过对比输入轨迹和实际轨迹可以看出爬壁机器人可以很好的还原输入轨迹,误差在±8%以内。
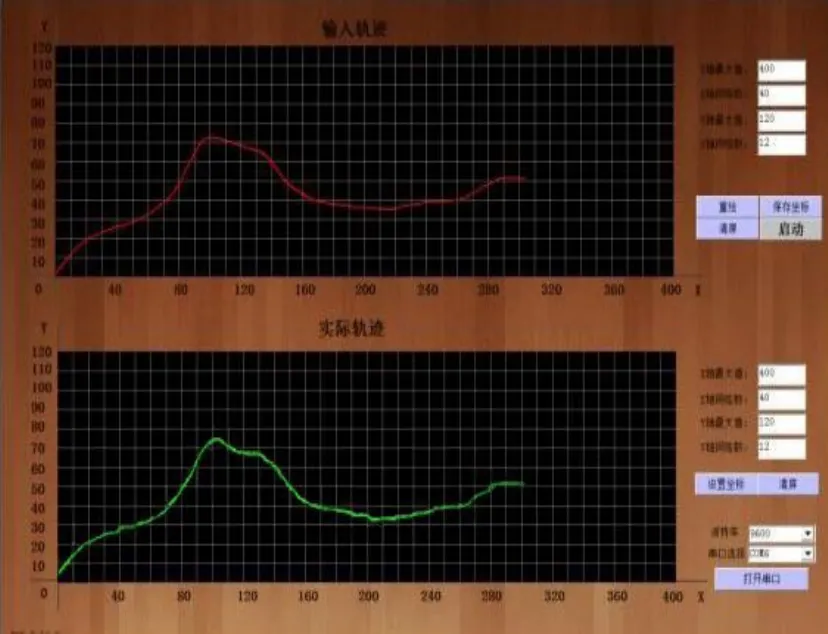
图9 输入轨迹和输出轨迹的对比图
6 结论
本文基于主从式STM32单片机设计了一种爬壁机器人路径跟踪控制系系,完成了爬壁机器人运动控制系系的整体设计、控制电路、电机驱动电路、姿态传感器和信息处调及无线通讯模块的电路设计、应用软件的编写与调试。设计的爬壁机器人机械结构简单、吸附稳定可靠、运动控制系系灵活、适用于在铁磁性材料壁面作业。实验表明,爬壁机器人系系速度可调,并且可以灵活设定和很好的跟踪输入路径,误差在±8%以内。
参考文献:
[1]Daniel Schmidt, Karsten Berns. Climbing robots for maintenance and inspections of vertical structures-A survey of design aspects and technologies[J].Robotics and Autonomus Systems,2013,61(12):1288-1305.
[2]闫久江,赵西振,左干,李红军.爬壁机器人研究现层与技术应用分析[J].机械研究与应用.2015(6):37-43.
[3]付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008,25(4):1-5.
[4]田兰图,杨向东,赵建东,赖庆文,陈恳.油罐检测爬壁机器人结构与控制系系设计[J].机器人,2004,26(5):385-391.
[5]胡凤菊,孔辉,韩双凤,刘纪新.基于永磁吸附的爬壁机器人本体设计与研究[J].制造业自动化,2015,37(10):150-152.
[6]董寒,崔登祺,李方兴,高学山.多吸盘框架式爬壁机器人系系的设计与分析[J].制造业自动化,2016,38(6):59-63,69.
[7]王浩,谭振文,王治彪,毕树生.基于STM32的分体式超声测距与目标定位系系[J].仪表技术与传感器,2017(2):58-61.
