Adaptive robust cubature Kalman filtering for satellite attitude estimation
2018-04-21ZhenbingQIUHuamingQIANGuoqingWANG
Zhenbing QIU,Huaming QIAN,Guoqing WANG
College of Automation,Harbin Engineering University,Harbin 150001,China
1.Introduction
High-accuracy attitude estimation systems play an important role in earth-orientation and satellite control.The Extended Kalman Filter(EKF)is the most widely applied filtering algorithm for attitude estimation.1With the combination of the information from the kinematic model with that from measurement,the EKF can theoretically provide a relatively reliableestimation solution.However,in practicalsatellite attitude estimation applications,especially in on-orbit satellites,the attitude sensor measurement error is complicated because of the influence of the space environment,such as occasional maneuver,meteorites and space junk impact and pressure unbalance.Owing to various interference,the noise caused by jitter,vibration,etc.will cause a serious attitude error.2,3There errors cannot be directly dealt with using the traditional filtering algorithm,and are also difficult to be eliminated by the general on-orbital calibration.Therefore,it is one of the main factors that affect high accuracy satellite attitude determination.4–6
One of the major problems for the satellite attitude determination via the Kalman Filter(KF)is having an algorithm which does not possess capability of the adaptation to the changing conditions of the state and measurement system.If the kinematic or measurement model used by the KF does not reflect the real information of attitude during various interference,the attitude estimator might diverge in a long term.Hence the KF algorithm that is employed as the attitude estimator must be strengthened robust by using an adaptive filtering approach.7,8Soken and Hajiyev7introduced robust unscented KF algorithms with the filter gain correction in the presence of measurement malfunctions for the attitude estimation process of a Pico satellite.The method works effectively if the measurements are not reliable.Zhong et al.9proposed a random weighting method in which the random weighting method and associated theory are established to resist the disturbances of the kinematic model’s systematic error on system state estimation.However,these methods cannot work effectively if state and measurement outliers occur simultaneously.
To deal with these outliers,several nonlinear methods have been proposed in the literature.10–13By making use of the Huber technique to correct the measurement covariance equations of standard unscented filtering,a Huber-based unscented filtering is derived and applied to vision-based relative navigation.10Developing a robust filter in a batch-mode regression form and solving it via the iteratively reweighted least squares algorithm,Gandhi and Mili proposed a generalized maximum likelihood type KF which can detect and bound the influence of both the state and measurement outliers.11Also,based on the generalized maximum likelihood perspective on the KF,a robust derivative-free algorithm named outliers robust unscented KF is proposed to handle both the state and measurement outliers.12However,numerous iterations were required for the above proposed algorithm.On the other hand,a derivative-free nonlinear filter named the Adaptive Robust Unscented Kalman Filter(ARUKF)was proposed to track a maneuvering vehicle in Ref.14,which can reduce the effect of the dynamics model error,the measurement model error,and the contaminated noise simultaneously.It is worth noting that this algorithm only needs fewer iterations.
To balance the contributions of the kinematic model information and the measurements to the state vector estimates,one effective adaptive filter method is to in flate the predicted state covariance through introducing a fading factor.15–17Yang and Gao15proposed an optimal adaptive factor based on the predicted residual vector,and had successfully applied the method in the field of geodesy.Another effective fading KF algorithm is strong tracking KF.In order to overcome the shortcomings of a single fading factor KF,Geng and Wang16proposed multiple fading factors KF to increase the predicted covariance component for the state parameters individually.
In this paper,the proposed attitude estimation approach,based on a filter developed by Arasaratnam et al.18,is shown as an alternative to the Unscented Kalman Filter(UKF).This filter approach,which they call the Cubature Kalman Filter(CKF)19,has several advantages over the EKF and UKF,including:(A)by using third-degree spherical-radial cubature rule to numerically compute Gaussian-weighted integrals,the probability distribution of the approximation nonlinear transformation is better than that of EKF and UKF;(B)it does not entail any free parameter;(C)with similar computational complexity as the EKF and UKF,the third-degree CKF will obtain more accurate and stable estimation results in highdimension systems(more than three);(D)it also avoids that the requirement of system model must be differential in the EKF.In addition,the attitude kinematics equation based on quaternion description has more advantages than other description methods for satellite attitude updating.20,21However,the quaternion must obey a normalization constraint,which may lead to singular covariance.An alternative approach employed in this paper utilizes three-dimensional Generalized Rodrigues Parameters(GRPs)to represent the quaternion error vector,the updates are performed using quaternion multiplication,and then the normalization constraint will be maintained.22In this paper,two other adaptive robust filtering algorithms for attitude estimation systems are proposed to fight against the dynamics model error and the measurement model error that exist simultaneously in the attitude estimation system.The main contributions of this paper are summarized as follows:(A)the cost function of the predicted residuals and strong tracking robust nonlinear filtering algorithm is deduced in detail.These derivations provide a theoretical basis for introducing adaptive factors into nonlinear filtering frameworks,and explain the feasibility of the proposed algorithm.(B)Two different adaptive robust filtering algorithms,one with the optimal adaptive factor and the other with multiple fading factors,are developed.The derivation process and the calculation procedure of the two kinds of adaptive factors are the theoretical basis for the proposed algorithm.The entire adaptive robust cubature KF algorithm procedure is also given.(C)In order to satisfy the quaternion normalization constraint,a three-dimensional generalized Rodrigues parameters are introduced to represent a local attitude error.The robust adaptive cubature KF for satellite attitude estimation system is derived.(D)The proposed adaptive robust filtering algorithms are implemented on a nonlinear attitude estimation system in real time.The simulation results for several typical scenarios are satisfactory.
The organization of this paper proceeds as follows.Section 2 introduces the attitude kinematics equation of motion and star sensor measurement models by using quaternions.Then,the adaptive robust CKF including the combination of robust estimation methodology with the adaptive factor based on the estimated covariance matrix of the predicted residuals in CKF framework and the former combining with multiple fading factors CKF are developed in Section 3.Subsequently,a CKF is derived for satellite attitude estimation using quaternion update with the three-dimensional GRPs representation in Section 4.The effectiveness of the proposed filtering algorithm for satellite attitude estimation is investigated in Section 5.Finally,some conclusions are drawn in Section 6.
2.Attitude estimation system and observation model
In this section,the attitude kinematics equation of motion and star sensor measurement models using quaternions are brief l y reviewed.The quaternion is a four-dimensional vector which is defined by q= [q1,q2,q3,q4]T= [ρT,q4]T,where ρ is the vector component of the quaternion andq4is the quaternion scalar part.The quaternion satisfies a normalization constraint given by qTq=1.By employing the quaternion,the kinematics equation is free of singularities,and another advantage is that successive rotations can be accomplished using quaternion multiplication,which is given by1,20
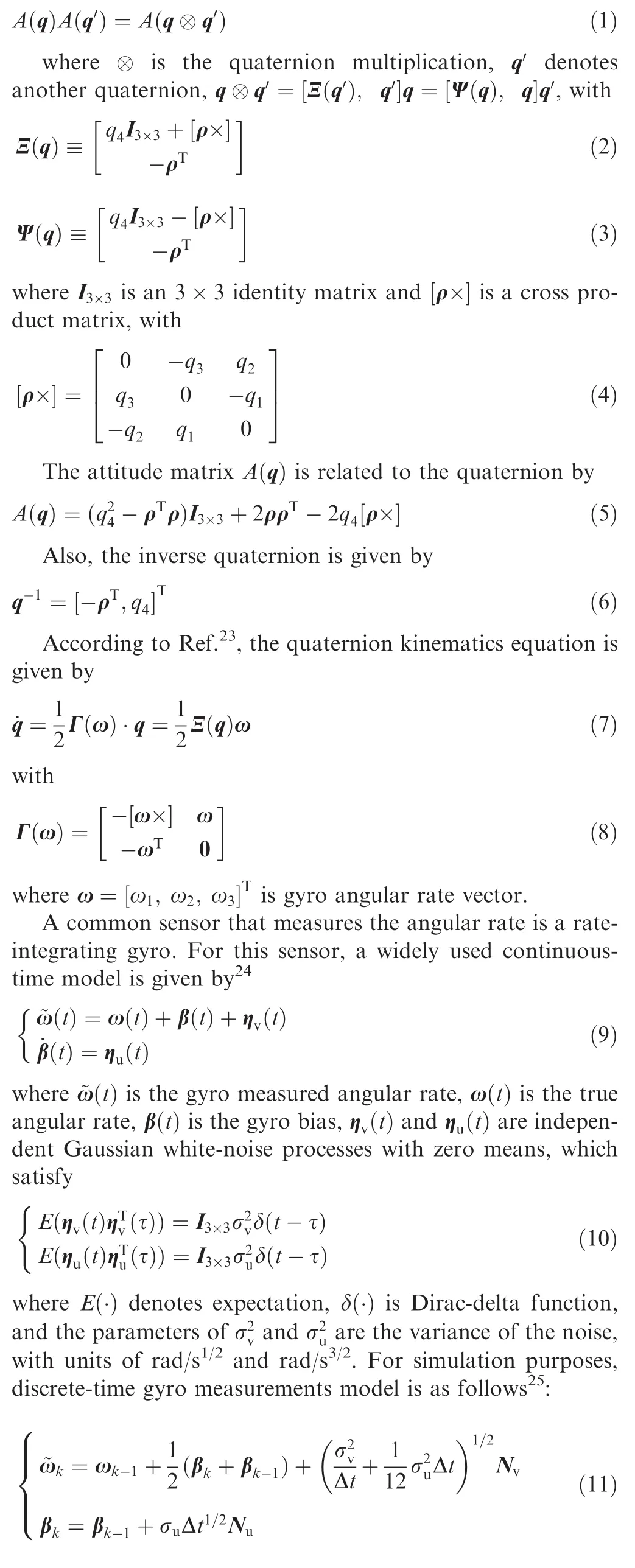
where the subscriptkdenotes thekth time-step,Δtis the gyro sampling interval,and Nvand Nuare zero mean Gaussian white-noise processes with covariance each given by the identity matrix.
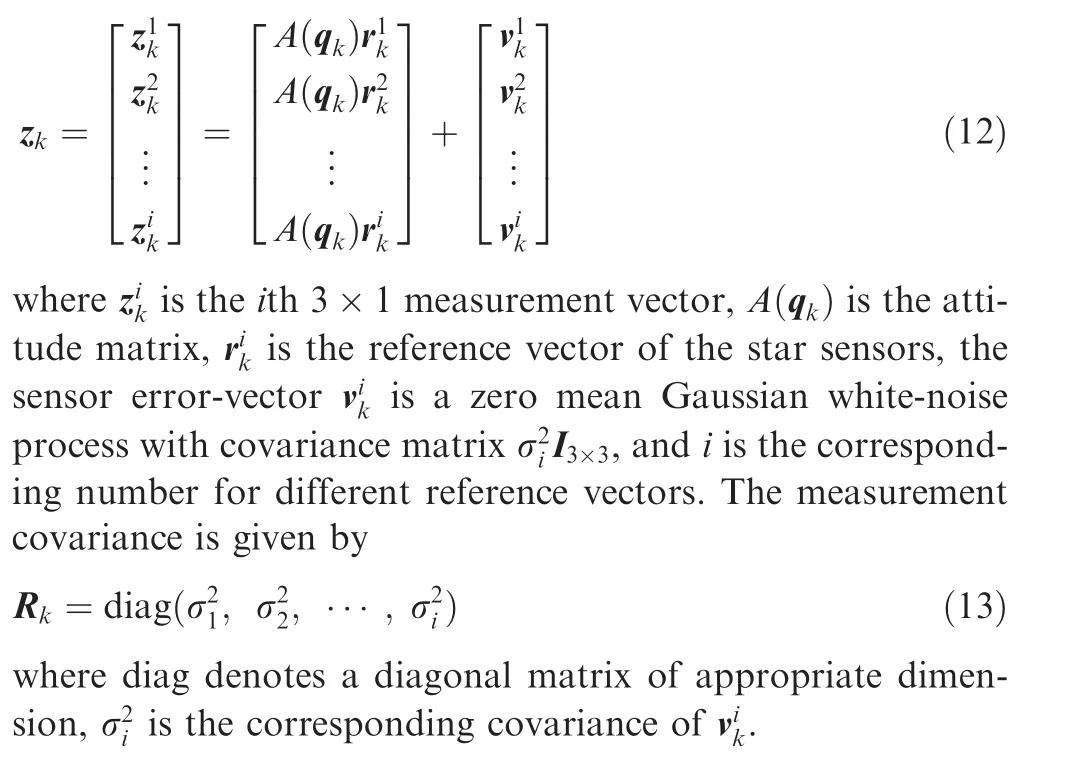
The star sensors can be modeled as
3.Robust adaptive cubature KF
In this section,the adaptive robust cubature KF is derived.The developed filtering algorithm includes the Robust Predicted residuals Cubature Kalman Filter(RPCKF)with the adaptive factor based on estimated covariance matrix of predicted residuals,and the Robust Multiple fading factors Cubature Kalman Filter(RMCKF)with the multiple fading factors based on strong tracking algorithm.Now,we consider the filter problem of a nonlinear dynamic system,whose process and measurement equations are defined by

3.1.Derivation of cost function of adaptive robust nonlinear if ltering
where xk∈Rnis the state of the dynamic system at discrete timek;f(·)andh(·)are known process and measurement functions,respectively;zk∈Rmis the measurement;wk-1and vkare independent process and measurement Gaussian noises with zero means and covariance Qk-1and Rk,respectively.
If the state-space model in Eq.(14)is accurate,from a Bayesian maximum likelihood perspective,Eq.(14)can be solved based on the following cost function:26

To enhance the robustness of the conventional CKF to model error,the adaptive filter is combined with Huber filter,and the cost function in Eq.(15)can be modified as
where αkis an adaptive adjustment matrix,and ρ(·)is the convex robust or penalty function.For instance,Huber10introduced a ρ function of the form as follows:10,27
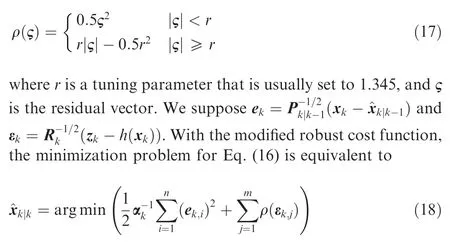
where ek,iis theith component of ekand εk,jis thejth component of εk.The solution to minimization problem Eq.(18)can be derived from the implicit equation as
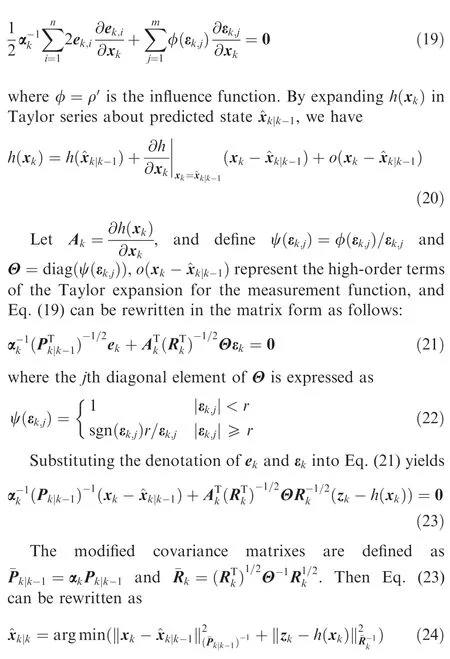
We can find that Eq.(24)has the same structure with Eq.(15),with the modified covariance matrix¯Pk|k-1and¯Rkas the difference.If αkand Θ are set to identity,the improving robust adaptive filtering algorithm is reduced to a standard KF.Therefore,embedding the modified covariance matrixes¯Pk|k-1and¯Rkinto the CKF framework is feasible without approximating the nonlinear function.Similar to Eq.(16),the cost function of the strong tracking robust filtering algorithm is given by

Next,we would introduce two types of adaptive filtering algorithm or two kinds of adaptive factor.
3.2.Optimal adaptive factor based on estimated covariance matrix of predicted residuals
It is assume that the measurement vector zkat timekis accurate,and if not,the robust filtering algorithm mentioned previously can be employed.In this case,the predicted residual vector υkmainly reflects the error magnitude of the kinematic model information,and the filter can provide its theoretical innovation covariance matrix.Comparing the difference between the evaluated covariance matrix and the related theoretical calculated one of the predicted residual vector,we can obtain an adaptive factor.Then the predicted residual vector is calculated by

The covariance matrix of the predicted residual vector υkin EKF framework can be expressed as
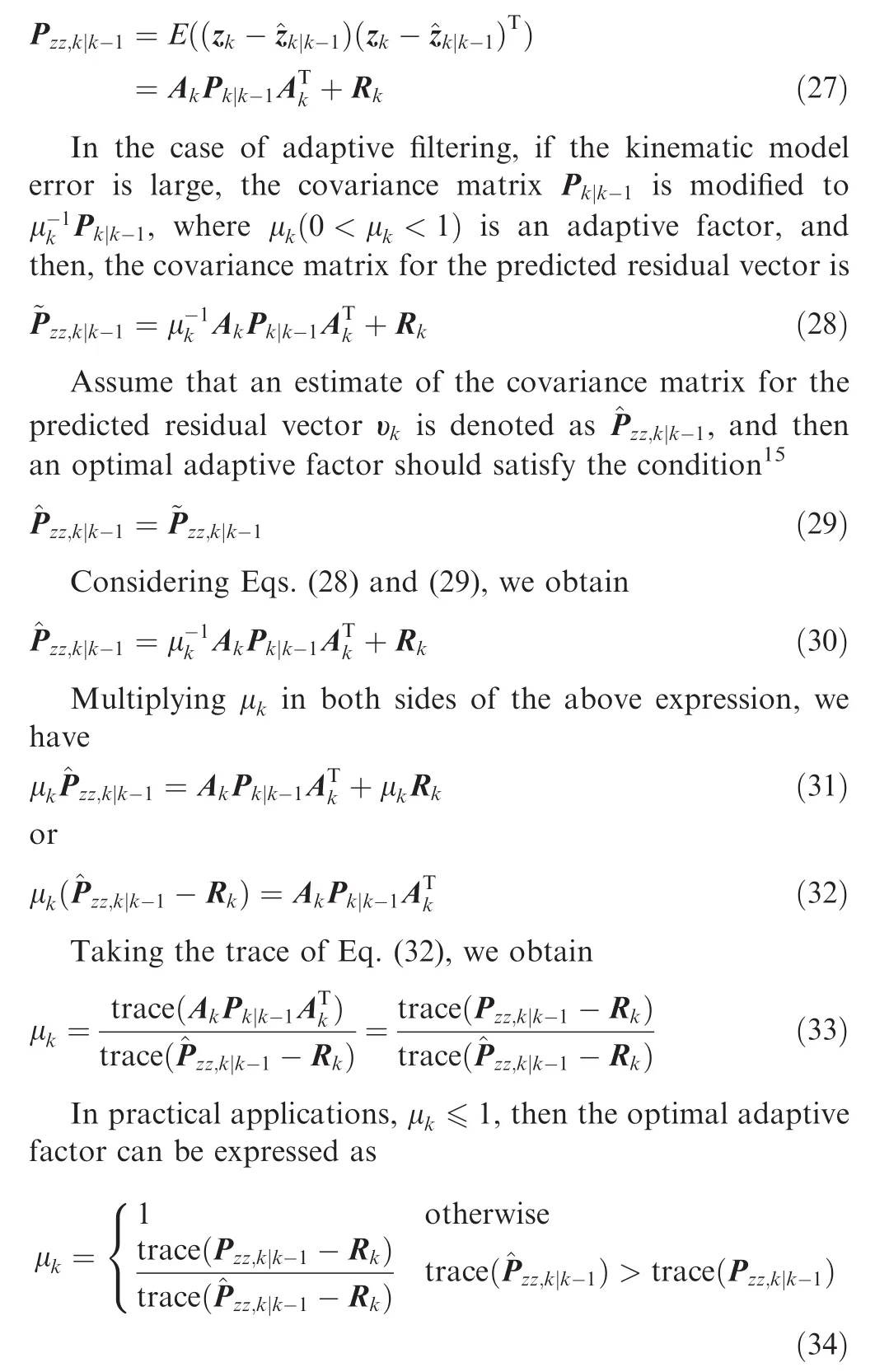
Furthermore,if the outliers exist in measurement,according to Eq.(24),Hubel filter technology can be utilized,and the covariance matrix Rkshould be modified as¯Rk.In addition,the numerator and denominator of Eq.(34)contain the same covariance matrix Rk.Omitting it,we can obtain an approximate optimal adaptive factor as

where the estimate covariance matrix^Pzz,k|k-1can be evaluated by two strategies.
Strategy 1.Estimator based on Sage’s windowing.Considering a window ofNepochs,the estimate covariance matrix is given by9
wherevi(i=1,2,···,N)is the random weighting adaptive factor that obeys Dirichlet distributionD(1,1,···,1).
Strategy 2.Estimator based on the predicted residual vector at the present epoch,which can accurately reflect the uncertainty of the model errors at discrete timek,that is

For the nonlinear Gauss filtering algorithm such as CKF,the covariance matrix of the predicted residual vector υkcan be obtained based on third-degree cubature rule.
3.3.Multiple-fading factors based on strong tracking algorithm
The synthesis of CKF and strong tracking algorithm leads to the strong tracking CKF.By introducing a constant fading factor,the integrated algorithm can perform the parameter adaptive adjustment for various dynamic characteristics.16,17However,a single fading factor cannot guarantee optimal filtering.For the complicated nonlinear multivariable systems,tracking performance and estimate accuracy of the KF vary for each variable.It is very difficult to determine the most appropriate fading factor.To overcome this problem and avoid asymmetry of the predicted error covariance,KF with two multiple fading factors is proposed to make each filter channel have different fading rates and increase filter performance(i.e.robustness and adaptability).Then,the following equation is used:

For the nonlinear system Eq.(14),the estimation error and prediction error are defined by

According to Ref.28,in order to take the higher order truncation errors into account and obtain an exact equality,an unknown diagonal matrix βk=diag(β1,k,β2,k,···,βn,k)is introduced,so that

We can find from the above expression that Eq.(38)is feasible to modify the predicted error covariance by introducing two multiple fading factors.

Lemma 1 is approximately true for a nonlinear system.A sufficient condition of Eq.(44)is as follows:

According to Ref.14,Eq.(45)is equivalent to

If there exists a fading factor that allows Eq.(46)to hold true,then Eq.(43)is approximately equivalent 0,namely the innovations satisfy approximately orthogonal.Substituting Eq.(38)into Eq.(46)yields

Considering that the measurement information of the nonlinear attitude estimation system does not contain gyro drift information,the measurement matrix satisfies the following condition:

wherelis attitude vector dimension.Given that
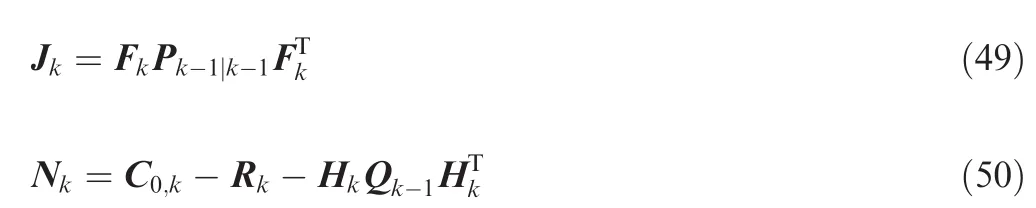
Substitute Eqs.(48)and(49)into the left-hand side of Eq.(47),and then

Below,we summarize the robust adaptive cubature KF algorithm.
3.4.Robust adaptive cubature KF algorithm
The entire robust adaptive cubature KF algorithm with adaptive factor based on predicted residual is presented as follows:

Time update:
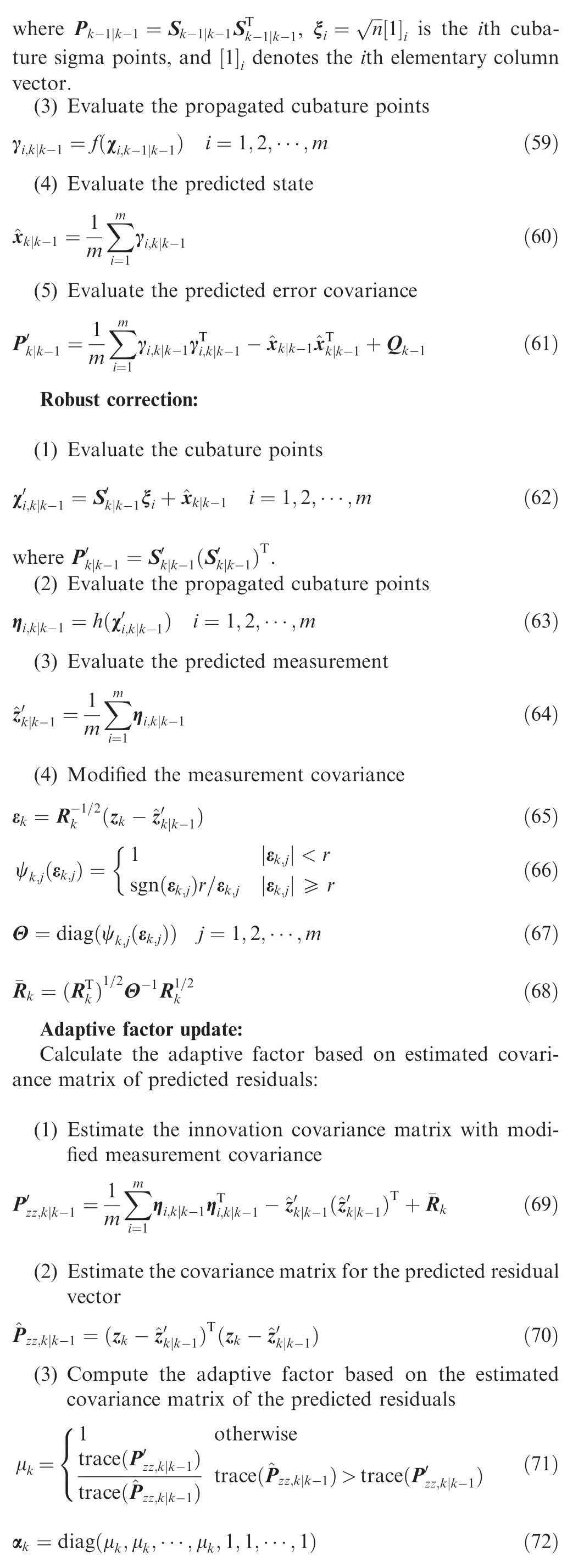
If the step of the adaptive factor update is replaced by the calculation process of multiple fading factors,we can obtain the robust adaptive cubature Kalman filtering algorithm with multiple fading factors based on strong tracking.
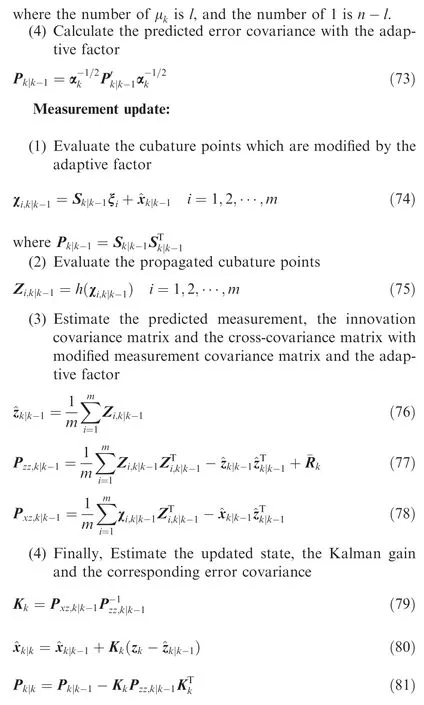
Remark 1.The calculation process of Eq.(72)is similar to Eq.(54),because the observation information of the nonlinear attitude estimation system does not include gyro drift information,and for the sake of simplicity,Eq.(70)is calculated using the Strategy 2.In addition,the predicted error covariance from Eq.(73)is computed in such a way that it satisfies symmetry.
4.Cubature Kalman filter for satellite attitude estimation
Quaternions are widely used in attitude estimation since no singularity is present;however,referring to Eq.(60),the predicted quaternion mean is derived employing an averaged sum of quaternions,and no guarantee can be made that the resulting quaternion will have unit norm.In order to satisfy this constraint for the updating quaternion or its error,Quaternion-GRPs are introduced to represent an attitude

We then modify the measurement noise covariance Rkusing Eqs.(62)–(68),and compute the adaptive factor using Eqs.(69)–(72).After the measurement,update have been performed,and the state estimate can be represented by
where δqk= [δρTk,δq4k]Tis transformed by Eqs.(84)and(85),and δ^pkis reset to zero before the next propagation.
5.Simulation results
In this section,several test cases are investigated using the satellite attitude estimation example.To illustrate the performance of the proposed robust adaptive filtering algorithms,the Multiplicative Extended Kalman Filter(MEKF)1,the UnScented QUaternion Estimator(USQUE)22and ARUKF14are implemented for comparison.The corresponding parameters of the GRPs are set toa=1 withf=422,with ζ=7.765 in Eq.(56),and the other simulation parameters of gyro and star sensor are listed in Table 1.For a fair comparison,a 100-run Monte-Carlo simulation is made for each case.The entire simulation process lasts 3000 s.In addition,in order to quantify the performance of various estimators,we use the Root Mean Square Error(RMSE)and Accumulative RMSE(ARMSE)of the attitude vector.The RMSE at timekis defined by32

Table 1 Simulation parameters of gyro and star sensor.

where Aaei(k)denotes the attitude error vector at theith Monte-Carlo run.Then,the ARMSE is given by18

whereNtrepresents the number of measurements used for comparison.
5.1.Case 1
Suppose that the initial attitude angle of a satellite is[0,0,0]T,and the parameters of gyro and star sensor are assumed to be as shown in Table 1.In case 1,a small state mutation Δq= [0.005,0.005,0.005,0.005]Tis introduced at epochs of 16,1360,and 2750 s.The simulation results are shown in Figs.1 and 2,Tables 2 and 3.
Fig.1 illustrates the comparison of the RMSEs of the attitude angles among the MEKF,USQUE,ARUKF,RPCKF and RMCKF algorithms.The RMSE curves of the filters exhibit large jumps when the state mutation is introduced,which can be explained as the mismatch between the used dynamics model and the real situation.When the first state mutation occurs,the MEKF and USQUE converge slowly.With the state mutation continues to occur,their performance is severely degraded,and the estimation performance of the MEKF is the worst since the first-order approximation cannot effectively capture the state mutation in Case 1.By contrast,the ARUKF,RPCKF and RMCKF can rapidly converge and maintain a high estimation accuracy,even if the state mutation occurs repeatedly.Furthermore,compared with the ARUKF,the RPCKF and RMCKF remain higher precision and stability,and the accuracy and stability of the RMCKF are higher than those of the RPCKF.This is owing to the introduced optimal adaptive factor and two multiple fading factor matrices.The optimal adaptive factor can accurately track the uncertainty of the model errors at the present epoch compared with the ARUKF algorithm.Moreover,two multiple fading factor matrices make the different filter channels have different fading rates and guarantee the RMCKF solid robustness as well as higher estimation accuracy compared to the other algorithms.

Fig.1 RMSE in attitude angles for Case 1.

Fig.2 Comparison of attitude angles’errors among ARUKF,RPCKF and RMCKF in Case 1.
Fig.2 shows the attitude angles’errors of the roll,pitch and yaw of the ARUKF,RPCKF,and RMCKF in Case 1.From Fig.2,we can see that all the attitude angles’errors of theRPCKF and RMCKF are smaller and more stable than those of the ARUKF algorithm.In addition,the attitude angles’errors of the RMCKF remain higher precision and stability compared to the RPCKF algorithm.

Table 2 Steady state means of RMSE of filters in Case 1.

Table 3 ARMSE of attitude angles.
The means of RMSE of the roll,pitch and yaw fork= {1:15,26:1359,1370:2749,2760:3000},together with the norm of the means of RMSE are listed in Table 2.As can be seen from Table 2,the RPCKF and RMCKF reduce about 12.86%and 70%of means of RMSE compared to the ARUKF algorithm respectively.Moreover,from the ARMSE of attitude angles shown in Table 3,the estimation performance of the RPCKF and RMCKF is also superior to that of the other algorithms.
5.2.Case 2
In this case,the state mutation(the same as that in Case 1)and measurement outlier occur simultaneously,i.e.,Δzk=0.005×ones(numel(zk),1) atepochsof16,1360 and 2750 s,numel(zk)returns the number of array zkelements.The other simulation conditions are the same as those in Case 1.
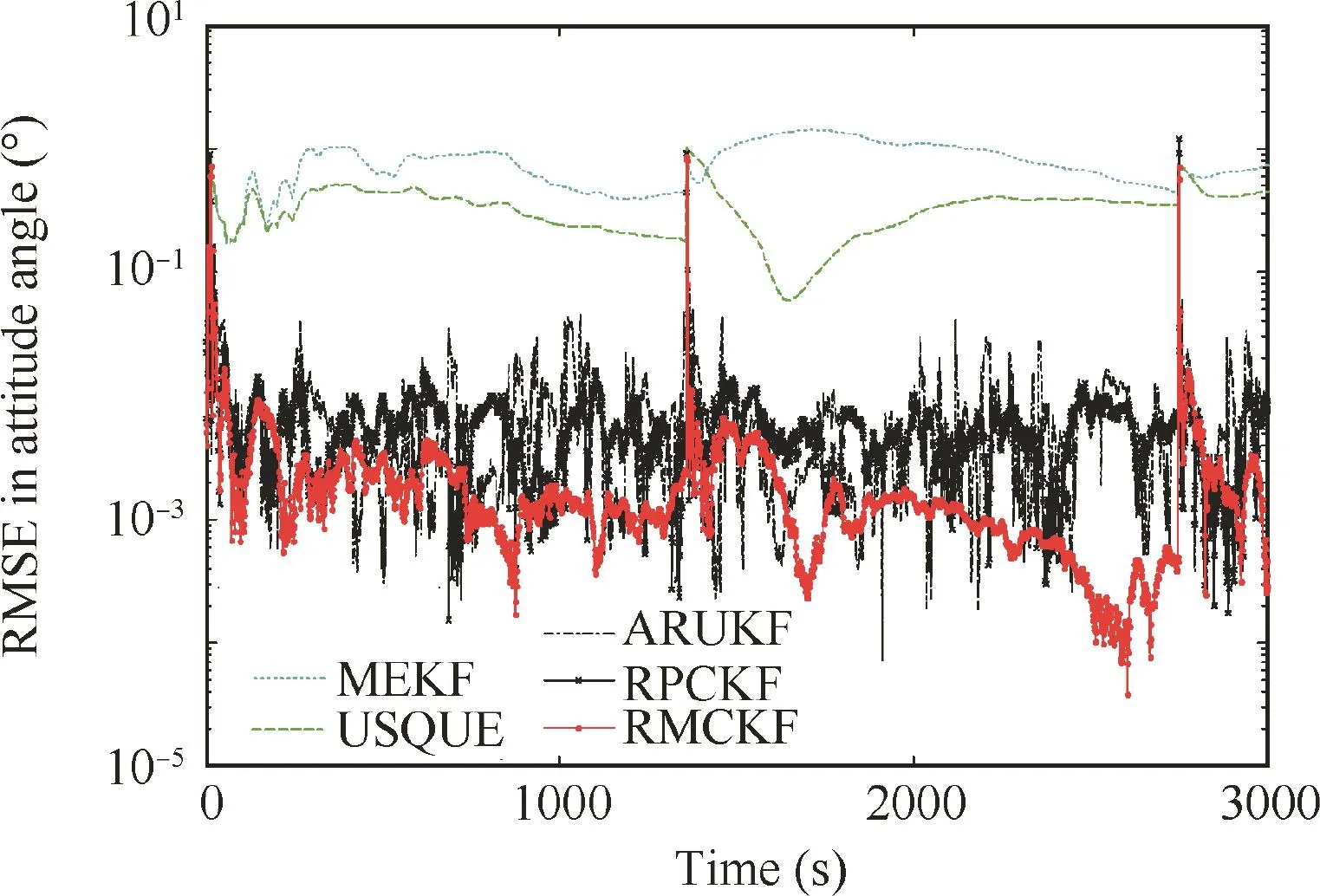
Fig.3 RMSE in attitude angles for Case 2.

Fig.4 Comparison of attitude angles’errors among ARUKF,RPCKF and RMCKF in Case 2.
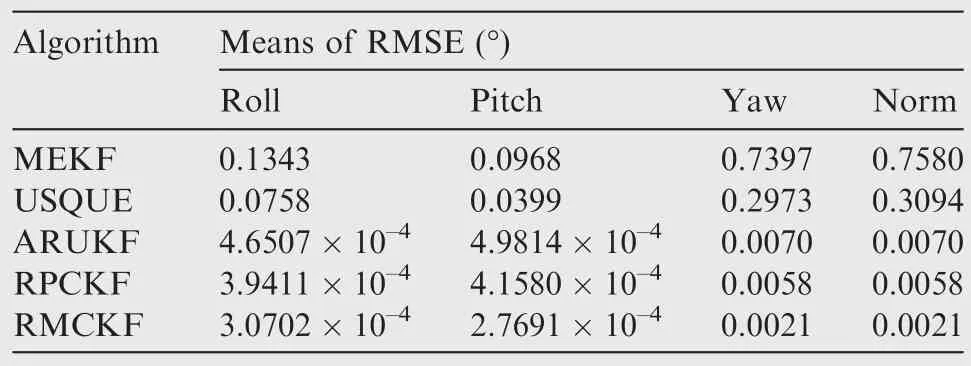
Table 4 Steady state means of RMSE of filters in Case 2.
Fig.3 presents the RMSEs of the attitude angles of the MEKF,USQUE,ARUKF,RPCKF and RMCKF algorithms in Case 2.Even the state mutation and measurement outlier occur simultaneously,the RPCKF and RMCKF can effectively work and provide higher estimation accuracy compared with the other algorithms.Under the same conditions,the MEKF and USQUE converge slowly and tend to diverge.It clearly shows the effectiveness of the robust estimation methodology and the adaptive fading factor to the measurement model error and dynamics model error.From Fig.4,it can be further explained that the RPCKF and RMCKF have the lower RMSEs of the attitude than the other algorithms in this case,and the RMCKF maintains higher accuracy and stability compared with the RPCKF algorithm.In addition,as shown in Tables 3 and 4,the RMCKF presents the best attitude estimation performance in this case,followed by the RPCKF,ARUKF,USQUE and then MEKF.
5.3.Case 3
Apart from state mutation and measurement outlier as in Case 2,unknown interferences always arise in attitude estimation systems due to the influence of the jitter or vibration,which leads to attitude error.Then,this part of experiment is made to discuss the corresponding performance with related algorithm when the model uncertainty of this type exists.In the present case,unknown interference in the gyro measurement model is supposed to Δω(t)=sin(2πt/150)× [1 ,-1 ,1]Trad/s at epochs of 16,1360 and 2750 s.
The RMSE in attitude angles for Case 3 is shown in Fig.5.As can be seen,the convergence performance of the MEKF and USQUE is shown to be even worse.The RPCKF and RMCKF,however,perform much better than the MEKF,USQUE and ARUKF algorithms,and the reason has been analyzed in the previous case.On the other hand,Fig.6 shows that the stability of the ARUKF is poor compared with the RPCKF and RMCKF methods.It also indicates that the RPCKF and RMCKF can effectively deal with the unknown interference in the gyro measurement model as in Case 3 from Tables 3 and 5.

Fig.5 RMSE in attitude angles for Case 3.

Fig.6 Comparison of attitude angles’errors among ARUKF,RPCKF and RMCKF in Case 3.

Table 5 Steady state means of RMSE of filters in Case 3.

Fig.7 RMSE in attitude angles for Case 4.
5.4.Case 4
In this case,a more dramatic situation is assumed by using the same simulation conditions as in Case 3,but setting the initial estimation errors to-50°,50°and 160°for each axis,and initial attitude covariance to (50°)2.
Fig.7 investigates the RMSE in attitude angles of the f i ve algorithms for Case 4.The MEKF never provides a converged solution for this case since the first-order approximation cannot adequately capture the large initial estimation errors and other model errors in this case.The ARUKF,RPCKF and RMCKF algorithms can be better convergent in this case.In addition,as can be seen from Figs.7 and 8,Tables 3 and 6,the filter performance of the RPCKF and RMCKF algorithms outperforms the other filter methods for this case.This also shows the importance of the highorder terms used for computing Gaussian-weighted integrals for convergence.
5.5.Case 5
In practical spacecraft attitude determination applications,the attitude sensor measurement error is complicated,and various interference may exist at the same time.Therefore,in this case,the interference in the gyro measurement model is assumed to Δω(t)=0.5(sin(2πt/150)+cos(2πt/150))× [1 ,-1 ,1]Trad/s.In addition,the simulation conditions and the other abnormal circumstances are the same as in Case 4.
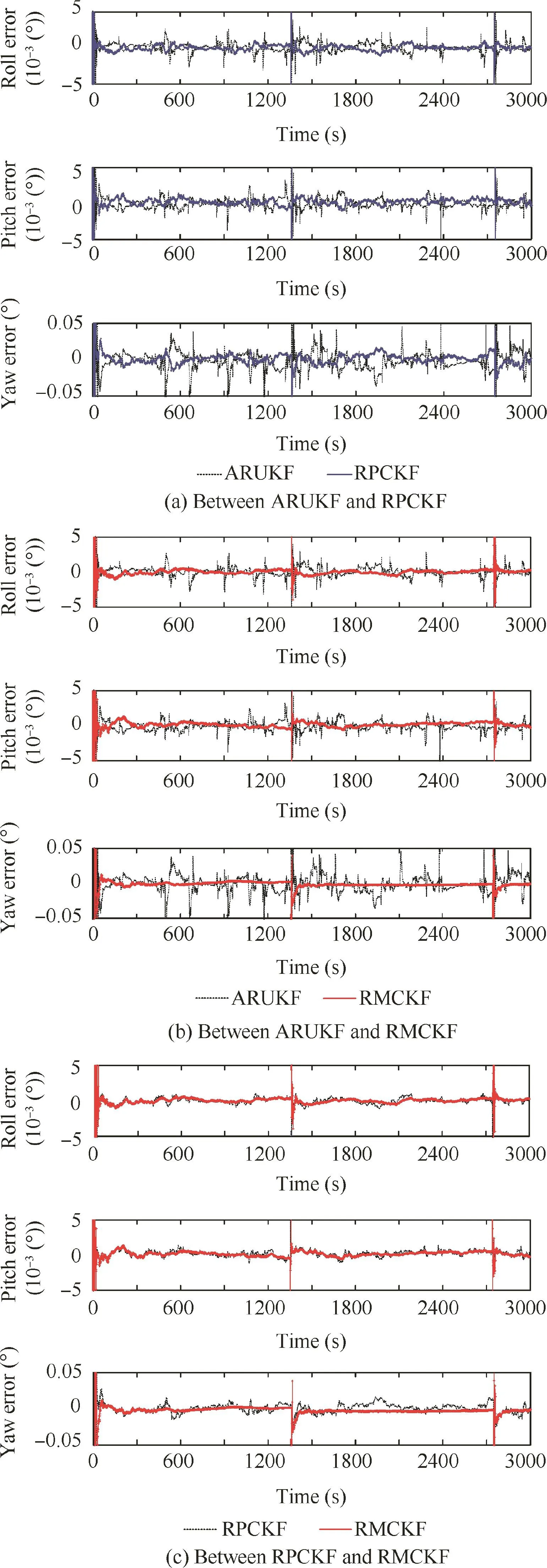
Fig.8 Comparison of attitude angles’errors among ARUKF,RPCKF and RMCKF in Case 4.
A plot of the RMSE in attitude angles for Case 5 is shown in Fig.9.We can see from the figure that the MEKF does not successfully work,and f l uctuates significantly.Although the ARUKF can effectively track the movement of the attitude,it requires more time to converge,and is accompanied by manysmall jumps compared with the RPCKF and RMCKF algorithms from Figs.9 and 10.This is due to the interference in the gyro measurement model assumed in this case.The ARMSE and steady state means of RMSE fork= {11:15,26:1359,1370:2749,2760:3000} are listed in Tables 3 and 7.As can be concluded from the tables,the RPCKF and RMCKF still maintain higher estimation accuracy compared with the other three algorithms.In addition,the RMCKF has the highest precision and the best effect even with the state mutation,measurement outlier,unknown interference in the gyro measurement model and larger initial estimation errors.

Table 6 Steady state means of RMSE of filters in Case 4.
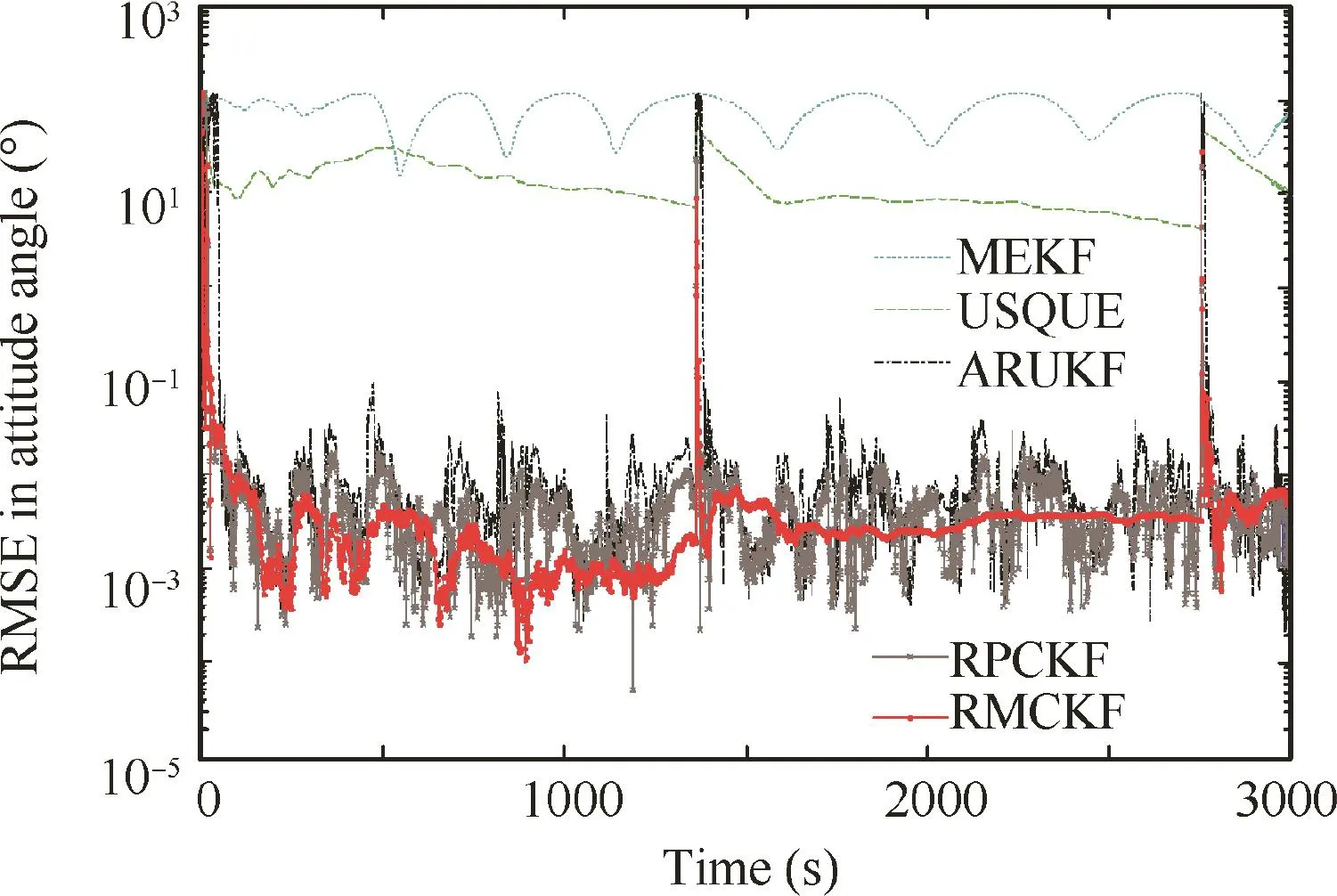
Fig.9 RMSE in attitude angles for Case 5.
6.Conclusions
In this paper,the adaptive robust filtering algorithm for satellite attitude estimation using the cubature Kalman filter formulation is derived.In the proposed algorithms,the Hubelbased robust estimation methodology is employed to suppress the measurement model error,and two types of adaptive factor are introduced to reduce the effect of the dynamics model error and balance the contributions of the dynamics model information and the measurements on the state vector estimates.In order to satisfy the quaternion normalization constraint,three-dimensional generalized Rodrigues parameters are introduced to represent an attitude error for the averaged sum of quaternions.The RPCKF with the optimal adaptive factor based on the estimated covariance matrix of the predicted residuals,compared with MEKF,USQUE and ARUKF,has higher accuracy and stability for several typical scenarios.The RMCKF with two multiple fading factor matrices based on strong tracking algorithm far exceeds the above four algorithms in filter performance.In addition,the RPCKF has the least computational complexity compared with the ARUKF and RMCKF algorithms.
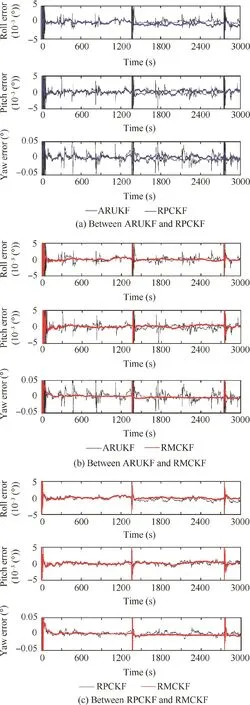
Fig.10 Comparison of attitude angles’errors among ARUKF,RPCKF and RMCKF in Case 5.

Table 7 Steady state means of RMSE of filters in Case 5.
Acknowledgements
This work was co-supported by the National Natural Science Foundation of China(No.61573113)and the Harbin Research Foundation for Leaders of Outstanding Disciplines,China(No.2014RFXXJ074).
1.Lefferts EJ,Markley FL,Shuster MD.Kalman filtering for space craft attitude estimation.JGuidControlDyn1982;5(5):417–29.
2.Cardillo GP,Mrstik AV,Plambeck T.A track filter for reentry objects with uncertain drag.IEEE Trans Aerosp Electron Syst1999;35(2):394–409.
3.Winkler S,Wiedermann G,Gockel W.High-accuracy on-board attitude estimation for the GMES sentinel-2 satellite:concept,design,and first results.AIAA guidance navigation control conference and exhibit;2008 Aug 18–21:Hawaii,USA.Reston:AIAA;2008.p.1–6.
4.Pittelkau ME.Kalman filtering for spacecraft system alignment calibration.J Guid Control Dyn2001;24(6):1187–95.
5.Schmidt U,Elstner C,Michel K.ASTRO 15 star tracker flight experience and further improvements towards the ASTROAPS star tracker.AIAA guidance navigation control conference and exhibit;2008 Aug 18–21:Hawaii,USA.Reston:AIAA,2008.p.1–8.
6.Wang JQ,Xiong K,Zhou HY.Low-frequency periodic error identification and compensation for star tracker attitude measurement.Chin J Aeronaut2012;25(4):615–21.
7.Soken HE,Hajiyev C.Pico satellite attitude estimation via robust unscented Kalman filter in the presence of measurement faults.ISA Trans2010;49(3):249–56.
8.Karlgaard CD,Schaub H.Adaptive nonlinear Huber-based navigation for rendezvous in elliptical orbit.J Guid Control Dyn2011;34(2):388–402.
9.Zhong Y,Gao S,Wei W,Gu C,Subic A.Random weighting estimation of kinematic model error for dynamic navigation.IEEE Trans Aerosp Electron Syst2015;51(3):2248–59.
10.Wang X,Cui N,Guo J.Huber-based unscented filtering and its application to vision-based relative navigation.IET Radar Sonar Navig2010;4(1):134–41.
11.Gandhi MA,Mili L.Robust Kalman filter based on a generalized maximum-likelihood-type estimator.IEEE Trans Signal Process2010;58(5):2509–20.
12.Chang LB,Hu BQ,Chang GB,Li A.Multiple outliers suppression derivative-free filter based on unscented transformation.J Guid Control Dyn2012;35(6):1902–6.
13.Karlgaard CD.Nonlinear regression Huber-Kalman filtering and fixed-interval smoothing.J Guid Control Dyn2014;38(2):322–30.
14.Wang YD,Sun SM,Li L.Adaptively robust unscented Kalman filter for tracking a maneuvering vehicle.J Guid Control Dyn2014;37(5):1696–701.
15.Yang YX,Gao WG.An optimal adaptive Kalman filter.J Geod2006;80(4):177–83.
16.Geng YR,Wang JL.Adaptive estimation of multiple fading factors in Kalman filter for navigation applications.GPS Solut2008;12(4):273–9.
17.Jwo DJ,Yang CF,Chuang CH,Lee TY.Performance enhancement for ultra-tight GPS/INS integration using a fuzzy adaptive strong tracking unscented Kalman filter.Nonlinear Dyn2013;73(1):377–95.
18.Arasaratnam I,Haykin S,Hurd TR.Cubature Kalman filtering for continuous-discrete systems:theory and simulations.IEEE Trans Signal Process2010;58(10):4977–93.
19.Arasaratnam I,Haykin S.Cubature Kalman filters.IEEE Trans Automat Contr2009;54(6):1254–69.
20.Shuster MD.A survey of attitude representation.J Astronaut Sci1993;41(4):439–517.
21.Kim SG,Crassidis JL,Cheng Y,Fosbury AM,Junkins JL.Kalman filtering for relative spacecraft attitude and position estimation.J Guid Control Dyn2007;30(1):133–43.
22.Crassidis JL,Markley FL.Unscented filtering for spacecraft attitude estimation.J Guid Control Dyn2003;26(4):536–42.
23.Crassidis JL,Markley FL,Cheng Y.Survey of nonlinear attitude estimation methods.J Guid Control Dyn2007;30(1):12–28.
24.Farrenkopf RL.Analytic steady-state accuracy solutions for two common spacecraft attitude estimators.J Guid Control Dyn1978;1(4):282–4.
25.Crassidis JL.Sigma-point Kalman filtering for integrated GPS and inertial navigation.IEEE Trans Aerosp Electron Syst2006;42(2):750–6.
26.Teixeira BOS,Chandrasekar J,Toˆrres LAB,Aguirre LA,Bernstein DS.State estimation for linear and non-linear equality constrained systems.Int J Control2009;82(5):918–36.
27.Durovic ZM,Kovacevic BD.Robust estimation with unknown noise statistics.IEEE Trans Automat Contr1999;44(6):1292–6.
28.Xiong K,Zhang HY,Chan CW.Performance evaluation of UKF-based nonlinear filtering.Automatica2006;42(2):261–70.
29.Zhou DH,Frank PM.Strong tracking filtering of nonlinear timevarying stochastic systems with coloured noise:application to parameter estimation and empirical robustness analysis.Int J Control1996;65(2):295–307.
30.Barata JCA,Hussein MS.The Moore-Penrose pseudoinverse:a tutorial review of the theory.Braz J Phys2012;42:146–65.
31.Schaub H,Junkins JL.Stereographic orientation parameters for attitude dynamics:a generaliza tion of the rodrigues parameters.J Astronaut Sci1995;44(1):13–5.
32.Tang XJ,Liu ZB,Zhang JS.Square-root quaternion cubature Kalman filtering for spacecraft attitude estimation.Acta Astronaut2012;76:84–94.
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Extension of analytical indicial aerodynamics to generic trapezoidal wings in subsonic flow
- Time-varying linear control for tiltrotor aircraft
- Global aerodynamic design optimization based on data dimensionality reduction
- Mesh deformation on 3D complex configurations using multistep radial basis functions interpolation
- Stagnation temperature effect on the conical shock with application for air
- Transient simulation of a differential piston warm gas self-pressurization system for liquid attitude and divert propulsion system