内窥镜手术机器人的轻量化设计与分析*
2018-04-20张雪,张帆
张 雪,张 帆
(上海工程技术大学 机械工程学院,上海 201620)
0 引言
微创手术[1-2]和传统手术相比具有提高手术质量,降低医疗成本的特点,是外科手术发展的必然趋势。微创手术机器人已成为众多高校和科研机构的研究重点,其中美国和欧洲科研机构在微创手术机器人方面的研究处于领先水平[3]。最具有代表性的是1996年美国Computer Motion公司研发的Zeus机器人系统[4-5]和1999年美国 Intuitive Surgical 公司的 Da Vinci 机器人系统[6-7]。美国Intuitive Surgical公司研发的Da Vinci微创手术机器人系统在2001年顺利地通过了美国联邦食品及药物管理局认证[8-9],并实现了微创手术机器人系统的商业化。国内由北京航空航天大学、清华大学和解放军海军总医院合作开发的机器人辅助无框架脑外科立体定向手术系统,开创了国内自主开发外科手术机器人的先河,并相继开展一系列的神经外科手术机器人系统研究[9-10]。哈尔滨工业大学机器人研究所研制了腹腔镜微创手术机器人系统。该系统可替代手术助手扶持、移动腹腔镜,为医生提供稳定的手术区域图像,并可以按照预先规划的轨迹夹持腹腔镜运动到患者体表切口处,以一定姿态插入患者体内,按照手术医生命令实时调整腹腔镜姿态,为医生输出理想手术视野,但控制系统的实时性不高[10-12]。
现在的主流微创手术机器人机构庞大不方便携带,这使得微创手术只能在一个固定的手术室进行,不能应用于野外以及某些特殊的场合;同时高昂的采购费用也给好多的医院带来了限制。现阶段主要通过普通微创手术来缓解上述所存在的问题,然而在普通微创手术中需要通过人工来扶持内窥镜,在较长时间的手术中,扶持内窥镜的医生极易出现手部抖动和体力不支现象。为了解决普通微创手术中人工扶持内窥镜存在的弊端,现设计一种轻量化的扶持内窥镜的微创手术机器人,所设计的机构将控制末端移动自由度的马达置于机器人机架,显著降低了机器人末端的运动惯量,有效提高机器人运动灵活性和精确性达到轻量化的目的;同时机构全部采用转动副驱动,避免了滚珠丝杆等转动—移动的运动传递方式,提高了运动效率和传动精度。
1 机器人结构设计
1.1 原理性分析
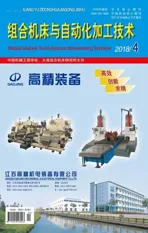
根据微创手术的临床需求,医生在扶持内窥过程中仅需实现俯仰、横滚和移动三个自由度,同时需要实现定点远心的运动。为了设计一款轻量化的便于携带的扶持内窥镜的微创手术机器人,现设计一个具有三自由度的内窥镜手术机器人,其原理如图1所示。其中坐标系xyz-o为惯性坐标系。

图1 内窥镜手术机器人运动原理简图
如图1中左图所示,内窥镜手术机器人包括两个旋转自由度,其中绕x轴旋转θ1实现执行臂的横滚运动;绕y轴旋转θ2实现执行臂的俯仰运动,此处实现俯仰运动的部分为双四边形结构,此结构能够保证所夹持的内窥镜过远心定点。如图1中的右图所示,内窥镜通过病人腹腔上的穿刺孔进入腹腔,d为内窥镜沿z轴方向上探入腹腔的长度。
1.2 结构的轻量化设计
以往的微创手术机器人末端执行杆件的上下移动,通常在末端安装一个电机通过丝杠传动来实现。通过电机轴直接输出旋转运动可达到设计的需求,但此方法使得结构过于庞大和笨重,达不到预期的效果。为了保证扶持机械臂的稳定性,降低末端的运动惯性,实现整个机构的轻量化,就要在最大程度上降低末端部分的重量。基于轻量化的设计理念,本设计利用曲柄滑块机构能够将旋转运动转化成直线运动的特性,将控制移动的电机实现了后置。通过综合分析三个自由度的实现方式,为了使整个机构紧凑、轻量化,方便携带和安装,将控制三个自由度的电机均置于机箱内,如图2所示。

图2 控制电机的安装方式
置于机箱内的电机其输出方向需要通过锥齿轮进行转换实现其所需输出方向,横滚运动由1号电机控制,当1号电机工作时将运动传递到与其相啮合的锥齿轮上,带动主轴的转动;俯仰运动由2号电机经过3个锥齿轮通过输出轴1输出,其中在轴上的锥齿轮起过桥作用;3号电机主要用来驱动曲柄滑块机构,控制内窥镜的移动自由度,运动的输出原理和俯仰运用一样,通过轴2输出,位于主轴上的锥齿轮同样起过桥作用。整个机械臂能够扶持内窥镜在腹腔内实现定点远心的俯仰、横滚和移动三个自由度,满足内窥镜临床操作的实际需求,其整体原理结构如图3所示。综合所设计的结构,机械臂的重量主要集中于箱体处,末端主要承受内窥镜本身的重量,在一定程度上实现了末端的轻量化。
(a)定点远心结构 (b)移动自由度结构 (c) 结构总成图3 结构设计原理图
2 主动定位臂运动学分析
内窥镜手术机器人包括两转动一移动三个自由度,其特性还在于能够过定点运动。运动学模型可以简化为一条线段绕线段上一点旋转和沿轴线方向上滑动,如图4所示。横滚角度为θ1,俯仰角度为θ2,移动距离为d,运动学模型如图4所示。

图4 主动定位臂运动学模型
2.1正运动学求解
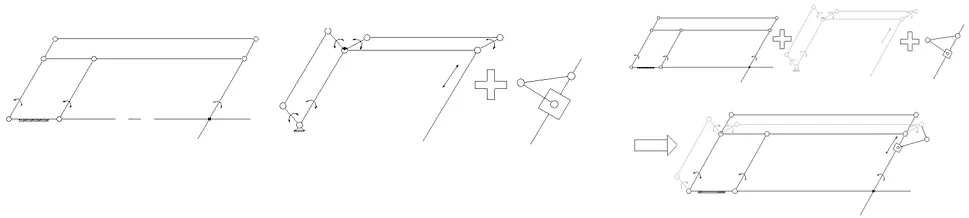
如图5所示,利用几何关系求解得到末端执行机构的位移量,位移量为:
d=ob=oc+cb=rcosθ3+lcosβ
(1)
整理可得运动方程:
(2)
其中,λ=r/l,ωt=θ3
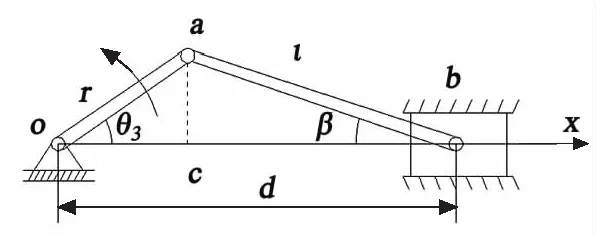
图5 移动自由度实现方式原理图
则主动定位臂的运动学方程为:
x=d×sin(θ2)
(3)
y=d×sinθ1×cos(θ2)
(4)
z=d×cosθ1×cos(θ2)
(5)
在设计中,有:
-85°≤θ1≤-15°-60°≤θ2≤+60°0≤d≤180
在上述的关节范围内,由式(3)~式(5),采用蒙特卡罗法[13],得到了末端机械臂相对于惯性坐标系的三维工作空间,如图6a所示。图6b为三维空间在xoy平面上的投影,图6c为xoz平面上的投影,从投影图中可以得出其工作空间在此两个投影平面上为对称的,图6d为yoz平面上的投影,为一个“扇形”,与普通微创手术中手持内窥镜的操作范围相符合,能够满足临床微创手术的需求。

图6 机器人工作空间及其投影
2.2 逆运动学求解
逆解是根据机器人末端操作器的位姿反求机器人各关节的关节角。根据正解结果,由式(3)~式(5)得:
θ1=arctan(y/z)
(6)
(7)
关于θ3的求解,根据几何关系余弦定理,由图5所示可得:
(8)
从逆运动学求解的结果可以得出,当机械臂驱动内窥镜沿轴线移动时与俯仰和横滚运动无关联性,这样便于控制和操作。
3 虚拟样机仿真
通过运动学仿真模拟机械臂主动关节的实际驱动情况,得出其相关重要参数的运动曲线,根据运动曲线分析所建立模型的可行性。
3.1 俯仰运动仿真
腹腔手术中内窥镜相对预先设定位姿后主要作俯仰运动,其运动特性对医生的操作视野范围有着重要的影响。为了验证所设计机构在俯仰运动方向上能够满足医生操作视野的需求,现将夹持内窥的机械臂调整到调整到预设角度-60°的最小极限位置进行仿真,整个仿真过程的时间设为12s,期望其能够准确的运动到+60°最大极限位置处,为一个运动周期。机械臂始末姿态的变化如图7所示。
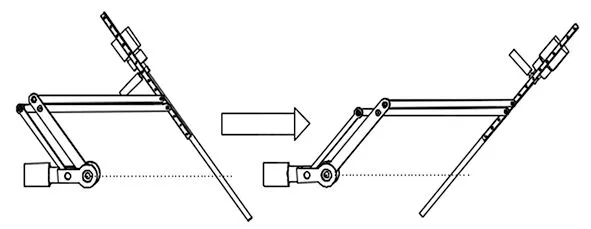
图7 俯仰运动机械臂始末状态
能否实现过定点运动是衡量所设计机构的一个重要性能指标,机械臂过定点能够保证其末端在所设定安全空间内运动,为医生提供开放的视野,提高手术的质量。远心点到电机驱动点的距离在运动过程中的仿真变化曲线的结果显示,远心点到基座的距离为一个定值,距离始终为500mm,仿真结果表明了所设计的机构能够实现定点远心运动。定点远心运动的实现主要通过双四边形结构,末端所夹持的内窥与四边形边在运动过程中能够实现等速反向协调运行,如图8仿真结果所示。上述的两项仿真结果均表明了所设计机构在附加曲柄结构的情况下能够实现定点远心运动,保证手术的安全性。
仿真结果还显示了主动定位臂在运动过程中的角速度的变化,速度经过了缓慢加速与缓慢减速的两个过程,从仿真的曲线可以看出速度在变化过程中过渡平缓,确保医生有一个安全的手术环境。
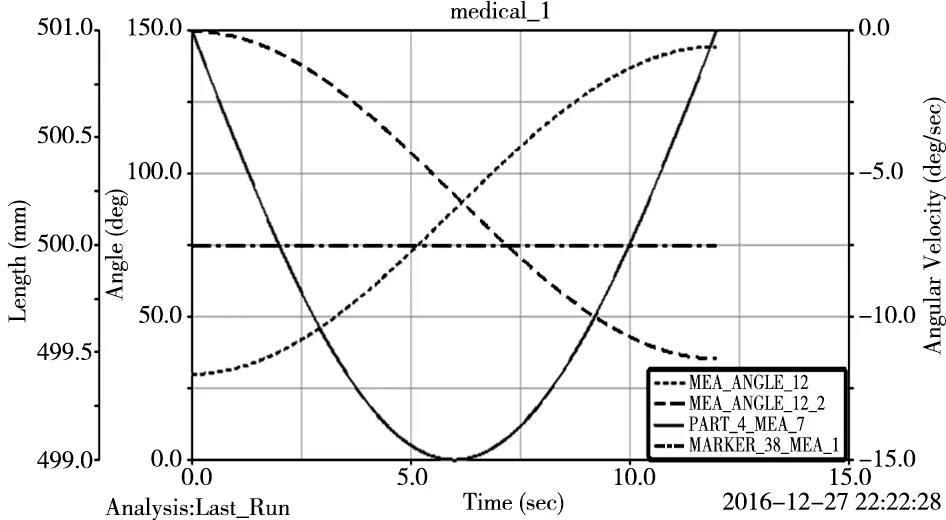
图8 俯仰运动仿真结果
3.2 移动自由度运动学仿真
曲柄滑块机构控制内窥镜探入腹腔的深度,从仿正的结果图像可以看出,当曲柄与平面的的夹角为60°时,内窥插入腹腔的深度为0,当角度转过90°达到150°时内窥镜达到了所能插入的最深距离为180mm,在安全范围内。
内窥镜探入腹腔的速度对整个手术环境的安全性和综合质量有着重要的影响,当速度过慢时将在无形中增加整个手术的时间,太快将带来一些未知的危险。从图9仿真结果可以看出内窥镜探入腹腔的速度的变化,在插入过程中经历了由低速到高速,从高速到低速的变化,在插入初期,需要速度逐渐增大,减少手术时间,在探入一定的深度后为了安全考虑,逐渐降低其运行速度。
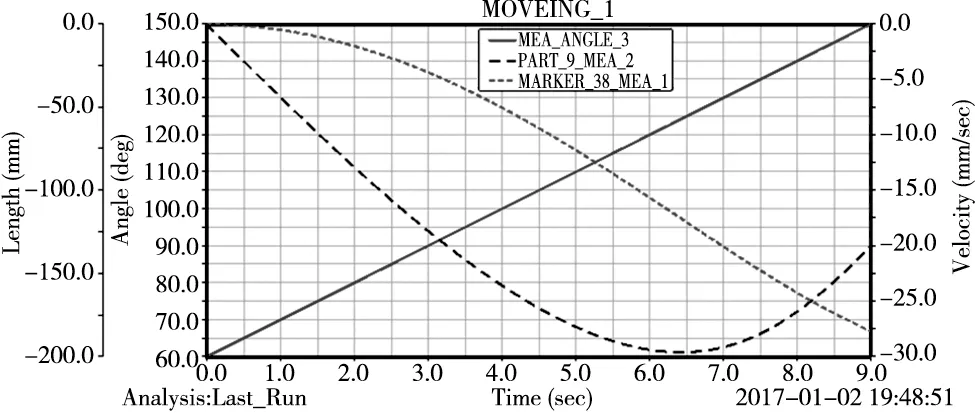
图9 移动自由度仿真结果
4 结论
本文通过临床需求分析,经过原理论证,设计一种扶持内窥镜的轻量化机械臂。求解了正逆运动学,绘制了三维运动空间,验证了设计的机械臂能够满足工作要求;运动学仿正对其安全性进行了研究,最终确保了所设计机械臂能够满足临床医生的使用,给手术医生提供一个稳定、安全的手术环境。
[参考文献]
[1] Kuo C, Dai j S. Robotics for minimally invasive surgery:a historical review from the perspective of kinematics[C]//International Symposium on History of Machines and Mechanisms,Berlin: Springer, 2009:377-354.
[2] Satava RM. Surgical Robotics: The Early chronicles-A Personal Historical Perspective. In Surgical Laparoscopy,In:Endoscopy& Percercutaneous Techniques, Lipincott & Will
ikins, Inc, Philadelphia, 2002,12: 6-16.
[3] 马如奇. 微创外科手术机器人执行系统研制及其控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
[4] 张伟.达芬奇机器人手术系统:原理、系统组成及应用[J].中国医疗器械信息,2015(3):24-25.
[5] 张政,谢叻.体内微型手术机器人运动仿真[J].中国数字医学,2015(1):57-60.
[6] 刘忠铭,李佑,龚建平.达芬奇手术机器人在肝胆外科中的应用[J].腹腔镜外科杂志,2015,(7):556-560.
[7] 四川省医学科学院·四川省人民医院.引进省内首台达芬奇手术机器人系统顺利完成第一例手术[J].实用医院临床杂志,2015(1).
[8] 方陵生.机器人外科医生为人类做手术[J].世界科学,2016(9):29-33.
[9] 李波,王粮山,刘长城,等.全机器人腔镜下冠状动脉旁路移植术临床疗效荟萃分析[J].中华医学杂志,2016,96(36),2923-2928.
[10] 夏宇,王共先.机器人手术在泌尿外科中的应用进展[J].手术,2016,1(3)37-45.
[11] 孟保文,曲岳,陈臻.达芬奇手术机器人故障维修6例[J].医疗卫生装备,2014(3):154-159.
[12] 江起庭,杨丽娜,江志伟.手术机器人的认识、应用及展望[J].实用手外科杂志,2013,27(1):12-13.
[13] 李保丰,孙汉旭,贾庆轩,等. 基于蒙特卡洛法的空间机器人工作空间计算[J]. 航天器工程,20(4):79-85.