超声波电机定子质点幅频特性研究*
2018-04-20苏国兵韩建超齐鑫哲
苏国兵,蔡 毅,韩建超,齐鑫哲
(1.中国空间技术研究院,北京 100039;2.北华航天工业学院 机电工程学院,河北 廊坊 065000)
0 引言
超声波电机是一种新型微特电机,与传统电磁电机相比,具有结构简单、低速大转矩、能量密度大等特点,在航空航天、精密仪器、医疗器械等领域有很好的应用前景。运行机理为在压电陶瓷片上施加两相相位差为90°的同频等幅交变电压,通过压电陶瓷的逆压电效应在定子中激发出两相幅值相等、在时间和空间相位差为90°的驻波,两相驻波叠加形成定子体中沿一定方向传播的行波,这时,定子行波表面质点的切向速度使得转子转动,且转子的转动方向与行波的传动方向相反。定子在压电陶瓷逆压电效应下的起振特性对定子弹性体内驻波的产生具有重要影响,进而影响转子的转动,定子表面质点幅频特性对超声波电机定子结构设计具有重要的指导意义[1-3]。
1 机理研究
超声波电机定子振动时表面质点空间运动、位移及速度在柱坐标系3个方向上均有分量,如果把沿轴向和周向的位移分量合成,可形成质点的椭圆运动轨迹。椭圆运动是实现定子从微幅振动到转子旋转运动的有效运动,定子表面质点振动时的幅值是形成椭圆运动轨迹的关键因素,定子表面质点的振动频率和幅度直接决定转子转速的大小,对定子表面质点的幅频特性进行研究很有必要[4-5]。定子是有腹板支撑的中空结构,腹板一般很薄、质量很小;因此,对超声波电机定子进行振动学分析时一般忽略腹板的影响,并把定子展开为等直梁,以此分析定子表面质点椭圆运动的产生机理。定子弹性体弯曲变形如图1所示。
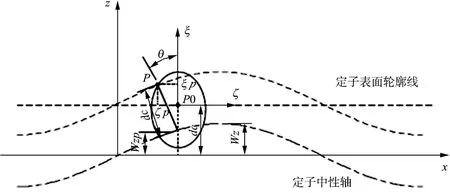
图1 定子质点运动分析
其中,定子平均半径为Rm,定子振动波数为n,行波长为λ,弯曲振动的垂向振幅为W0,角频率为ω,则得到在直梁中向右传播的弯曲行波方程:
w=W0sin(kx-ωt)
(1)
式中,k=2π/λ,在弹性体表面上任一点P,它距中性层的距离为dc,在梁未弯曲时的位置设为P0,当行波产生时,在t时刻P点所在横截面处梁弯曲变形的弯曲角为θ,则从P0到P的垂直方向的位移量ζp为:
(2)
弯曲振动的振幅W0远比弯曲振动的波长λ小,弯曲角θ也很小,所以上述位移可近似表达为:
ξp≈W0sin(kx-ωt)
(3)
定子表面质点的纵向速度νs为:
νs=-W0dckωsin(kx-ωt)
(4)
式中负号表示定子表面质点的运动方向与行波传播方向相反。比较式(4)和式(1)可得:
νs=-dckωw(x,t)
(5)
即定子表面质点椭圆运动时,其任意时刻的切向速度与该时刻该点的垂直位移成正比、与该点距离中性层的距离dc成反比、与振动频率成正比、与波长成反比[6]。当超声波电机定子结构参数确定后,对定子进行振动学分析应综合振动频率和振幅两方面因素。
2 定子振动学分析
超声波电机定子是由金属弹性体和压电陶瓷黏结而成的复合压电定子环,是具有力场和电场耦合作用的动力学系统,对这样的机电耦合系统进行分析采用能量法最合适,可将力学和电学量纳入到统一的框架中。将压电陶瓷在电学信号激励下诱发定子机械变形的激振效果等效成单自由度弹簧这一质量系统在外力作用下的强迫振动,从而建立基于压电陶瓷诱发应变激振的压电振子动力学模型[7]。
2.1 结构参数
超声波电机定子由弹性体和压电陶瓷片黏结而成,弹性体采用锡青铜材料,该材料耐磨、导热性好、热膨胀系数小、质量轻并且具有较好的工艺性;压电陶瓷片采用PZT-4,PZT基压电陶瓷,压电性能好、使用温度范围宽、抗疲劳强度高并且铁电性优良。压电陶瓷片在表面上附着电极,在厚度方向极化,压电陶瓷表面形成等势面。定子弹性体结构如图2所示。

图2 定子弹性体截面图
设计原则:
(1)内外直径:超声波电机定子外径尺寸的确定要综合考虑极限转速、输出扭矩以及输出功率之间的关系。超声波电机定子外径的平方与极限转速成反比,与输出扭矩和输出功率成正比。定子的内径尺寸要适中,如果定子的内径过小,会使更多的能量传递到定子的内支撑板上消耗,若内径过大,定子基体环比较窄,压电陶瓷环的宽度就比较小,超声波电机的输出功率就较小,同时定子的固定也会越困难[8]。
(2)基体厚度:定子基体厚度直接影响定子模态频率和振动幅值的大小。基体的厚度越大,定子的刚度增加,相同阶次的模态频率增高,工作频率也越高,但在相同的激励条件下振幅会变小,基体不宜过厚[9]。
(3)定子齿:超声波电机定子齿数和齿宽相互关联,齿数又取决于定子工作模态节径数,一般定子齿数是定子工作模态节径数的倍数。在一定范围内增高定子齿可放大定子表面质点的轴向振幅,从而提高转速,但是齿太高,定转子接触区域内定子表面质点沿周向速度变化更大,会降低超声波电机的输出效率,并且定子齿太高,定子振动的非线性特性会增强,超声波电机容易出现堵死现象[10]。根据以上设计原则结合工程实际,定子弹性体和压电陶瓷片尺寸参数分别如表1、表2所示,定子材料参数如表3所示。

表1 定子弹性体结构参数

表2 压电陶瓷片结构参数

表3 定子材料参数
超声波电机定子通过螺钉固定在底座上,因此定子弹性体内圈固定,外圈自由。压电陶瓷片与弹性体黏结在一起,不考虑两种材料黏结层的影响,将压电陶瓷片和定子弹性体通过单元节点直接联接。
2.2 有限元模型
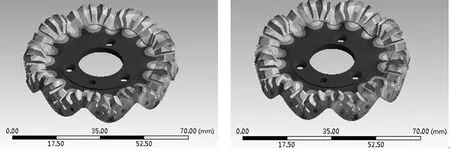
对超声波电机定子建立有限元模型,弹性体和压电陶瓷片采用三角形或四边形单元进行网格划分,控制单元的划分大小,使单元在定子齿处划分更为细腻,共21919个节点、11594个单元,如图3所示。

(a)顶面 (b)底面图3 定子有限元模型
2.3 结果与分析
2.3.1 模态分析
超声波电机要求定子表面质点振动位移轨迹呈椭圆时才具有连续的定向驱动作用。由波的叠加原理可知:椭圆运动的实现要求定子能利用压电陶瓷分别激发出弹性体的一阶面内伸缩L1振动模态和二阶面内弯曲L2振动模态,两者叠加形成具有定向致动作用的复合振型[11]。对定子前40阶模态进行有限元求解,得到定子模态与频率、振幅间关系,如图4~图6所示。
(a)B09共振频率为32941 Hz振型 (b)B09共振频率为32965 Hz振型图4 B09两个模态的振动频率

图5 定子阶数与频率关系 图6 定子频率与Z向变形量关系
由图4~图6可得,超声波电机定子B09模态振型形态好,能作为超声波电机驱动元件,被激励出较好的振型,有效驱动转子转动,模态频率分别为32941 Hz和32965 Hz,频率适中,B09模态前一阶和后一阶模态频率与B09模态频率差值均大于2 kHz,从而定子在B09模态频率下工作时,几乎不出现模态混叠现象。超声波电机定子在0~40阶存在带节圆的弯曲振动模态、不带节圆的弯曲振动模态、面内振动模态等,每阶频率对应一个振型。定子模态随阶数的增加,固有频率逐渐增大,定子表面质点Z向变形量随频率增大无较好线性变化规律;通过观察各阶定子的振动形态,可确定无节圆的B0n振型。在20~40 kHz频率范围内存在B07、B08、B09的弯曲振动模态,定子表面分别有7、8、9个弯曲波。从两相对称以及提高定子可激发区域的角度考虑,超声波电机一般选用奇数模态。B07模态的振动频率为21350 Hz和21353 Hz,频率偏低;故选择B09模态作为超声波电机的工作模态较为合适,其振动环中无节圆,模态很纯,两个简并模态频率基本一致,定子结构设计合理。
2.3.2 谐响应分析
超声波电机定子设计时不仅要考虑模态振型的优劣,还要考虑驱动信号对定子表面质点振幅的影响,故对定子机电耦合模型进行谐响应分析很有必要[12]。通过谐响应分析可以确定定子在承受随时间正(余)弦变化的激励电压时的稳态响应,还可以得出定子弹性体在设计工作频率激励下的幅频特性,并判断定子激振振型的好坏。通过对定子模态分析,定子振动模态选取B09时工作特性较好,因此选取B09振动模态进行谐响应分析,如图7~图10所示。
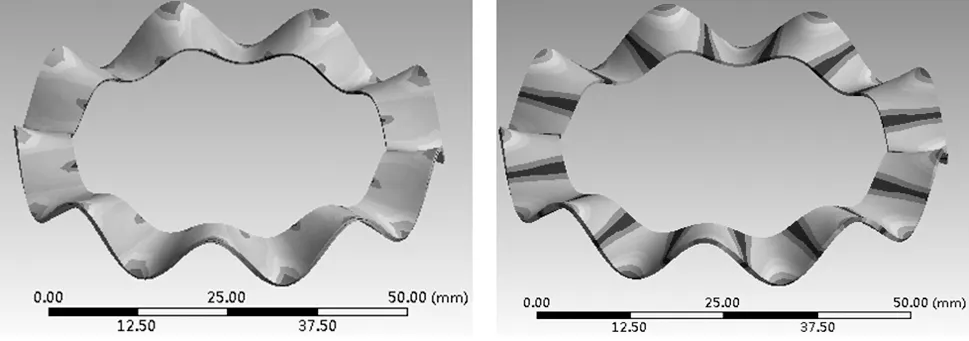
(a)应变云图 (b)总变形云图图7 压电陶瓷200 V电压下诱发激振效果

(a)32986Hz变形 (b)33026Hz变形
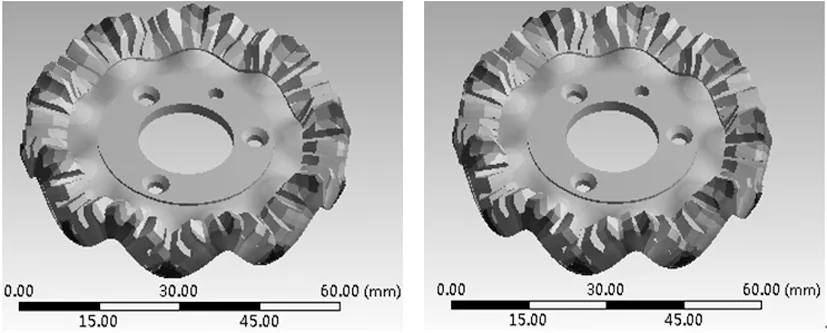
(c)32986Hz下z向响应 (d)33026Hz下z向响应图8 定子压电陶瓷激励下位移响应
考虑压电陶瓷逆压电效应的影响,定义压电陶瓷片黏结面的面上电压为0 V;下表面根据B09分区,每个分区施加峰峰等值电压200 V,相邻分区电压方向相反。压电陶瓷片在电学信号激励下的应力与应变规律如图7所示。在电信号激励下,压电陶瓷片发生变形,其变形效果和定子工作模态振型一致,可作为定子弹性体的激励元件,有效激发定子弹性体B09振型。压电陶瓷片与定子弹性体黏结在一起,对定子弹性体施加B09共振频率下的激励,其位移响应如图8所示,可见定子弹性体对于压电陶瓷激振振幅具有一定的放大效果,可有效激发出定子弹性体内的驻波。由图9、图10可见,定子表面质点最大振幅约为0.14μm,最大振幅对应的频率为32986 Hz,振动速度为1.2mm/s,定子可作为超声波电机驱动部件,有效驱动转子转动。
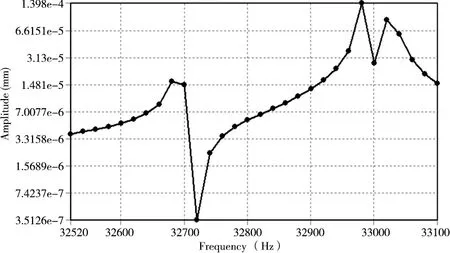
图9 定子压电陶瓷激励下幅频特性

图10 定子压电陶瓷激励下振动速度
3 实验验证
为验证仿真结论的正确性,采用PSV-300F-B多普勒激光测振系统对定子进行模态实验。该系统不仅具有测试频段宽(0~100 kHz)、精度高(位移可测到nm级)和非接触等优点,而且可通过编程实现多点快速测量,得到定子表面各个测量点的振动幅值[13]。超声波电机定子实际工作模态频率约为33200 Hz,峰峰电压值为200 V时,定频扫描(约33200 Hz),定子表面质点响应幅值约为0.11μm。根据实验数据绘制幅频特性曲线如图11所示。

图11 实验实测幅频特性曲线

表4 超声波电机定子模态实验与仿真结果
实验结论与仿真结果均为压电陶瓷施加200V电压激励下的谐响应结果,如表4所示。仿真结果与实验结论对比分析,超声波电机定子理论工作频率与实际工作频率相差较小;由于工作时定转子间预压力的限制以及能量转化损失等原因,理论工作频率时对应的振幅比实际工作频率时的振幅大。
4 结束语
本文以超声波电机能量转换部件定子为研究对象,完成了定子弹性体结构设计,并建立定子机电耦合模型,运用有限元法分析了定子表面质点的幅频特性,对超声波电机工作频率进行了优选,通过设计定子模态实验验证了仿真结果的正确性,对超声波电机关键部件定子设计具有重要的指导意义。
(1)超声波电机定子表面质点椭圆运动是驱动转子旋转的有效运动,质点振动频率和幅值是决定转子转速大小的关键因素。
(2)超声波电机定子选取B09模态作为工作模态较为合适,频率适中,振幅较大,振型较好。
(3)有限元分析结果与实验结论对比发现:超声波电机定子实际工作频率比理论工作频率大230 Hz左右,误差大约是0.7%,两者基本吻合;实际工作频率对应的振动幅值比理论工作频率对应的的振动幅值小0.03μm,误差大约为21%,有一定差距。
[参考文献]
[1] 李霞,张宁,高琳,等. 超声谐波电动机的设计与分析[J]. 微特电机,2015,43(5):9-13.
[2] 苏民伟,罗敏峰,郑伟.超声电机位移分辨率特性研究[J].组合机床与自动化加工技术,2016(2):9-12.
[3] 陈超,任金华,石明友. 旋转行波超声电机的冲击动力学模拟及实验[J]. 振动、测试与诊断,2014,34(1):8-14.
[4] Bekiroglu E. Ultrasonic motors: their models, drives, controls and applications[J]. Journal of Electroceramics, 2008, 20(3/4):277-286.
[5] 徐从裕,孙雅琼,方文琼,等. 超声电机微纳驱动参数调节机构设计[J]. 中国机械工程, 2013,24(7):886-889.
[6] 周景亮,陈超,王均山,等. 旋转型行波超声电机瞬态响应能力的试验研究[J]. 中国机械工程,2014,25(10):1369-1380.
[7] 王涛,纪跃波. 双定子旋转型超声电机径向滑移现象的仿真分析[J]. 四川大学学报,2015,52(5):1057-1062.
[8] Radi B, Hami A E. The study of the dynamic contact in ultrasonic motor[J]. Appl Math Modell, 2010,34(12):3767.
[9] 纪跃波,伍旺贤. 一种减少行波型旋转超声电机径向滑移的方法[J]. 山东大学学报,2016, 46(3):112-116.
[10] 王光庆,沈润杰,郭吉丰. 压电陶瓷对超声波电动机定子特性的影响[J]. 机械工程学报,2010,46(4):8-14,21.
[11] 芦小龙,赵淳生. 超声电机定子热机电耦合特性[J]. 振动工程学报,2011,24(5):522-528.
[12] 陈超,曾劲松,朱华,等. 微型行波超声电机定子的参数优化设计[J]. 中国机械工程,2009,20(5):568-572.
[13] 周盛强,赵淳生. 超声电机定子振动分析的模态选择[J]. 光学精密工程,2009,17(12):3009-3015.