GPS/BDS/INS tightly coupled integration accuracy improvement using an improved adaptive interacting multiple model with classified measurement update
2018-04-19HouzengHANJianWANGMingyiDU
Houzeng HAN,Jian WANG,*,Mingyi DU
aKey Laboratory for Urban Geomatics of National Administration of Surveying,Mapping and Geoinformation,Beijing 100044,China
bSchool of Geomatics and Urban Spatial Informatics,Beijing University of Civil Engineering and Architecture,Beijing 100044,China
1.Introduction
During the past two decades,the positioning and navigation technologies have been extensively researched and applied to many applications,such as vehicle navigation,personal positioning,and mobile surveying.The rapid development of the market for Location Based Service(LBS)has made the positioning and navigation technologies more important and attractive.1Traditionally,the Global Positioning System(GPS)has been an important tool for navigation in the open sky environment.However,GPS can only provide reliable solutions when the number of the visible satellites is larger than four and the measurement noise is not significant.This can be a major drawback when GPS operates alone.2
The satellite based navigation has experienced dramatic changes with the rapid development of multi-Global Navigation Satellite System(GNSS).3The fusion of multi-GNSS can bring significant improvement on satellite visibility,accuracy and reliability.In particular,the Chinese BeiDou Navigation Satellite System (BDS), which was established independently in China,has begun to provide positioning service in the Asia-Pacific region in December 2012,and is pacing steadily forward towards its global coverage.4BDS based Real Time Kinematic(RTK)positioning,5Precise Point Positioning(PPP)6and Precise Orbit Determination(POD)7have been investigated recently.
When the solution availability and update rate are stringent requirements,the GNSS alone may not provide satisfactory results in constrained environments,such as urban canyons and open pits.For the modern navigation technologies,two or more systems are usually integrated together to improve the navigation performance,among which the Inertial Navigation System(INS)has become one fundamental adding system.The integration of GNSS and INS has been widely deployed due to their complementary characteristics.8,9Especially when the low-cost inertial sensors are available in the market,the GNSS/INS integration becomes more attractive due to the fact that it can provide superior performance compared to GNSS or INS standard-alone system.
Conventionally,the Extended Kalman Filter(EKF)algorithm is commonly applied to fuse the outputs from GNSS and INS,namely position and velocity estimates in Loosely Coupled(LC)mode or pseudorange,Doppler and carrier phase observations in Tightly Coupled(TC)mode.8However,the EKF requires that the dynamic model noise covariance and measurement model noise covariance are known exactly in a priori.10Inaccurate knowledge on the statistical properties to both dynamic noise and measurement noise will result in degraded performance or even cause divergence problem.However,in real environments,using a pre-specific constant noise for such applications is not suitable.Various adaptive Kalman filtering strategies have been proposed to overcome the problem of uncertainty in noise statistics for both dynamic and measurement models.The Innovation-based Adaptive Estimation(IAE)method has been widely used for adjusting covariance matrix on line.11In addition,the residual sequences can also be used to adapt the stochastic properties of the filter on line.12The adaptive filtering with fading memory algorithm has been developed to improve the estimation accuracy.13To improve the robust and adaptive capability of the filter,optimal adaptive factors are derived to improve the filtering results.14
Another major adaptive estimation strategy is multiple model adaptive estimation.Asa probability switching approach,the Interacting Multiple Model(IMM)algorithm has the structure for dynamically selecting a large set offilters,which actually performs well in many cases.The IMM algorithm has originated from tracking applications,15and now been extended to multi-sensor fusion applications.16,17Simulation results have proved its good performance.However,real tests were seldom carried out to validate its effectiveness.In this work,an improved Adaptive IMM(AIMM)algorithm is developed and tested with real data.
The remainder of this paper is organized as follows.The tightly coupled integration strategy for GPS/BDS/INS is brie fly introduced first.Then the proposed sensor fusion algorithm is provided,and the field test used to evaluate the performance of various integration strategies is described.Finally,conclusions are given.
2.Tightly coupled integration of GPS/BDS and INS
The complementary characteristics of GNSS and INS have made them well-suited to integration.In particular,INS obtains better short-term accuracy;however GNSS can provide navigation solution with long-term stability.In this research,the tightly coupled mode,which is believed to obtain advanced performance compared with loosely coupled mode,will be adopted by using an EKF.The mathematical details of integration system are examined.
2.1.Dynamic system model
The inertial sensors can measure the specific force and angular rates,and strapdown INS mechanization process then transforms the raw inertial outputs into navigation solutions.The navigation equations parameterized in the north-east-down navigation(n-)frame can be written as18

where rnand vnare position and velocity vector in the n-frame,respectively;fnand gnare the specific force and gravity vector in the n-frame,respectively;Ω represents the skew-symmetric form of the frame rotation vector;is the rotation matrix from the body frame to the navigation frame,the subscript i-,e-and b-represent inertial frame,earth frame and body frame,respectively.
For the practical applications,the inertial sensor outputs are contaminated by sensor errors.It is generally more important to consider the manners of error propagation.The perturbation of the inertial navigation equations to obtain error states can be described as follows19,20:

where δr,δv,δψ are the position,velocity and orientation error vectors,respectively; η and ε are the accelerometer error and gyro error vectors,respectively;δg is the gravity uncertainty error vector;ωieis earth rotation vector;ωenis the craft rate.
To construct the system model of the Kalman filter,a twenty-one state INS error model is adopted in this research,which includes nine navigation error states expressed in the n-frame(three for position,three for velocity and three for orientation).Three biases and three scale factors of accelerometer and three biases of gyroscope are parametrized as unknown parameters for the closed-loop architecture,and three lever arm errors are also added considering the inconsistence between the IMU and the GPS antenna.The detailed error states are given as follows:
The inertial sensor errors are modeled as first-order Gauss-Markov(GM)processes,while the lever arm errors are treated as random constants.For the low-cost inertial sensors,the inertial sensor errors will significantly degrade the navigation performance in short time unless integrated with other sensors,such as GNSS,to rectify the navigation solution.
2.2.Measurement model
In the TC integration mode,the difference between the GNSS raw observables and INS derived measurements is used as measurement vector of KF.The GNSS observables can be carrier phase,pseudorange and Doppler in single point positioning mode or differential mode.The carrier phase observables are used when high accuracy is required.In order to reduce the spatial dependent errors,such as tropospheric error and ionospheric error,a reference station is deployed to deliver differential corrections.In this research,the Double Differenced(DD)pseudorange observables and Single Differenced(SD)Doppler observables are used to validate the proposed algorithm.The GPS/BDS combined measurement model can be expressed by

where ▽ represents differencing between two satellites and Δ▽denotes the double differencing operation;andare GPS/BDS pseudorange and Doppler observables expressed in the earth(e-)frame,respectively;andare the pseudorange and Doppler observables derived from INS,respectively; ερand εDare GPS/BDS pseudorange and Doppler observation noise,respectively;Heis the geometry matrix;is the rotation matrix from n-frame to e-frame andis the rotation matrix from body(b-)frame to eframe;λGNSSis the GPS/BDS signal wavelength.
Due to the lever arm uncertainty,the offset between GNSS antenna and IMU physical center must be accounted for when the INS predictions are updated.The GNSS position in the e-frame can be converted from IMU position.

where Lbis the lever arm offset vector in the body frame.
Similarly,the IMU velocity must be transformed to the GNSS antenna.

As mentioned above,the translated position and velocity estimates are used to derive the INS predicted pseudorange and Doppler measurements in the TC architecture.In this research,the atmospheric delay can be neglected by differencing the observables considering the short baseline configuration,at the same time,and the satellite clock drift will be corrected from the broadcast ephemeris.When GPS and BDS are combined,the separate reference satellites must be chosen to form differencing because GPS and BDS currently transmit at different frequencies.
2.3.Sensor fusion with EKF
An EKF model is adopted in this research to combine the inertial and GNSS measurements.The EKF algorithm is suitable for addressing the problem of non-linearity of system model and measurement model,which have been linearized as demonstrated in the above sections.The solution of EKF is a recursive procedure which contains prediction step that is given by10


where Kkis the Kalman gain matrix;is the a posteriori state vector at epoch k;zkis the measurement residual vector and Hkis the measurement design matrix;Rkis the measurement noise covariance matrix.
Whenever the GNSS measurements are available,the predicted navigation states are updated and the estimated sensor errors are then utilized to compensate the raw inertial measurements.To increase the precision of Kalman filter and reduce computation effort,the U-D filtering is implemented in this research.
Normally,Kalman filter obtains a better solution given that process and measurement noise statistics are correct,which may form a major drawback when KF is used for practical applications.Incomplete knowledge of both process and measurement models may result in less accurate results or even divergence problem.
3.Adaptive IMM algorithm
In this research,an adaptive IMM filter is used to analyze the GNSS/INS integration data.Two separate dynamic models with different process noises are implemented simultaneously,and the measurement noise covariance is adapted recursively based on the residual information.The algorithm of AIMM filter is introduced to deal with process noise uncertainty and measurement noise uncertainty simultaneously.
3.1.Sensor fusion with EKF
The IMM estimator obtains the state estimates under different filters based on the model probabilities.One cycle of the IMM algorithm mainly contains three steps:Interaction(mixing), filtering and combination.21
3.1.1.Interaction
Given a discrete set of r models,which are denoted by M= {M1,M2,...Mr},the mixing probabilitycan be calculated as

with the normalizing factor given by

The initial conditions(state estimate and covariance)for each filter can be calculated by
3.1.2.Filtering
For each filter,the KF prediction and update step will be implemented,and the state mean and covariance are estimated correspondingly.In addition,the likelihood functions for each if lter can be calculated by

where m is the number of measurements at this epoch;is the innovation sequence andis the corresponding covariance,which are computed as follows:

The updated mode probability can be calculated as

where c is a normalizing factor,and is given by

3.1.3.Combination
The combined state estimates and covariance are computed according to the mixture equations
3.2.Adaptive Kalman filtering
For the GNSS/INS integrated navigation applications,the level of measurement noise is time-varying according to ambient environments.In order to improve the positioning performance,the statisticalinformation ofthemeasurement covariance matrix should be adapted on line.The Sage filtering algorithm can be used to adapt the measurement covariance given that the process noise is known.

where b is the forgetting factor in the range of0.95–0.99generally,and it is set as 0.97 in this research based on data analysis.The symbolekis denoted as the residual sequence,and is calculated by

For real applications,the abnormal errors in the observations should be eliminated first.
3.3.System integration architecture
In this research,the tightly coupled architecture is employed by combining GPS/BDS code and Doppler observations with INS predicted observations.Fig.1 shows the flowchart of the adopted AIMM algorithm.The specific force and angular rate outputs from the IMU are calibrated with the estimated sensor error states,and are then used to perform INS mechanization.To account for the statistic uncertainties of process noise,two models with different levels of process noise are used in the IMM configuration,which are upper and lower bounds of process noise covariance in the IMM.In each time step,the mixing probabilities are obtained during the interaction process,and the state estimates for each filter are calculated during the EKF time update step.

Fig.1 Flowchart of adaptive IMM algorithm with classified measurement update.

Table 1 IMU sensor specifications.
On the other hand,the GPS/BDS code and Doppler observations at base and rover stations are double differenced to reduce the atmospheric errors.In the measurement update step,the updating procedures are carried out using the measurements with the same type at each filtering step with U-D filter,namely,the code and Doppler measurements for GPS/BDS at different frequency bands are updated sequentially.This will bring great benefits for real-time applications when all four systems(GPS+BDS+GLONASS+Galieo)are fully deployed,because the computation complexity will be large if all the observations are updated in one filter structure,especially for the triple-frequency situation.
Once the GNSS observations and INS derived observations are obtained,each filter will conduct the prediction and update steps.The mode probability will be updated when the measurement update is completed,a weighted combination of updated states from the two-model IMM will be computed,and the final combined navigation solution is obtained according to the mixing equations.At the same time,the measurement noise covariance will be updated using the residual information.The estimated sensor error states are then fed back to compensate inertial raw outputs.
4.Field experiment and performance evaluation
4.1.Field experiment description
A field test was carried out in Xuzhou City,China on 19 September 2014 to validate the proposed algorithm.8The NovAtel SPAN-CPT system,whose sensor specifications are shown in Table 1,and one high-grade geodetic GNSS dualfrequency receiver were used to collect data.In our experiment,one base station was installed on the roof of the building of School of Environment Science and Spatial Informatics(SESSI)(Base),on the campus of China University of Mining and Technology(CUMT).The test baseline was less than 5 km,so that atmospheric delay between the rover and base station can be cancelled.During the test,a total of approximate 70 min data was collected for post-processing,the raw IMU data was recorded at the rate of 100 Hz,and GNSS measurements were collected at 1 Hz above an elevation mask angle of 10°.Fig.2 shows the ground trajectory for the test,and a period of signal loss occurred when the vehicle was driving under foliage.
In this research,only the single frequency pseudorange and Doppler measurements from GPS and BDS were used to evaluate the navigation performance.The reference solution was obtained by processing IMU measurements and differential GPS/BDS carrier phase measurements in TC mode,so that several-centimeter level positioning accuracy can be obtained,which is considered sufficient for the algorithm evaluation.

Fig.2 Ground track offield experiment.

Fig.3 Visible satellites and PDOP during test.
Fig.3 shows the PDOP variations and visible satellites for the dual-constellation configuration during the test.The number of average visible satellites for the GPS/BDS combined system exceeded 15,and the visibility conditions were obvious better compared with the GPS only case.The average PDOPs for the combined system can reach at the level of less than 1.5,which was evidently better than the individual system.The benefits of adding BDS observations are obvious when the vehicle was driving under semi-open or demanding urban canyon conditions.
4.2.Performance evaluation of proposed algorithm
As mentioned before,the primary objective of this research was to evaluate the navigation performance of AIMM filter when GPS/BDS is fused with low-cost INS,and the Conventional Extended Kalman filter(CEKF)and conventional IMM filter were demonstrated for comparison.The tightly coupled integration strategy was implemented to fuse pseudorange and Doppler measurements and INS derived measurements.For the short baseline configuration,most of atmospheric errors can be eliminated in the differential mode,but the receiver measurement noise and multipath error(MP)cannot be reduced.For the navigation applications,the level of measurement noise is environmentally dependent.For both GPS and BDS,a priori elevation dependent weighting scheme was applied,and the undifferenced measurement covariance at specific elevation(el)can be described as

where σ0is the standard deviation in the local zenith,which were taken as 0.3 m for pseudoranges and 0.01 m/s for Doppler observations;however a slightly higher value of 0.5 m was applied for BDS GEO satellites considering the higher multipath disturbance.In this research,adaptive algorithm was applied to estimate the measurement covariance on line.The U-D based KF will update the filter with pseudorange and Doppler observations sequentially.
It is usually difficult to set an accurate stochastic model for INS that performs well in all conditions,so that the demanding of accuracy improvement raised the need for an adaptive integration technique.In this research,a two-model IMM algorithm was applied,and two process noise covariance matrices were set as:Ql=4Q0and Qs=0.25Q0.The nominal covariance Q0was determined based on the sensor specifications.The two-model IMM was implemented considering the uncertainty of the pre-specified value,and the values are determined by experience based on probability theory.The Markov chain transition matrix between these models was given by

The final results are actually not sensitive to these values.In order to make the filter more stable in the initial stage,a slightly larger initial model probability for large process noise model was used.The initial model probabilities were chosen as 0.4 and 0.6,respectively,for small process noise model and large process noise model.
The positioning solutions are obtained using different GNSS integration configurations,namely,GPS/INS,BDS/INS and GPS/BDS/INS.Due to the lower precision of BDS observations compared to GPS,a priori weight of 1:2.5 on measurements for BDS and GPS was applied in the dualconstellation case.The positioning errors for different configurations are shown in Figs.4–6.As can be seen from thesefigures,decimeter-level positioning accuracy is achievable through the adaptive IMM filter for the GPS/INS configuration and GPS/BDS/INS configurations;however the positioning accuracy for BDS/INS is evidently worse,especially in the height direction.In general,the positioning performance using the adaptive IMM filter is improved in each configuration compared with the CEKF and IMM.The CEKF solutions contain more noise as a result of assigning inaccurate statistical properties to both dynamic model and measurement model.The environment dependent variations cannot be modeled with constant noise level.However,the navigation solution from the AIMM displayed a smoother trajectory,and some abrupt positioning errors occurred in CEKF have been eliminated.In addition,the conventional IMM obtains inferior navigation accuracy when the a priori measurement noise covariance is not accurate,especially for the height component.For the test data,the quality of BDS pseudorange observations is evidently worse than GPS,especially for GEO satellites,and thus the BDS/INS positioning performance is evidently degraded in comparison with GPS/INS.At time 459,700–460,200 s,the solution quickly diverged from a 2 m error to nearly a 6 m error.This can be explained by the existence of strong multipath effect,and thus the overweighed pseudorange was unable to reject the abnormal effects.When GPS and BDS are combined,the filter de-weighted the pseudorange observations as signal noise increased,and thus the positioning accuracy from GPS/BDS/INS hasaslight improvement for AIMM,compared to GPS/INS.
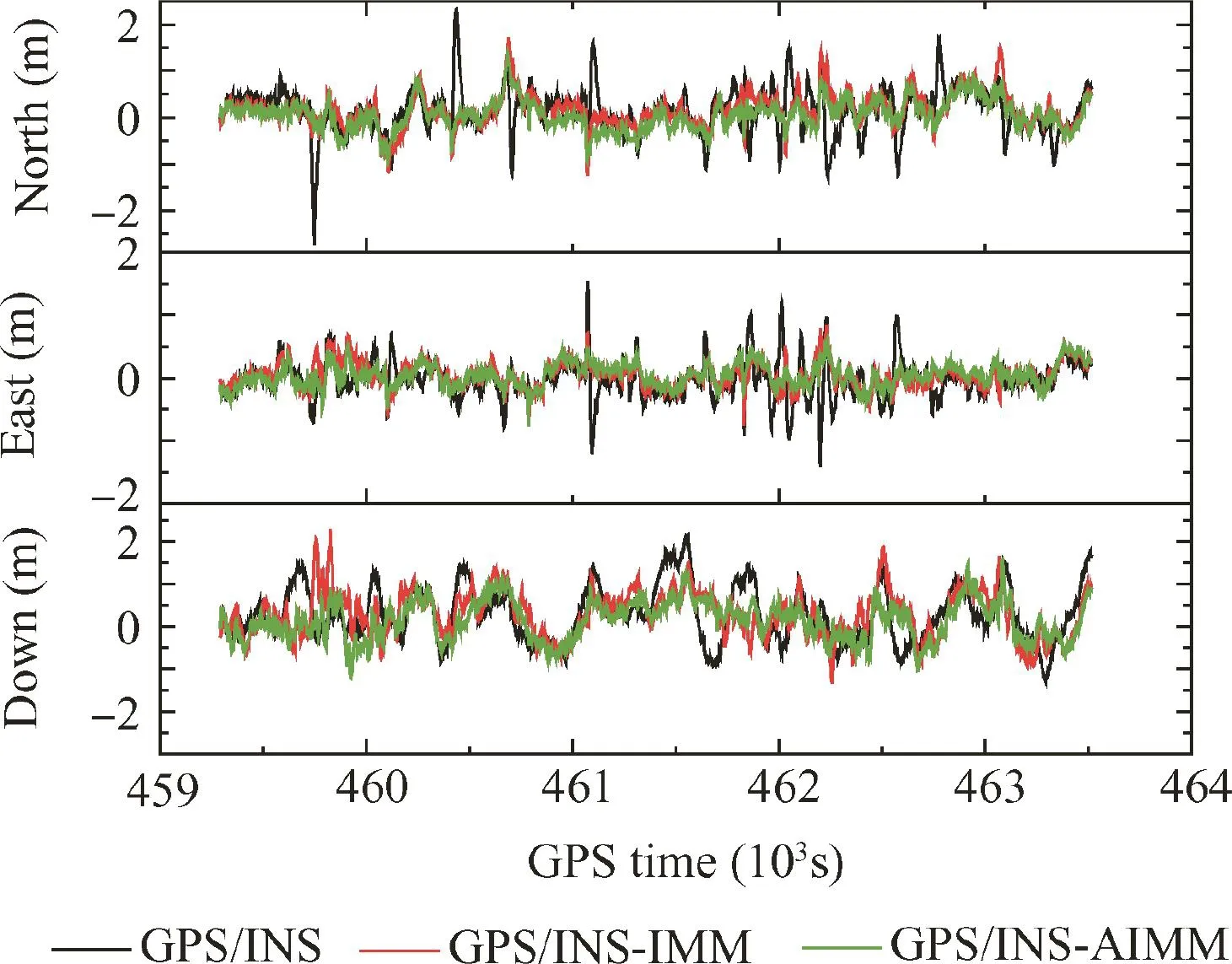
Fig.4 Position accuracy comparison among CEKF,IMM and AIMM with GPS/INS configuration.
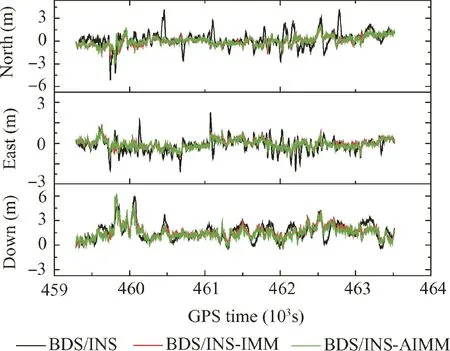
Fig.5 Position accuracy comparison among CEKF,IMM and AIMM with BDS/INS configuration.
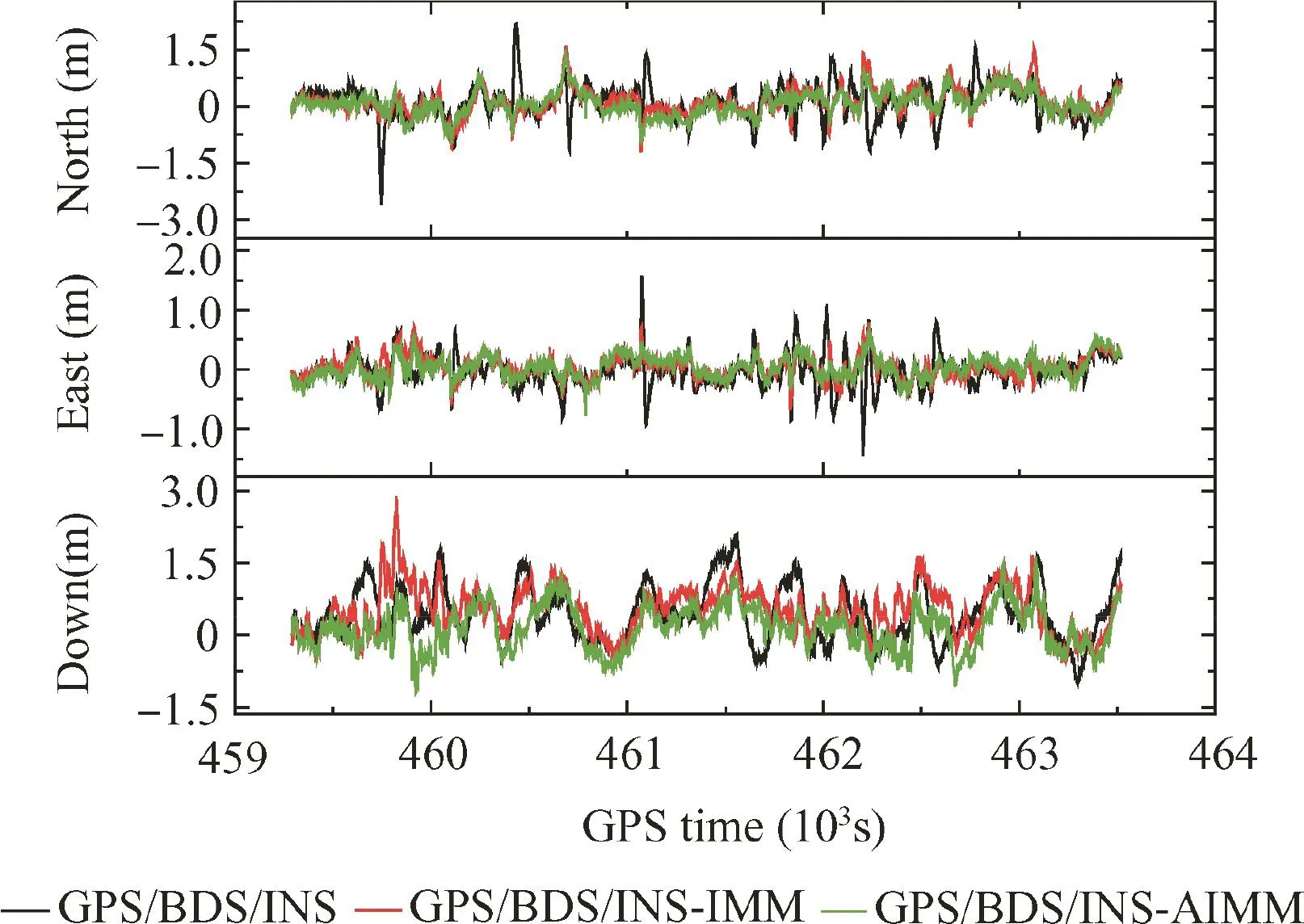
Fig.6 Position accuracy comparison among CEKF,IMM and AIMM with GPS/BDS/INS configuration.
Fig.7 summarizes the position RMS error for each solution.As shown in Fig.7,comparing the values of RMS of each solution,it can be seen that the AIMM achieves the best navigation performance,the positioning solutions are improved by 35.6%,37.3%and 31.5%for north,east and height components,respectively,when GPS/INS filter is applied,in comparison with CEKF solution.It is clear that the east component obtains the best performance due to the geometric configuration.Similarly,the AIMM solutions obtain improvements of 42.9%,36.7%and 12.7%,respectively,for BDS/INS.However,the BDS/INS solution is evidently worse than GPS/INS solution,especially for the height component.In addition,the GPS/BDS/INS solutions have been improved by 35.8%,34.3%and 33.9%in north,east and height directions,respectively,when AIMM is used.However,due to the lower precision of BDS pseudoranges,the GPS/BDS/INS solution has only a slight improvement compared to GPS/INS solution.It is believed that further improvements can be obtained if the precision of BDS observations is improved.The conventional IMM also performs better than CEKF;however,its accuracy is limited for insufficient knowledge of measurement noise.

Fig.7 Comparison of position RMS errors for different schemes.
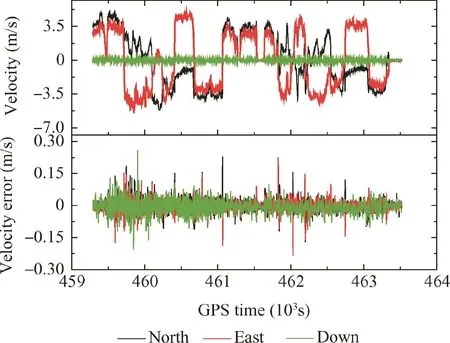
Fig.8 Velocity and corresponding velocity errors for GPS/BDS/INS using AIMM.
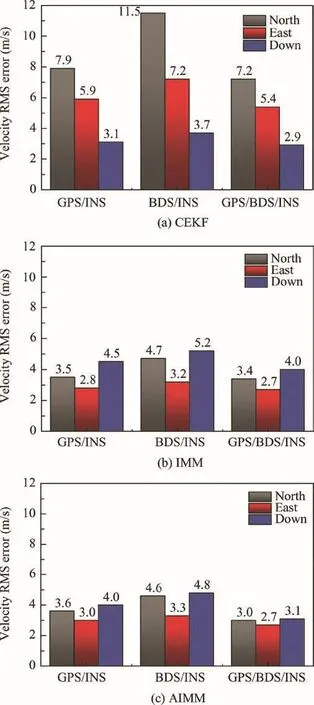
Fig.9 Comparison of velocity RMS errors for different schemes.
Fig.8 shows the velocity and corresponding velocity errors for GPS/BDS/INS by applying AIMM.The results show that centimeter/second level accuracy can be achieved in each direction using AIMM model;however the maximum error reaches 0.2 m/s which is due to the vehicle manoeuver.Fig.9 presents the velocity RMS errors using different schemes.It is clear that the AIMM filter behaves better in estimating the velocity for the north and east components compared with CEKF,among which the best velocity solution is the AIMM with GPS/BDS/INS configuration,and it outperforms its CEKF counterpart by 58.3%and 50%for north and east components,respectively.However,aslightdegradationcanbeseen in height direction.
The attitude and corresponding attitude errors for GPS/BDS/INS by applying AIMM are provided in Fig.10.The corresponding attitude RMS errors are shown in Fig.11.The results have shown that the heading accuracy is evidently worse than roll and pitch components.The AIMM still outperforms CEKF in attitude estimation,and the conventional IMM obtains similar performance compared with AIMM and has not been shown here.

Fig.10 Attitude and corresponding attitude errors for GPS/BDS/INS using AIMM.
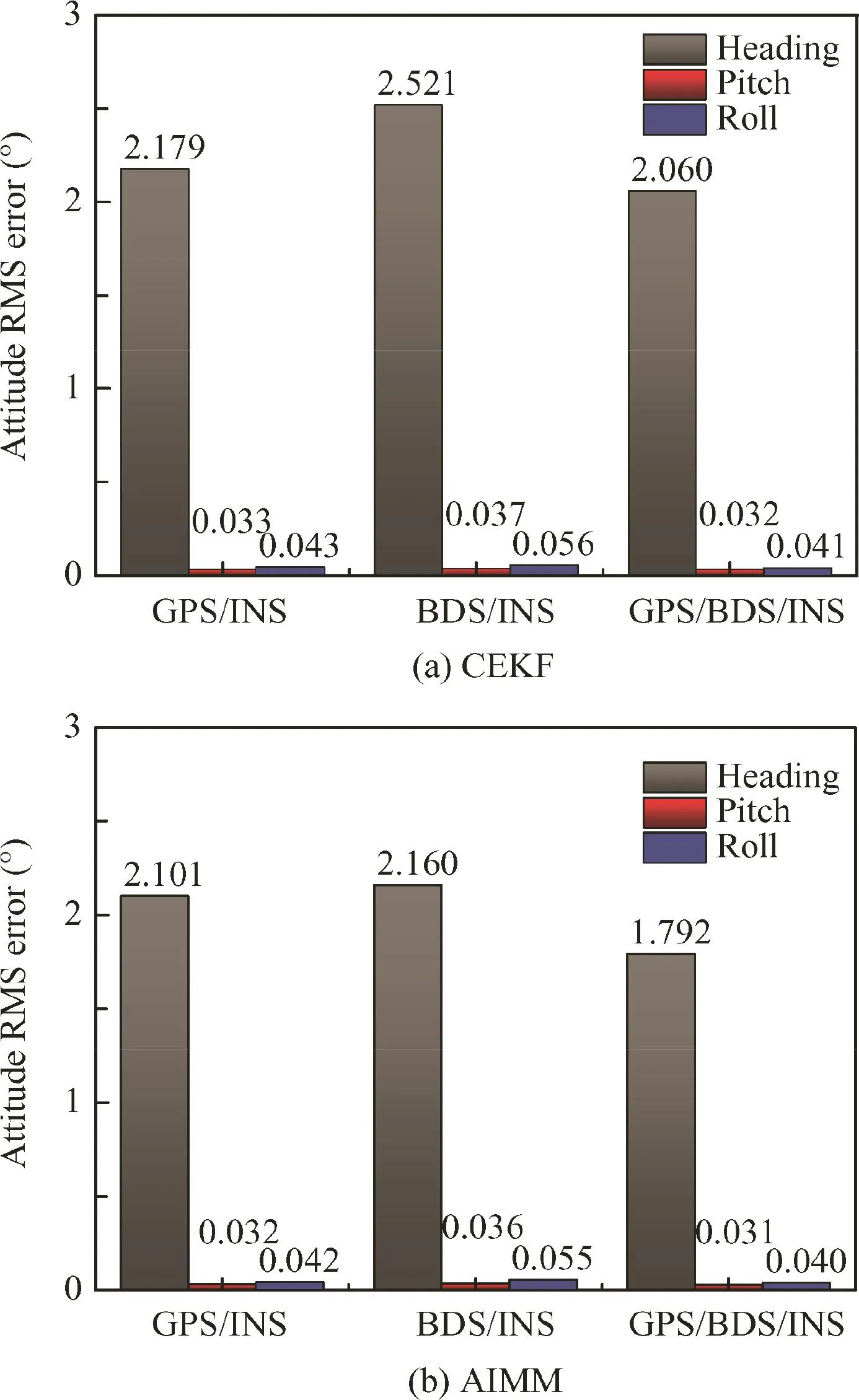
Fig.11 Comparison of attitude RMS errors for different schemes.
In addition,in order to check the filter switching capability,the mode probability of the AIMM filter with GPS/INS configuration is shown in Fig.12.The soft-switching capability enables the filter to automatically switch between lower and upper bounds of Qk,and it can capture the vehicle dynamics.
By applying the DD strategy,the atmospheric effects can be largely reduced for short baseline configuration.The residual errors are mainly multipath error and observation noise.For the carrier phase observations,the multipath and observation noise can be neglected compared with the counterpart of code observations.Once the DD carrier phase ambiguities can be fixed,the DD code multipath(L1 frequency band)can be calculated by
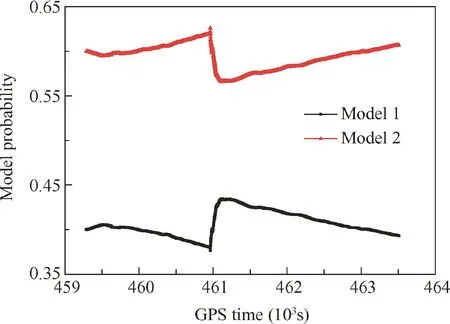
Fig.12 Model probability of AIMM for GPS/INS integration.

where Φ1and Φ2are carrier phase observables on L1 and L2 frequency band in meters respectively,f1and f2are frequency indicators,and N1and N2are fixed ambiguities.
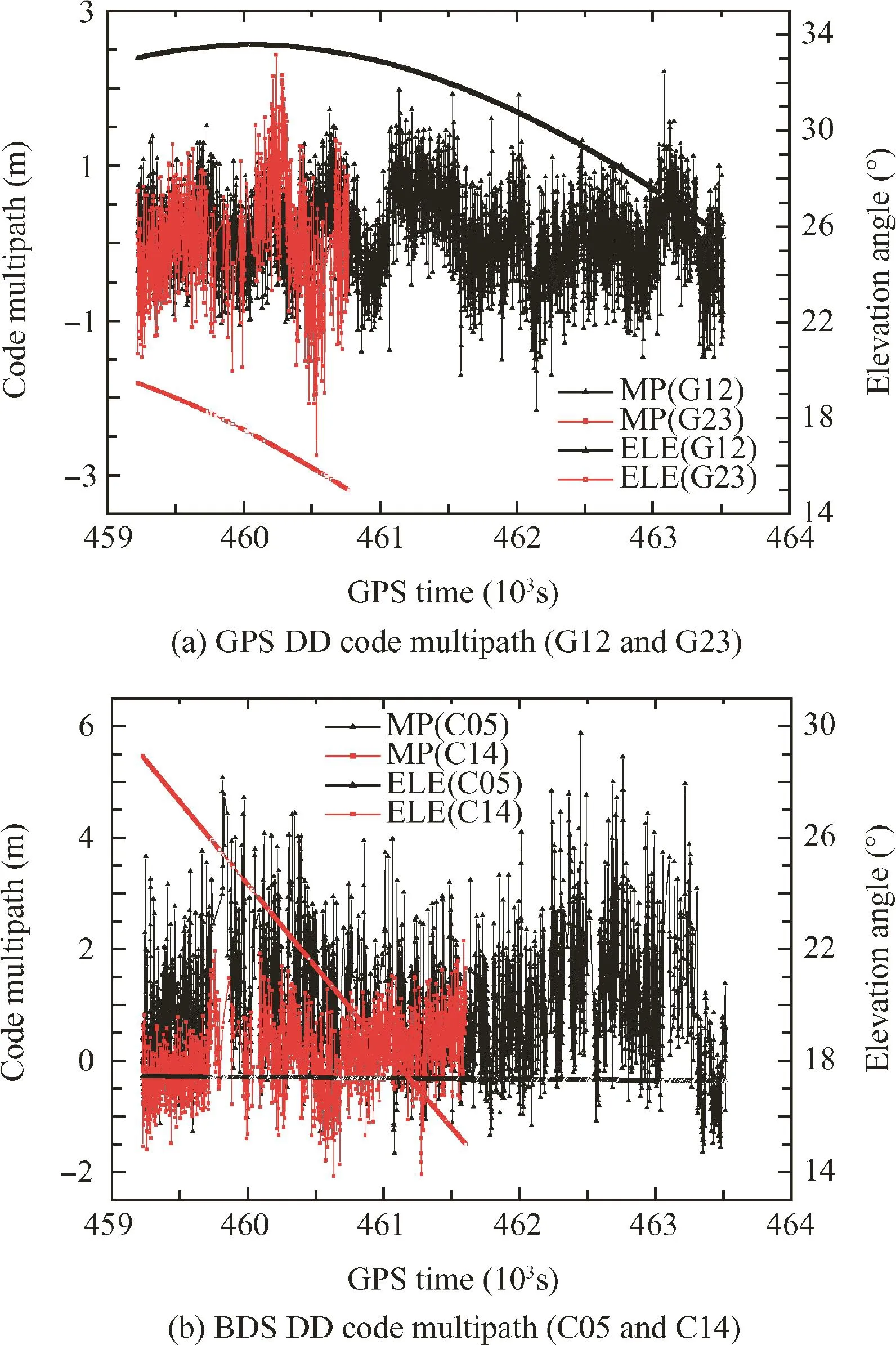
Fig.13 Double differenced code multipath for GPS and BDS during test.
In order to analyze the multipath effects during the test,Fig.13 shows the DD code multipath(code noise is included)for GPS and BDS at rover side,the satellite multipath error variations and corresponding elevation angle(ELE)variations for G12,G23,C05 and C14 are presented respectively.The base station is considered nearly multipath free in the open sky conditions.It can be seen that GPS code multipath maintains at the level of less than 2 m,and it is elevation-dependent in some degree.However,the code multipath for BDS GEO satellites is evidently more significant,which is due to their special configurations.The GEO code multipath is actually independent of the azimuth and elevation,and it might not only contain the effects from the surroundings,but also contain some systematic biases induced by the satellites.
The DD code residuals can be obtained when the measurement update step is finished.By applying the adaptive modeling strategy,the obtained residual in for mati on will be environment-varied.The DD code residuals(RES)and corresponding elevation angle variations for GPS and BDS from AIMM for GPS/BDS/INS integration are shown in Fig.14.It can be seen that the residual sequence follows a similar trend with multipath variations.The correlations between code residual and multi path reach 0.88 and 0.85 for G12 and G23,respectively.A higher correlation of 0.96 can be observed for C05,and the correlation for C14 is 0.85.It indicates that the AIMM filter can filter out the multi path disturbance,thus improving the positioning accuracy.
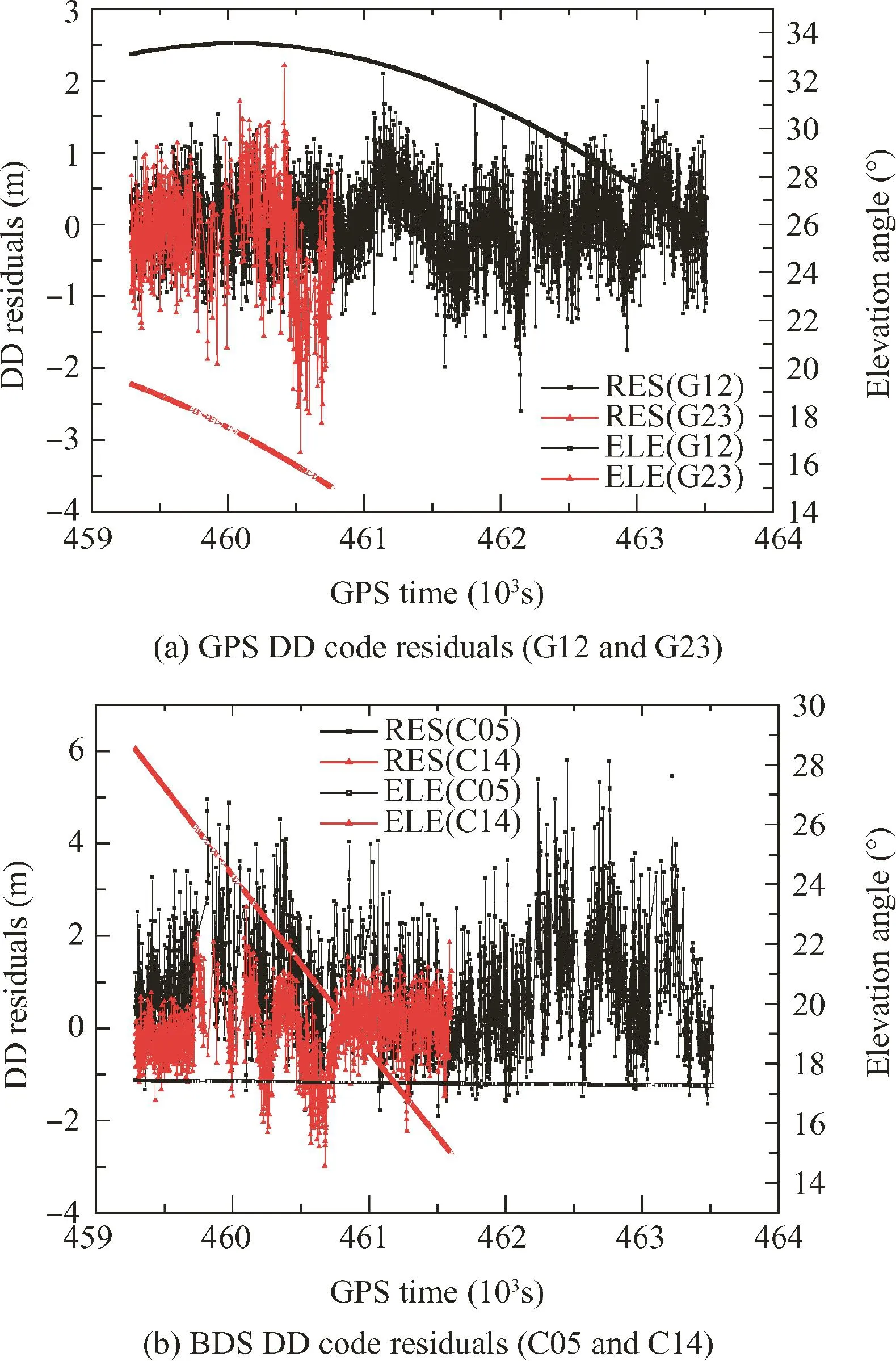
Fig.14 Double differenced code residuals for GPS and BDS during test.
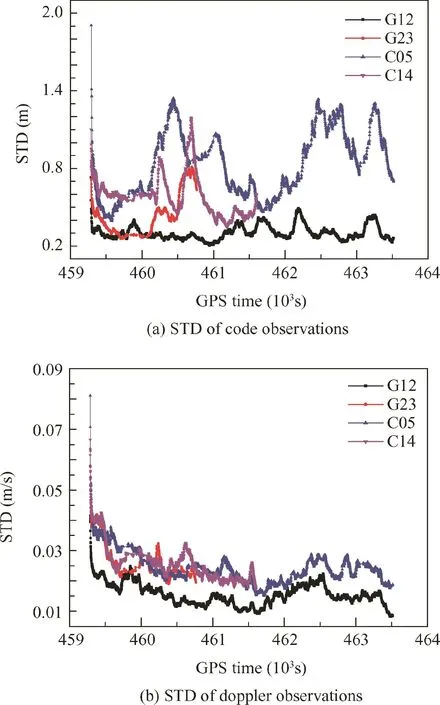
Fig.15 Undifferenced standard deviations of code and Doppler observations for GPS and BDS during test.
The estimated STandard Deviations(STD)(undifferenced)of code and Doppler observations obtained from AIMM with GPS/BDS/INS configuration are shown in Fig.15.It clearly shows that the measurement covariance is dynamically 34.3%and 33.9%for north,east and height components,respectively,with GPS/BDS/INS configuration.A comparable positioning accuracy of decimeter-level is obtainable for GPS/INS.However,in the tightly coupled implementation,BDS provides minor improvements due to the fact that lower-precision pseudorange observations are provided,especially for the GEO satellites in the dynamic environment.
(3)On the other hand,the AIMM filter provides the best performance in terms of velocity accuracy with GPS/BDS/INS configuration;however a slight accuracy degradation occurred for the height component compared with CEKF solution.In addition,the AIMM filter obtained larger accuracy improvement for heading estimates.
(4)The current research work essentially shows the feasibility of the approach.In future work,multi-GNSS integrated with INS for improving positioning accuracy and ambiguity resolution capability will be focused on and the advanced GNSS RAIM(Receiver Autonomous Integrity Monitoring)algorithm will be considered.
5.Conclusions
(1)This study developed a tightly coupled GPS,BDS and INS integration system for vehicle navigation applications.An adaptive IMM filter was presented to overcome the accuracy degradation problem caused by noise uncertainty for conventional EKF.The AIMM filter can dynamically adjust the process noise and measurement noise covariance, thus improving the estimation accuracy.In addition,the measurement specific sequential update strategy was applied aiming to reduce the computational effort.The field test was carried out to evaluate the effectiveness of the proposed method,and the collected data set was post-processed using various configurations.
(2)The test results show that the AIMM filter provides bet
ter results compared to the CEKF counterpart.The positioning accuracy has been improved by 35.8%,adapted using AIMM,and the precision of pseudorange observations is actually environment-dependent.The STD of GPS code observations at higher elevation(G12)converges to nearly 0.3 m,and the STD of code observations for BDS GEO satellites is much larger and more unstable.However,when the AIMM algorithm is used,the STD of Doppler observation is consistent with each other,which is irrelevant to the satellite elevation and type.The converged values maintain at the level of 1 to 2 cm/s.
Acknowledgements
This work is co-supported by the National Key Research and Development Program of China(No.2016YFC0803103),Beijing Advanced Innovation Center for Future Urban Design(No.UDC2016050100),and Beijing Postdoctoral Research Foundation.
1.Chiang KW,Duong TT,Liao JK.The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormalGPS measurementelimination.Sensors2013;13(8):10599–622.
2.Angrisano A,Petovello M,Pugliano G.Benefits of combined GPS/GLONASS with low-cost MEMS IMUs for vehicular urban navigation.Sensors 2012;12(4):5134–58.
3.Li XX,Zhang XH,Ren X,Fritsche M,Wickert J,Schuh H.Precise positioning with current multi-constellation Global Navigation Satellite Systems:GPS,GLONASS,Galileo and BeiDou.Sci Rep 2015;5:1–14.
4.Yang YX,Li JL,Xu JY,Tang J,Guo HR,He HB.Contribution of the Compass satellite navigation system to global PNT users.Chin Sci Bull 2011;56(26):2813–9.
5.Teunissen P,Odolinski R,Odijk D.Instantaneous BeiDou+GPS RTK positioning with high cut-off elevation angles.J Geod 2014;88(4):335–50.
6.Li M,Qu LZ,Zhao QL,Guo J,Su X,Li XT.Precise point positioning with the BeiDou navigation satellite system.Sensors 2014;14(1):927–43.
7.Shi C,Zhao QL,Li M,Tang WM,Hu ZG,Lou YD,et al.Precise orbit determination of BeiDou Satellites with precise positioning.Sci China Earth Sci 2012;55(7):1079–86.
8.Han HZ,Wang J,Wang JL,Tan XL.Performance analysis on carrier phase-based tightly-coupled GPS/BDS/INS integration in GNSS degraded and denied environments.Sensors 2015;15(4):8685–711.
9.Li ZK,Wang J,Li BH,Gao JX,Tan XL.GPS/INS/odometer integrated system using fuzzy neural network for land vehicle navigation applications.J Navigat 2014;67(6):967–83.
10.Gelb A.Applied optimal estimation.Cambridge(MA):MIT Press;1974.p.107–19.
11.Mohamed A,Schwarz K.Adaptive Kalman filtering for INS/GPS.J Geod 1999;73(4):193–203.
12.Hide C,Moore T,Smith M.Adaptive Kalman filtering for lowcost INS/GPS.J Navigat 2003;56:143–52.
13.Hu C,Chen W,Chen Y,Liu D.Adaptive Kalman filtering for vehicle navigation.J Global Position Syst 2003;2(1):42–7.
14.Yang Y,Gao W.An optimal adaptive Kalman filter.J Geod 2006;80(4):177–83.
15.Kim YS,Hong KS.An IMM algorithm for tracking maneuvering vehicles in an adaptive cruise control environment.Int J Control Autom Syst 2004;2(3):310–8.
16.Tseng CH,Chang CW,Jwo D-J.Fuzzy adaptive interacting multiple model nonlinear filter for integrated navigation sensor fusion.Sensors 2011;11(2):2090–111.
17.Cho T,Lee C,Choi S.Multi-sensor fusion with interacting multiple model filter for improved aircraft position accuracy.Sensors 2013;13(4):4122–37.
18.Lee H,Wang J,Rizos C.An integer ambiguity resolution procedure for GPS/pseudolite/INS integration.J Geod 2005;79(4–5):242–55.
19.Baritzhack IY,Berman N.Control theoretic approach to inertial navigation systems.J Guid Control Dyn 1988;10(10):1442–53.
20.Grejner-Brzezinska DA,Da R,Toth C.GPS error modeling and OTF ambiguity resolution for high-accuracy GPS/INS integrated system.J Geod 1998;72(11):626–38.
21.Bar-Shalom Y,Li XR,Kirubarajan T.Estimation with applications to tracking and navigation:theory algorithms and software.New York:John Wiley&Sons;2004.p.441–65.
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Recent development of a CFD-wind tunnel correlation study based on CAE-AVM investigation
- Correlation analysis of combined and separated eあects of wing deformation and support system in the CAE-AVM study
- High-speed wind tunnel test of the CAE aerodynamic validation model
- Multi-infill strategy for kriging models used in variable fidelity optimization
- Experimental research in rotating wedge-shaped cooling channel with multiple non-equant holes lateral inlet
- Numerical evaluation of acoustic characteristics and their damping of a thrust chamber using a constant-volume bomb model