电动汽车直流牵引电机驱动系统最优设计
2018-04-16严俊
严 俊
(1.湖南铁道职业技术学院 株洲 412001)(2.中南大学信息科学与工程学院 长沙 410075)
1 引言
目前,环境与资源因素已成为制约我国持续发展的瓶颈,因此,大发展电动汽车产业对促进国民经济的发展具有重要战略意义。电动车牵引直流电机的控制器是电动车的核心部件之一,对其开展研究具有重要意义[1~3]。
为满足电动车的大转矩、再生制动、稳定性、可靠性等要求,电动车一般采用复合励磁的直流电机作为牵引电机。传统的控制器对增磁绕组进行简单的励磁控制,当车辆需要大转矩时,利用接触器闭合使增磁绕组得电从而增磁。此种方式存在两个不足:一是无法实现电动车从低速到高速运行过程中的自动弱磁;二是控制器因使用接触器而降低了其工作的可靠性[4~6]。针对传统控制器的不足,本文设计了一种可依据电动车驱动要求对复合励磁直流电机进行最优控制的控制器。该控制器将增磁绕组接在电机控制系统的续流回路中,通过此种方式,满足了电机的弱磁调速的要求。由于避免了接触器的使用,提高了控制器的可靠性[7~10]。
2 直流牵引电机控制系统
电动汽车直流电机驱动系统简化电路如图1所示,电池组电压为384V,为驱动系统供电。SM为永磁加增磁绕组的复合励磁直流电机,包括电枢、增磁绕组L1、永磁绕组L2;IGBT1、IGBT2为两个功率模块,VD1和VD2是他们的反向保护二极管,另外两个功率模块还并联了一个R、C、VD浪涌电压保护电路。VD6是再生制动通路二极管模块,它也并联了一个R、C、VD浪涌电压保护电路。控制单元通过检测IGBT1功率模块的输出电流,再根据加速度信号和制动信号,决定功率模块的脉冲宽度,进而实现对电机转速的控制[11]。

图1 电动汽车直流电机驱动控制系统简化图
3 复合励磁电机的数学模型的建立
依据直流电机电枢电压与电流之间的关系可得:

式中,L为电机电枢绕组电感,R为电枢绕组电阻值,i为电枢电流,u为电枢两端外加电压,E为电枢感应电动势。
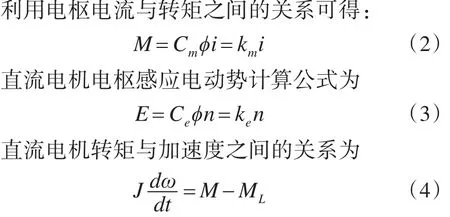
永磁加增磁复合励磁的直流电机的转矩M可视为与电枢电流i和转速n两个变量存在非线性关系的函数,M=f(i,n)。
为简化分析,在工作点将函数线性化,可得:

综合考虑式(1)~(7),永磁加增磁复合励磁直流电机的线性化结构图如图2所示。
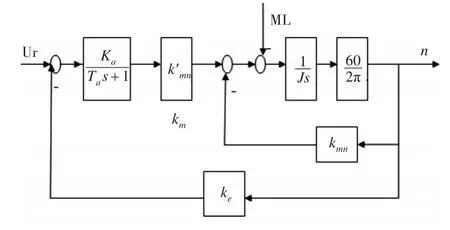
图2 带增磁绕组的驱动电机结构图
4 电动汽车驱动控制系统传递函数的确定
已知某驱动电机的电枢电阻为0.03835Ω、电枢电感为5mH、电流增益为26;另已知电流传感器输出电压为5V,驱动系统中的保护电路及滤波器时间常数估算为0.02s。依据上述参数,可以构建出图1所示的电动汽车驱动系统的仿真模型如图3所示。

图3 电动汽车驱动控制系统仿真模型图
依据图3,写出控制系统的状态方程:

5 控制系统的最优设计及仿真分析
根据矩阵A可求出特征值:

很明显,在状态反馈之前,控制系统是不稳定的。
线性二次型指标为

对Q取不同的值代入,进而得到了控制系统相应的阶跃响应仿真结果。通过比较这些模拟的结果,我们可以找出最佳的Q值。仿真图如图4所示。

图4 最优控制系统仿真图
如图4所示,图(a)显示控制系统不稳定,因此相应的Q值不适合;如图(b),系统单位阶跃响应是稳定的,但是控制系统的调节时间和超调量较大。

6 试验验证
采用图1的控制系统,进行突加速性能试验,试验结果波形如图5所示。
当采用普通控制时,从图5(a)中可以看出,当突然加大给定时,电机转速由最初的速度很难到达给定速度,系统不稳定。当采用最优控制时,从图5(b)中可以看出,调节时间和超调量较小,系统很快达到了给定的速度并稳定,控制性能好。
7 结语
本文针对传统电动汽车所存在的驱动难题,采用带增磁绕组的电机替代普通电机,以满足电动汽车的大扭矩要求;并运用最优控制思想对驱动控制系统进行设计,大大提高了驱动控制系统的控制性能。试验结果表明本文所采用的控制系统具有反应快、超调量小、运行平稳等优点。
[1]曹一家,谭益,黎灿兵,等.具有反向放电能力的电动汽车充电设施入网典型方案[J].电力系统自动化,2011,35(14):48-51.CAO Yijia,TAN Yi,NICanbing,etal.The network facilities typical scheme of electric car has a reverse discharge capacity of charging[J].Power system automation,2011,35(14):48-51.
[2]申超群,王晓侃,孙忠良.电动汽车充电站智能监控系统研究与设计[J].华东电力,2011,39(6):1000-1003.SHEN Chaoqun,WANG Xiaokan,SUN Zhongliang.Research and design of intelligentmonitoring system for electric vehicle charging station[J].EastChina electric power.2011,39(6):1000-1003.
[3]罗卓伟,胡泽春,宋永华,等.电动汽车充电负荷计算方法[J].电力系统自动化,2011,35(14):36-40.LUO Zhuowei,HU Zechun,SONG Yonghua,etal.Electric vehicle charging load calculation method[J].Power system automation,2011,35(14):36-40.
[4]MEHDIE,KENTC,JASON S.Rapid-charge electric-vehicle stations[J].IEEE Trans on Power Delivery,2010,25(3):1883-1887.
[5]李云雷,张津源.纯电动汽车电机驱动系统传动机构仿真分析[J].机械工程师,2015(9):164-167.LIYunlei,ZHANG Jinyuan.Simulation analysis of transmission mechanism of pure electric vehicle motor drive system[J].MechanicalEngineer,2015(9):164-167.
[6]崔玉峰,杨晴,张林山,等.国内外纯电动汽车发展现状及充电技术研究[J].云南电力技术,2010,38(2):9-12.CUI Yufeng,YANG qing,ZAHNG Linshan,et al.Research on the development status and charging technology of pure electric vehicle at home and abroad[J].Yunnan electric power,2010,38(2):9-12.
[7]钱科军,周承科,袁越.纯电动汽车与电网相互关系的研究现状[J].电网与清洁能源,2010,26(11):1-7.QIAN Kejun,ZHOU Chengke,YUAN Yue.Research status of the relationship between pure electric vehicle and power grid[J].Power grid and clean energy,2010,26(11):1-7.
[8]李海滨,李雪.电动汽车电机驱动控制系统的发展趋势探讨[J].电子世界,2015(22):15-17.LIHaibing,LIXue.Development trend ofmotor drive control system for electric vehicle[J].Electronicsworld,2015(22):15-17.
[9]王宇,唐广笛,王海滨,等.电动汽车电机驱动系统传导性电磁干扰的抑制[J].黑龙江科技信息,2016(29):79-80.WANG Yu,TANG Guangdi,WANG Haibing,et al.Suppression ofelectromagnetic interference inmotor drive system ofelectric vehicle[J].Heilongjiang Science and Technology Information,2016(29):79-80.
[10]谢恩,汪兆栋,汪玄旺.电动汽车电机驱动系统速度传感器故障诊断及容错控制研究[J].景德镇学院学报,2016,31(6):1-5.XIE En,WANG Zhaodong,WANG Xuewang.Research on fault diagnosis and fault tolerant control of electric vehiclemotor drive system[J].Journal of Jingdezhen Institute of technology,2016,31(6):1-5.
[11]刘小春,魏丽君.基于双向Z源逆变的纯电动汽车电机驱动系统[J].电源技术,2016,40(6):1273-1276.LIU Xiaochun,WEI Lijun.Pure electric vehicle motor drive system based on bidirectional Z source inverter[J].Chinese Journal of Power Sources,2016,40(6):1273-1276.
