基于再生运动链法的内螺纹加工装置机构创新设计研究
2018-04-09费琦琪张天会
王 强,果 霖,王 源,费琦琪,赵 聪,张天会
(云南农业大学机电工程学院,云南 昆明 650201)
机构的创新设计通常依靠设计者的知识阅历与灵感,这往往导致创新的效率不高[1-4]。为了提高机构创新设计的效率,就需要溯本求源地对机构创新设计的内在规律进行研究,使创新设计有据可循[5]。颜鸿森教授提出的基于运动链再生的机构创新设计理论,被称为再生运动链法,这是一种快捷、高效的设计方法,它不会因设计的多解性而遗漏方案,可以减少机构创新设计的盲目性[6]。笔者将再生运动链法运用到一种内螺纹加工装置上,使其获得与现有机构不同的新运动链,再对运动链的拓扑特性进行分析筛选,以期创造出满足相同功能要求的同性异形机构,达到机构创新设计的目的。
1 再生运动链机构创新设计的原理与步骤
在机构创新设计阶段,欲设计出满足预期要求的新机构,往往会遇到一些阻碍,如设计出的机构是已有机构。而再生运动链法正是解决此类问题的有效方法,它的本质就是从现有机构出发,利用图论中杆组组成原理[1,4,7],依据原始机构的拓扑特性,将原始机构抽象为一般运动链,并对一般运动链进行数综合,得出可能符合要求的运动链图谱,再根据实际功能要求,提出设计要求与约束条件,筛选出符合要求的可行运动链图谱,然后将可行运动链图谱具体化为可行机构简图,最后删除现有机构,得到新型机构。再生运动链法的一般过程如图1所示。
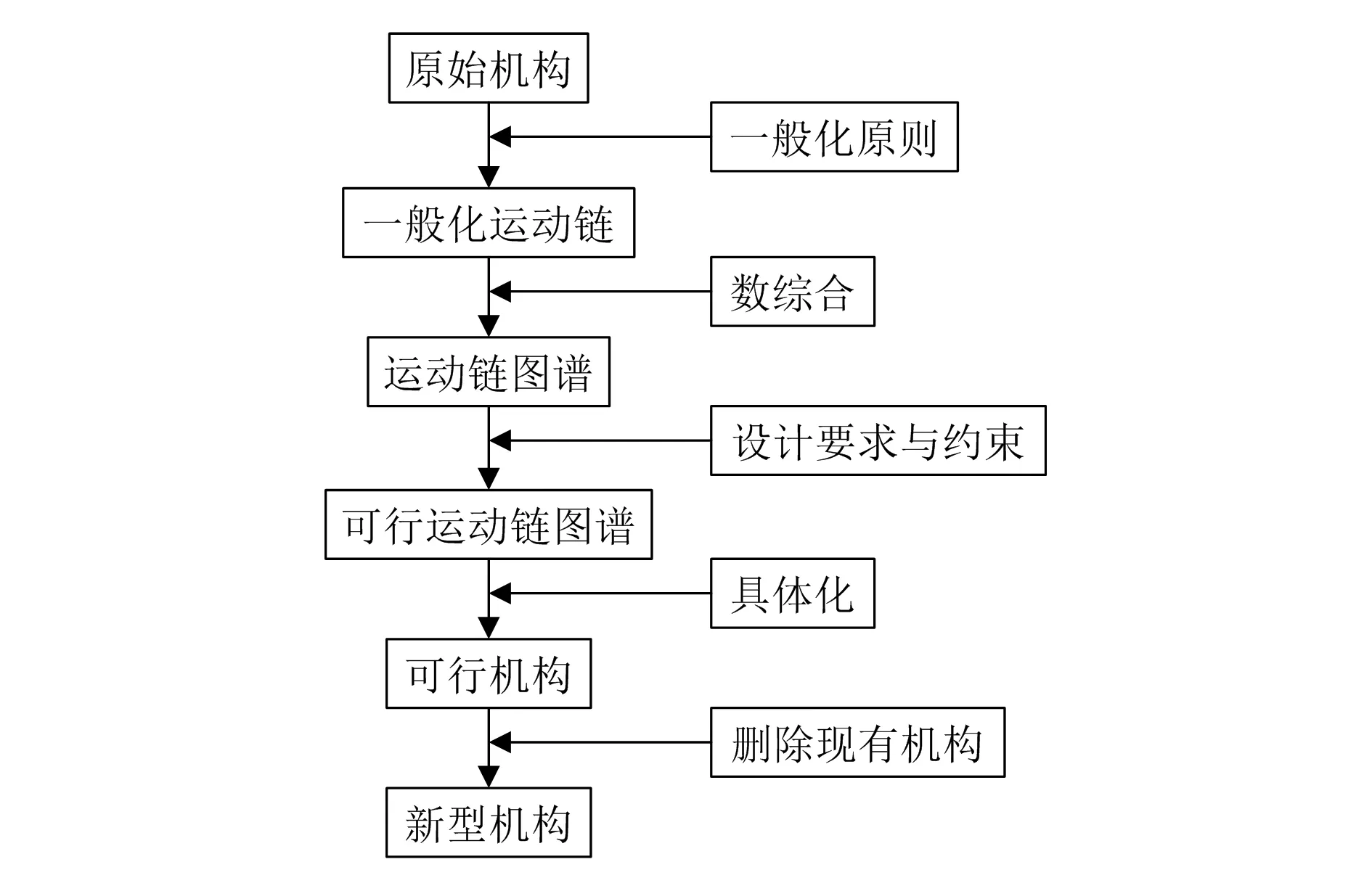
图1 再生运动链法的一般过程
2 再生运动链法内螺纹加工装置的机构创新设计过程
2.1 原始机构
该内螺纹加工装置主要由曲柄滑块机构、滚珠丝杆机构和齿轮啮合机构组合而成,如图2所示。曲柄滑块机构(1~4)带动丝杆(5)转动,丝杆通过齿轮啮合(h)将运动传递给丝锥(8),由于丝锥与固定于机架上的螺母(9)存在螺旋副,当丝锥转动时,也会向下平动,从而同时实现丝锥的转动与进给。
2.2 一般化运动链
根据一般化原则[1],通过如下步骤将该内螺纹加工装置进行一般化处理,其对应的一般化机构图如图3所示。由于在一般化原则中,齿轮副与螺旋副都将用二副杆表示[8],故需注意图3的数字编号与图2的数字编号并不是完全一一对应。以下步骤中的编号为图2中的编号。
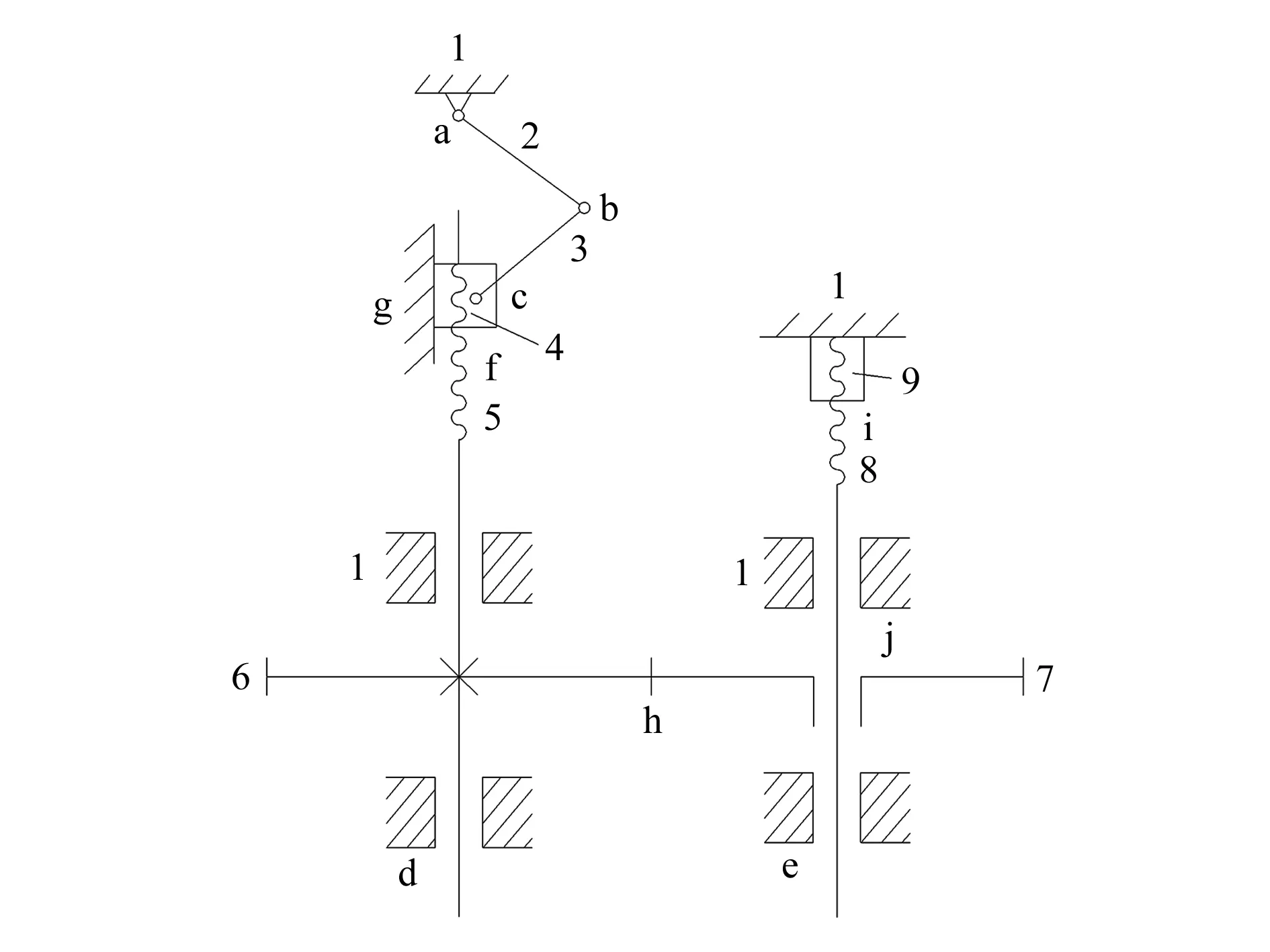
1—机架;2—曲柄;3—连杆;4—滑块;5—丝杆;6—大齿轮;7—小齿轮;8—丝锥;9—螺母
步骤1,将机架(构件1)释放,并一般化为五副杆;
步骤2,齿轮6,7分别一般化为2个三副杆;
步骤3,齿轮副h一般化为两端各有1个一般化转动副的二副杆;
步骤4,螺旋副f,i分别一般化为两端各有1个一般化转动副的二副杆;
步骤5,滑块4同时存在滑动副、转动副与螺旋副,故一般化为1个三副杆。
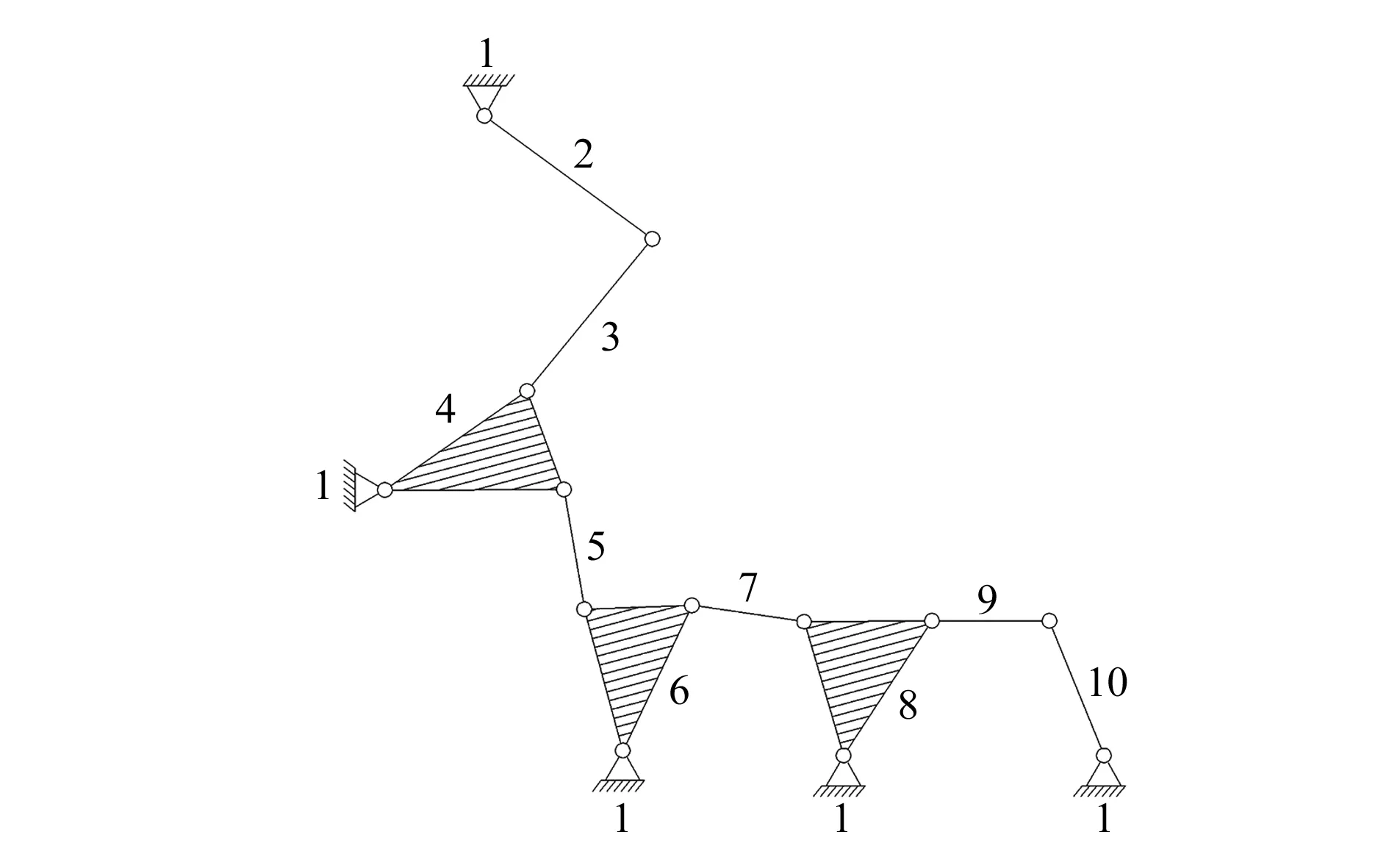
1—机架;2—曲柄;3—连杆;4—滑块;5—螺旋副一般化后的二副杆;6—大齿轮;7—齿轮副一般化后的二副杆;8—小齿轮;9—螺旋副一般化后的二副杆;10-滑动副一般化后的二副杆
图3内螺纹加工装置一般化结构
在图3中,杆4为滑块一般化后的三副杆;杆5与杆10为螺旋副一般化后的二副杆;杆7为齿轮副一般化后的二副杆;杆6与杆8为两个齿轮一般化后的三副杆;杆9为丝锥一般化后的二副杆。所以该装置是个具有10个一般化连杆和13个一般化转动副的一般化运动链,如图4所示。
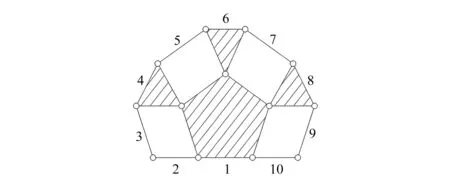
图4 一般化运动链
2.3 数综合
运动链图谱中,十杆13副无复合铰链的运动链,共有230种。其中:
1) 含有2个五副杆、8个二副杆的十杆运动链有2种;
2) 含有1个五副杆、1个四副杆、1个三副杆和7个二副杆的十杆运动链有8种;
3) 含有1个五副杆、3个三副杆、6个二副杆的十杆运动链有15种;
4) 含有3个四副杆、7个二副杆的十杆运动链有3种;
5) 含有2个四副杆、2个三副杆、6个二副杆的十杆运动链有57种;
6) 含有1个四副杆、4个三副杆、5个二副杆的十杆运动链有95种;
7) 含有6个三副杆、4个二副杆的十杆运动链有50种。
2.4 定义设计要求与约束
1) 必须有一个杆件作为机架,且为五副杆;
2) 必须有一个曲柄滑块机构,即必须有2个二副杆串联而成的杆组一端与机架相连,另一端与1个多副杆相连;
3) 曲柄两端不允许有复合铰链;
4) 必须有一个丝锥,且与机架相连。
2.5 可行运动链图谱
按照设计要求与约束,可从十杆运动链图谱筛选出11种运动链,如图5所示。通过比较发现,图5(b)就是现有内螺纹加工装置的一般化运动链,故应删去,因此实际上共得到10种新的可行运动链。
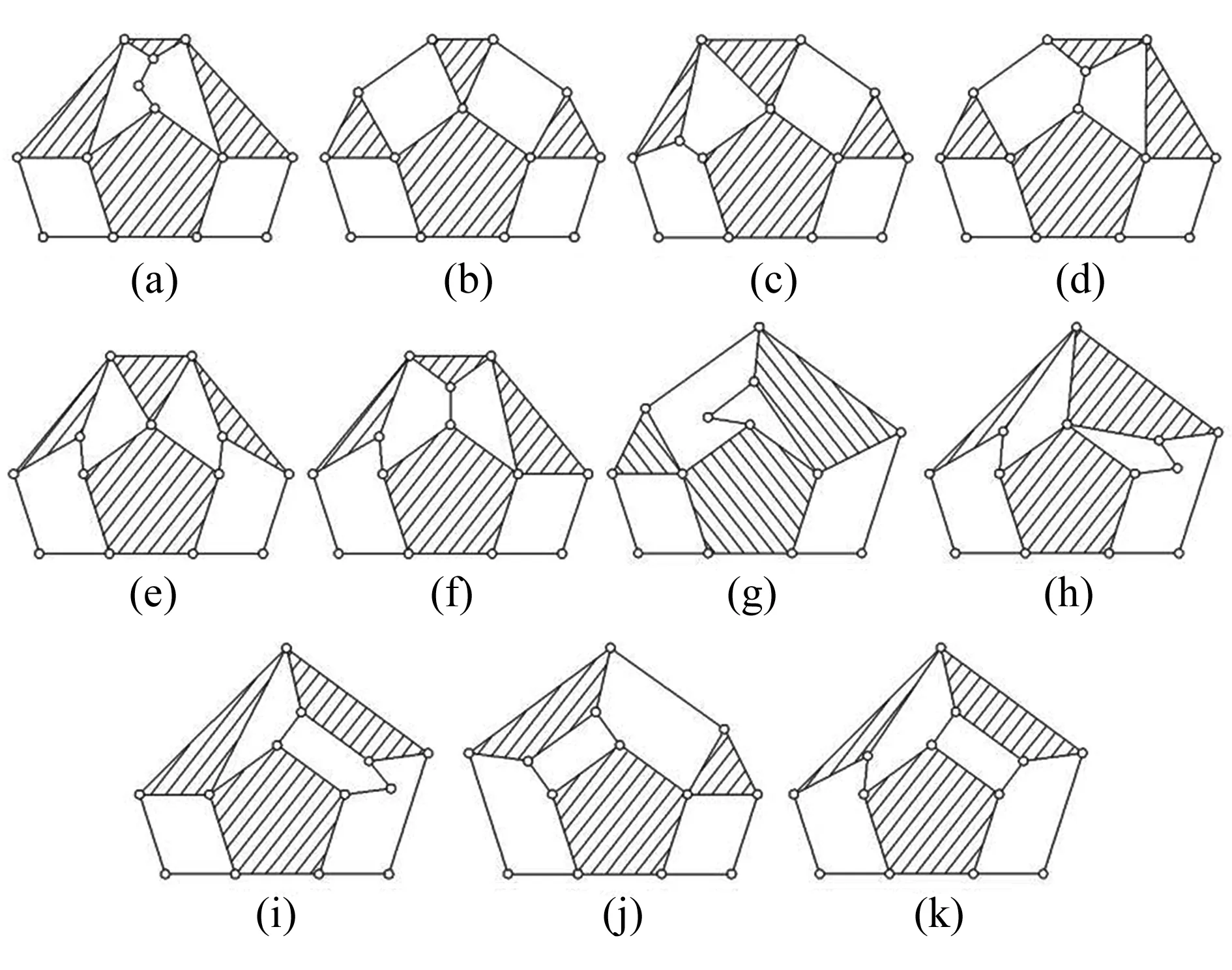
图5 可行运动链
2.6 运动链的具体化
根据筛选出的可行新运动链,经过一般化原则的逆程序,将它们还原为10种不同的新机构,且完全不同于现有机构。
至此,再生运动链法的所有步骤都已完成,然而实际上在筛选出多种可行新运动链后,还要面临选择哪种可行运动链作为最终方案的问题。须知运动链往往是不反映构件的实际尺寸与运动副的实际空间位置关系的,而运动链的拓扑特性分析可以在不涉及构件实际尺寸与运动副实际空间位置关系的情况下,仅通过构件与运动副数目以及它们之间的连接关系,研究运动链的固有属性[9],为预测机构的实际特性以及选择运动链作为最后方案,提供数学意义上的参考依据。
3 运动链的拓扑特性分析
本文随机选取可行运动链中一个运动链与原始机构的运动链,对二者的机械利益、紧凑性与刚性等基本特性进行深入分析比较[10-12]。如图6所示,图6(a)为一个可行运动链,图6(b)为原始机构的运动链。
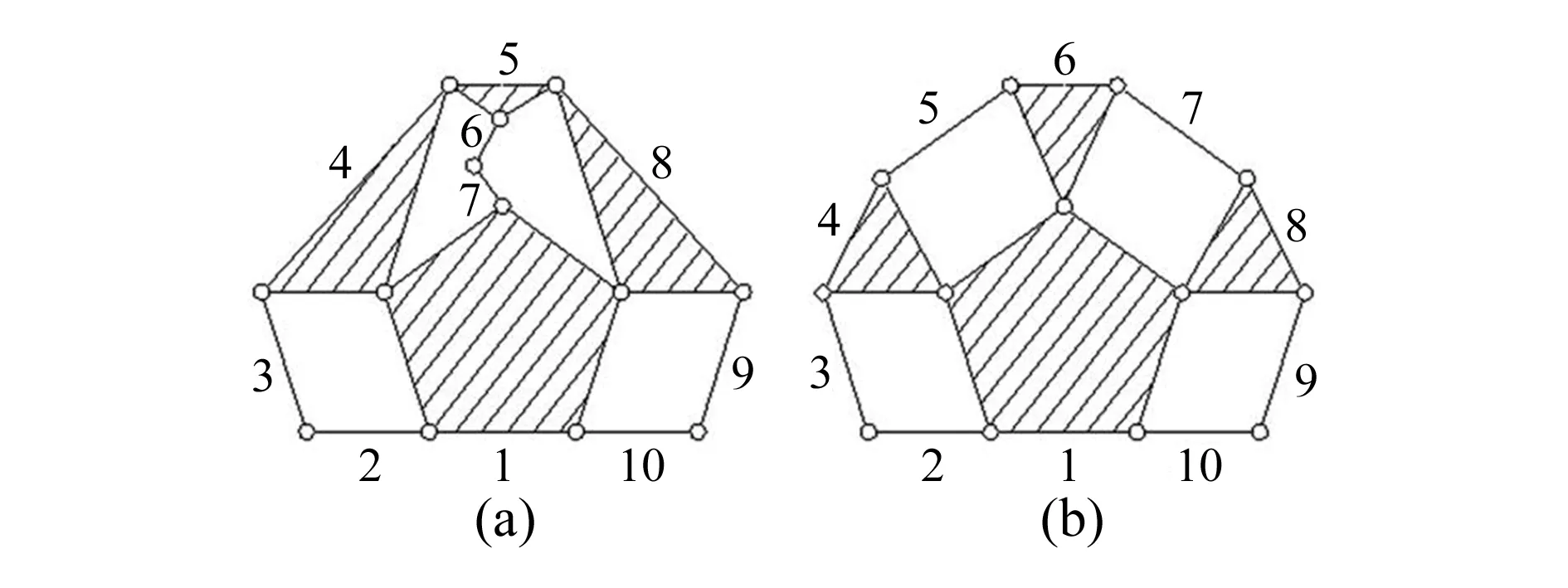
图6 一个可行运动链与原始运动链
3.1 机械利益
机械利益是指机械系统的输入力与输出力之比,用于反映其运动链传力性能的强弱。一个忽略能量损失的理想机械系统,即输入功与其输出功相等,则有:
FiΔx=FoΔy
(1)
式中:Fi,Δx分别为机械系统的输入力与输入力位移;Fo,Δy分别为机械系统的输出力与输出力位移。故可得机械利益M:
M=Fo/Fi=Δx/Δy
(2)
由式(2)可知,欲提高机械利益M,可通过选取位移较大的杆件作为输入杆,选取位移较小的杆件作为输出杆。适用于运动链的输入与输出为非线性关系,且运动链产生的非线性运动潜力越大,其机械利益可能也越大。
通常,连杆机构的输入与输出关系往往是非线性的,其运动链的拓扑结构对非线性运动潜力有着不小的影响。由文献可知,在运动链的一个闭环中,所包含的杆件数越多,其非线性运动潜力越大,即其获得的机械利益也越大。
如图6(b)所示,其运动链含有4个闭环,即1—2—3—4,1—4—5—6,1—6—7—8,1—8—9—10,都为四杆闭环。而图6(a)中的运动链含有4个闭环,其中有2个四杆闭环:(1—2—3—4,1—8—9—10)和2个五杆闭环:(1—4—5—6—7,1—8—5—6—7)。由于五杆闭环的非线性运动潜力大于四杆闭环的非线性运动潜力,所以图6(a)所示的运动链比图6(b)所示的运动链可能获得更大的机械利益。
3.2 紧凑性
结构紧凑的机构具有良好的静态特性,且占用的空间较小。在不考虑杆件长度的情况下,杆件数及运动副数越少,运动链就越紧凑。在具有相等杆件数及运动副数的运动链中,可以通过定义杆件间的距离关系,以此定量比较它们的紧凑性。
将两杆间的距离关系定义为:在运动链中,从一杆出发到达另一杆所经过的最少运动副数。根据定义,可以得到运动链的距离矩阵D。在矩阵D中,元素dij为从杆i出发到达杆j所经过的最少运动副数,其中dij=0。在矩阵D中∑dij称为运动链的距离值。距离值越小的运动链,结构就越紧凑。
根据定义,可分别写出图6(a)运动链与图6(b)运动链的距离矩阵D1,D2。
分别将这两个矩阵中各自的所有元素求和,可得图6(a)运动链的距离值为186,图6(b)运动链的距离值为208。因为图6(a)运动链的距离值较图6(b)运动链的小,所以图6(a)运动链的紧凑性要好于图6(b)运动链。
3.3 刚性
在实际机械结构中,杆件的刚性由它的尺寸、弹性系数以及实际支承情况决定。而本文中,不考虑杆件的尺寸,仅将其视为弹性体,每个杆的支点数目等于该杆的运动副数,即该杆的连通度。故可得刚度矩阵K=[kij],其中:
(3)
式中:Ci,Cs,Cj分别为杆i,s,j的连通度。
式(3)中,当i≠j时,在该分式的分母中,杆s代表从杆i出发到达杆j的最短路径所经过的所有杆件。若两杆间存在不止一条最短路径,则取使kij最小的路径为最短路径。在运动链的刚度矩阵K中,每一行元素之和,表示该行所对应的杆的刚度,矩阵全部元素之和则对应该运动链的刚度。
根据定义,可分别写出图6(a)与图6(b)运动链的刚度矩阵K1,K2:
根据定义,可以得出图6(a)运动链的刚度∑kij=174.65,同理得出图6(b)运动链的刚度为173.06,故图6(a)运动链的刚度要大于图6(b)运动链的刚度。
本节只随机选取了一种运动链与原始机构的运动链进行对比分析,而在余下的运动链中,可能会存在比所选的运动链具有更优拓扑特性的运动链或者比原始机构运动链更差拓扑特性的运动链,因此实际筛选时需要同时比较所有可行运动链的拓扑特性,才能科学地得出合适的运动链。
4 结束语
再生运动链法是一套系统化、程式化并含有理论支撑的设计方法,既不会因设计的多解性而遗漏方案,也不会因其多解性而重复方案,可有效提高创新设计效率,减少创新设计盲目性,帮助设计人员找到符合要求的新运动链。结合运动链的拓扑分析,研究运动链的固有属性,设计人员可以从数学层面上直观、定量地了解运动链的特性,并易于比较运动链之间的特性差异,使设计方案保有预见性与合理性,可为设计人员提供充分的理论参考依据。
参考文献:
[1]颜鸿森.机械装置的创造性设计[M].姚燕安,译.北京:机械工业出版社,2002.
[2]邹慧君.机构系统设计[M].上海:上海科学技术出版社,1996.
[3]黄纯颖.机械创新设计[M].北京:高等教育出版社,2000.
[4]张春林.机械创新设计[M].北京:机械工业出版社,1999.
[5]张宁,姚立纲,张炜.基于再生运动链法的游梁式抽油机机构创新[J].机械设计与研究, 2014(5):41-44,49.
[6]葛茂忠.基于运动链再生创新设计理论的冲击攻丝机的研制[J].新技术新工艺,2010(2):48-50.
[7]卢开澄.图论及其应用[M].北京:清华大学出版社,1984.
[8]葛茂忠.机构创新设计理论及其在冲击攻丝机上的应用研究[D].昆明:昆明理工大学,2004.
[9]彭朝琴,符炜,郭承志. 概念设计中常用基本链型的拓扑特性分析与比较[J].机械设计,2002(8):48-51.
[10] RAO A C.Topological characteristics of linkage mechanism with particular reference to platform-type robots[J]. Mechanism & Machine Theory,1995,30(1):33-42.
[11] RAO A C.Structure-based dynamic characteristics of planar linkages including platform-type robots[J].Journal of Robotic Systems,1997,14(8):621-629.
[12] RAO A C.On the performance of kinematic chains[J]. Transactions of the Canadian Society for Mechanical Engineering,1988,12(2):99-102.
