一种基于观测值域的GNSS伪距多粗差验前探测方法
2018-04-09吴风波宋歌
吴风波,宋歌
(1.内蒙古自治区航空遥感测绘院,内蒙古 呼和浩特 010010;2.内蒙古自治区地图院,内蒙古 呼和浩特010051)
0 引 言
卫星导航正朝着多频多系统的方向发展,导航用户可观测的卫星数据越来越多。一方面,定位结果的可用性、可靠性将大大增强;另一方面,GNSS系统同时在多个卫星观测值上出现粗差的概率也变大了[1]。利用最小二乘或卡尔曼滤波的GNSS定位解算,抗差性能较差,如果不能准确地发现和妥善处理观测数据中存在的粗差,导航定位的结果可能会受到严重影响甚至不可用[2]。接收机自主完好性监测(RAIM)中采用的算法是目前GNSS导航定位中主要采用的抗差方法,它是根据用户接收机的多余观测值监测用户定位结果的完好性,识别卫星观测值中的粗差[3-4]。RAIM算法是以数理统计理论为基础的假设检验和可靠性理论为基础进行粗差探测和排除的[5]。传统的RAIM算法主要有距离比较法、最小二乘残差法、奇偶矢量法和最大间隔法等。这些方法对于单粗差探测效果显著,但对多粗差则并不理想[6]。
多粗差探测是平差理论中的一个重要问题,许多学者从数学方法上对此进行了研究。於宗俦、李明峰提出多维粗差同时定位与定值法[7],并模拟数据进行了验证;岑敏仪基于条件平差模型提出了粗差能否发现和定位的验前方法[8];欧吉坤提出并发展了粗差的拟准检定法[9],为多粗差的探测理论提供了新的思路;归庆明提出了基于方差膨胀模型的多粗差探测方案[10],并进行了大量实验验证。另外,还有一些学者在相关观测的粗差探测上做了不少研究[11]。但上述方法大多停留在数理理论研究层面,尚未见于GNSS导航定位的实际应用中。GNSS导航定位中,多粗差探测方法主要有向前向后探测法、基于相关分析的方法[12]以及新息序列探测法等,其理论效果优于传统的单粗差探测法;吴云对比了最小二乘残差法与新息序列检测法[13],用模拟数据以及实测数据证明了新息序列法在多粗差情况下明显优于传统方法。
以上方法均是从最小二乘出发,利用数理统计理论的方法进行验后多粗差探测,其实际探测效果不够理想。这是因为,从验后残差角度探测粗差存在两大难题:一方面,在GNSS导航定位中,测站坐标参数需要迭代计算,这在一定程度上造成观测值之间粗差的相互转移;另一方面,当卫星观测结构不好时,残差之间的相关性强,粗差的可区分性就会大大减弱,影响多维粗差的准确探测。而从验前观测值出发进行多粗差探测,则不会存在上述困难。为此,本文提出了一种基于观测值域的验前多粗差探测的新方法,并采用IGS静态数据对该方法多粗差(2维、3维、4维)探测性能进行了分析,最后应用该方法对模拟多粗差的数据进行了处理以分析其实际处理效果。
联系人: 吴风波 E-mail: 767679562@qq.com
1 多维粗差探测方法
1.1 粗差检验量构造方法
由GNSS伪距观测方程[1]计算k历元i星与接收机之间卫地距概略误差公式如下:
(1)
式中: D表示卫地距概略误差; P表示伪距观测值; ρ表示卫地距计算值,dr为其计算误差; dP为卫星信号传播路径上的所有延迟影响,包含卫星钟差、接收机钟差以及硬件延迟,电离层延迟和对流层延迟; ε包含伪距多路径和测量噪声综合影响。
在卫星间作差可以消除接收机钟差和接收机端硬件延迟,对i、j卫星卫地距概略误差做星间差可得卫地距概略误差“单差值”:
(2)
式中,*ij=*i-*j,表示星间差。在采样间隔较短时,电离层延迟和对流层延迟在没有发生剧烈空间天气的情况下变化很小,在历元间做差时可以消除。卫星钟差以及卫星端硬件延迟在短时间内变化较小,也能通过历元间差分进行消除。
对卫地距概略误差“单差值”做历元间差分,进一步消除卫星信号传播路径上的各种残余延迟。构造的粗差检验量为
(3)
式中,*k,k-1=*k-*k-1,表示相邻历元差值;j为参考卫星。从式(3)可见,经过星间单差和历元间差分后的卫地距概略误差,只受卫地距计算误差和伪距观测噪声的影响。在伪距观测值没有粗差的情况下,卫地距计算误差以及伪距观测噪声都符合零均值白噪声特性,假如能获取这两项误差分布特征值(方差),则可直接构建假设检验进行粗差探测。
1.2 粗差检验量分布特征值
伪距观测噪声在经过上述线性变化后被放大,但仍然为高斯白噪声。下面对卫地距概略误差及其变换后的误差进行分析。
(4)
根据误差传播率,可由接收机位置误差与卫星位置误差推导卫地距计算误差
(5)
式中:l、m、n为方向余弦,满足l2+m2+n2=1.
由式(3)可知,DV主要受单差中卫地距计算误差、多路径和伪距观测噪声的影响。卫星位置由广播星历解算,接收机坐标由前一历元位置结合多普勒测速进行预测得到,由此计算卫地距的误差具有白噪声特性。由于卫地距解算时未作SPP,在卫星位置计算时无法加上接收机钟差改正,因而获取的卫地距计算值包含了接收机钟差带来的误差。这一误差可以在星间单差中消除。残存多径的影响可以在历元间单差中极大削弱,对粗差检验量的影响较小。因此,DV在伪距观测值无粗差时近似为零均值白噪声,可以通过对DV做假设检验来探测粗差。
在已知接收机位置精度以及广播星历精度的情况下可由误差传播定律求得DV计算误差
(6)
由GNSS相关专业知识以及前述理论分析可得出计算误差项,如表1所示。
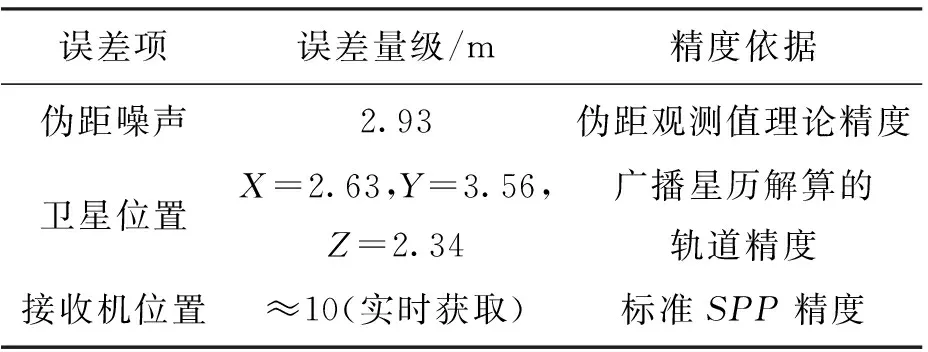
表1 DV计算值各误差项计算方法
表中各误差项是指在计算DV时的误差项,其中卫星位置的计算精度为采用广播星历进行卫星轨道计算的精度,采用经验值;接收机位置由前一历元的SPP位置结合多普勒测速进行预报,由于测速精度优于分米/秒级,故而其精度等价于上一历元的SPP精度。由前述理论可知,在构建粗差检验量时,DV值及其计算精度只与当前接收机位置、伪距观测噪声以及各个卫星的位置有关,各卫星伪距观测值的粗差检验量互相独立。因而,本方法进行多粗差探测时不存在类似于基于最小二乘方法粗差可区分性的难题。另外,在进行粗差探测时,由于直接从原始观测值出发,从而不需要进行定位解算就能较好进行探测,这在卫星数较少的情况下不会发生误差转移等现象,优势更为明显。
1.3 粗差探测方法
本文粗差检验是基于假设检验进行,由前述检验量的零均值白噪声特性可以构建假设检验。即零假设意味不存在粗差,且其均值为0.
H0:E(DV)=0,
(7)
则备择假设为
H1:E(DV)≠0 .
(8)
由于不存在粗差的检验量服从零均值白噪声分布,则零假设检验可由已知标准差的零均值高斯分布做检验。
H0:w=DV:N(0,σ) .
(9)
则给定显著性水平α,检测粗差的置信概率为
(10)
在测量领域中,一般取95.5%的置信概率认为正态性显著,本文也以此作为显著性的判断阈值。若通过显著性检验,则认为以95.5%的置信概率不存在粗差。
检验中,检验量的计算误差σDV与卫星的方向余弦、接收机的位置误差有关,因而每个历元每颗卫星的粗差检验量的计算误差都不相同。由式(3)计算每个历元所有非参考卫星的DV值,由式(6)计算其相应的检验量计算误差,再按照前述假设检验方式探测每个历元的粗差观测值。
由前所述,双差法粗差探测的流程图如图1所示。
2 检验量分布特性分析
2.1 检验量随机分布特性
基于上述理论分析,本节结合实际数据作进一步验证。在实验中,选取IGS提供的BOGT站2014年1月1日到1月5日的采样频率为1Hz的GPS数据作分析。在按照前述算法计算DV真值时以IGS站坐标真值作为接收机位置。图2是1月1日该站全天所有卫星DV的时间序列图(不同颜色表示不同卫星),从图中可以看出,每颗卫星的粗差检验量几乎都在零均值附近做随机波动,随机特性比较明显,这表明在实际数据的处理中,双差后各项系统误差(大气延迟误差、接收机钟差等)都消除比较充分,这一点与理论吻合。另外,DV计算值的波动幅度都比较小,绝大部分时刻各卫星的DV均在±5 m之间。这是由于使用了接收机坐标真值计算DV,且IGS观测站接收机性能较好,观测条件较好。各卫星变化幅度基本一致,这是由于GPS各卫星在一天之中,方向余弦的变化是类似的。
图2反映了检验量的随机特性,并不足以说明检验量是白噪声。图3展示了6颗卫星DV值理论正态分布与其实际概率分布的对比,可以看出每颗卫星DV值的实际分布都与其理论的正态分布较为接近。这表明本方法理论部分对双差检验量的白噪声假定是合理的。另外,图中还反映出不同卫星DV分布的方差不尽相同,这有两方面的原因:一是在观测时段内,不同卫星可视弧段长短不同导致参与数理统计的样本数量不同;一是不同卫星的卫星轨道精度、伪距观测值质量存在一定差异。
2.2 检验量的离群特性
一个合格的粗差检验量在含粗差的时候具有非常明显的离群特征。为了验证本方法检验量是否具备该特性,对原数据加入粗差进行分析。在模拟粗差时,在每10个历元中的第三历元任意两颗星加入30 m粗差,每天的数据中总共加入16 506个粗差。图4示出了部分卫星加入粗差后DV的时间序列图。其中,蓝色部分为不含粗差的历元,绿色为受粗差影响的历元。从图中可以明显看出,受粗差影响的DV与不含粗差的DV值显著的区分开了:不含粗差的DV分布在零值附近,波动范围为-10~10 m;受粗差影响的历元则分布在正负30 m左右。需要指出的是,图中离群于中心的DV值并不都是加入粗差的历元,有一半是加入粗差的紧邻历元。出现这种现象的原因是在某一时刻某颗卫星若存在粗差,其相应的单差值必然会异常,而下一历元在双差时用到了这一异常值,必然同时发生异常,这导致相邻历元DV大小接近符号相反,这也是双差检验法探测粗差的一个不足。在实际应用中,每次在探测到粗差后需要重新初始化检验量信息。尽管如此,加入粗差的卫星在加入历元仍然被准确的探测到,这表明本方法在探测粗差时是足够显著的。
综上所述,双差法构建的粗差检验量在含粗差时具有显著的离群特征,而且离群量级随着粗差的增大而增大。
3 粗差探测与处理
3.1 多粗差探测
为了评价本方法探测粗差的效果,在此定义两个探测指标:准确探测率(ADR)和错误探测率(EDR)。准确探测率反映方法探测粗差的正确率,错误探测率则反映方法的误判概率。这两个指标的计算公式为
(11)
式中,Gnum、Dnum、Anum分别为实际粗差总数、探测到的粗差数目、准确探测到(探测到的粗差位置需与模拟的完全一致)的粗差数目。
实验时,在数据中每隔10 s在第三个历元分别随机选取2颗、3颗和4颗卫星加入30 m粗差进行探测,加入的粗差总数分别为16 506、24 759、33 012个。表2示出了本文方法分别对2粗差、3粗差和4粗差的探测效果。从表中可以看出,不论粗差数目有多少,方法的准确探测率都在92%以上。另外,在4粗差时,方法的准确率也只是略低于3粗差和双粗差,这表明方法探测粗差的性能受粗差数目影响较小。同时,多粗差探测时的错误探测率均不到1%,这表明本方法在多粗差探测中可靠性较高。
本方法的粗差探测率低于95%,可以从两个方面分析其原因。一方面,从数理统计观点来看,在探测中使用的置信概率为95%,其探测率理论上低于95%;另一方面,尽管笔者已经尽可能计算出了更准确的DV计算误差,但由于伪距多路径、轨道误差的残余影响,无法计算出其100%的准确值。假设检验的关键在于精确的检验量分布的确定,因而本方法在DV计算误差上还有进一步改进的空间。
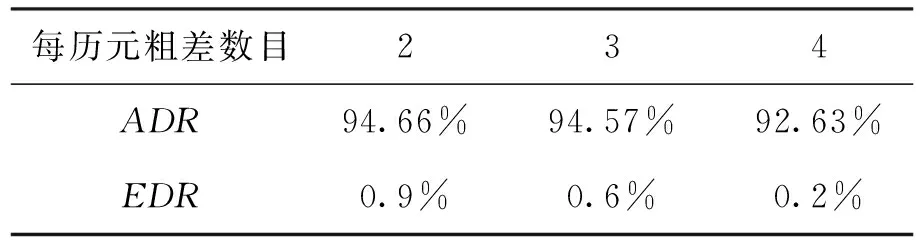
表2 双差法探测多粗差效果
需要指出的是,本部分在粗差探测时,仅仅模拟了30m粗差的探测效果。这是因为在实际中,往往30m粗差已经属于能够影响SPP的较小粗差。方法在探测30m粗差时已经有了较好效果,则在探测更大粗差时效果只可能更好。而由于目前方法DV计算精度的限制,对于30m以下的伪距多粗差探测则无能为力,这有待于进一步研究。
3.2 探测粗差处理
考虑到卫星几何结构对于单点定位影响较大,本文对于探测出的粗差观测值并不直接剔除,而是采用降权方式进行处理。定权仿照huber定权方法,以计算出的双差检验量DV为观测值误差,以理论误差σs,0为单位权中误差。计算公式如下
(12)
考虑到标准伪距单点定位精度有限,可以认为其误差容忍度较大,在定位时,虽然加入了粗差,但仍然有部分历元可以正常定位(结果不偏离SPP正常精度)。因此,在粗差处理时,只处理不能定位的历元。对粗差处理率、粗差影响率(粗差造成SPP失败的比率)、粗差处理有效率(处理后能够进行SPP的比率)进行统计以分析粗差定位处理的效果。在分析时,依次加入30m、40m、50m、60m粗差进行分析。表3统计了粗差探测情况以及处理效果。
粗差量级越大,计算DV时需求的接收机位置精度越低。本文在进行粗差探测时选取能够探测到粗差的最低位置精度,以反映方法探测处理粗差的最差效果。表中可见各个量级粗差进行降权处理的效果较好,处理后有了显著效果(之前不能定位的处理后可以正常定位)比率几乎都在90%之上。这表明,本方法由于能够准确探测多粗差,在处理时,一次降权就能达到优化定位结果的效果。
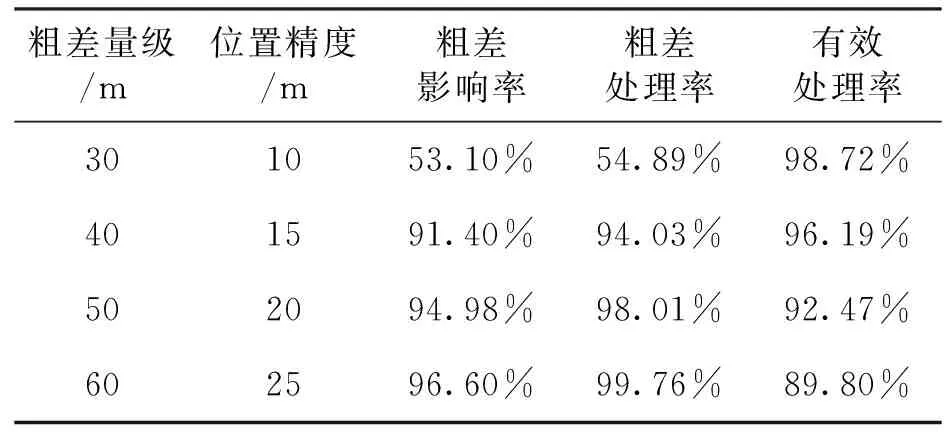
表3 粗差处理情况统计
图5示出了对含30m粗差的观测值做降权处理前后SPP定位结果相对于无粗差SPP的时序图,由于未加入粗差历元定位结果一致,只展示加入了粗差的历元。由图5可知,在加入多粗差后,绝大部分历元无法定位(图5(a)中无值区域都是无法定位的情况),而大粗差的影响则更为显著。在做了降权处理后,之前不能定位的观测值能够重新定位,且定位精度在SPP精度范围之内。这表明方法探测到的粗差是准确的,而且对探测出的粗差做降权处理可以获得较好的定位结果。
表4示出了加入各个量级粗差后降权处理后的精度统计,精度以无粗差定位结果作为基准。可以看出在对粗差观测值做降权处理后,定位结果恢复到正常SPP水平,且处理精度并没有明显受粗差量级的影响。
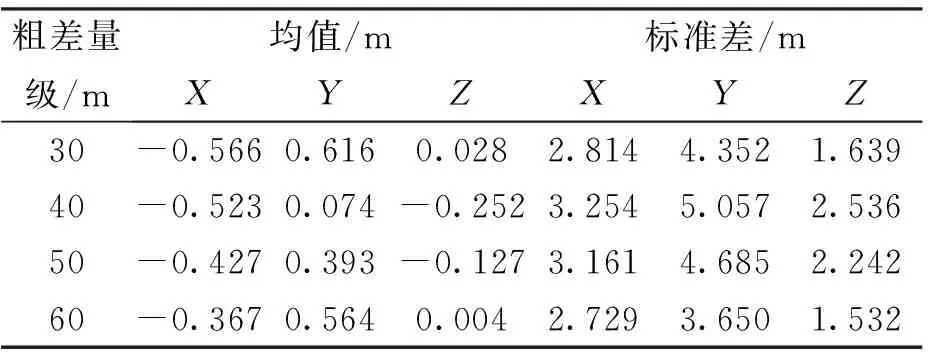
表4 各量级粗差处理精度
4 结束语
针对GNSS伪距多粗差探测的难点,本文提出了一种基于观测值域的验前多粗差探测方法。该方法构建的伪距观测值的粗差检验量相互独立,且具备显著的白噪声特性,具有较好的多粗差探测特性。为了验证方法多粗差探测的性能,使用IGS数据并对其加入模拟粗差进行了实验。实验表明:
1) 方法构建的检验量具有显著的白噪声特性,加入模拟粗差后的检验量具有明显离群特征,这表明方法具备较好的粗差探测能力。
2) 本方法对伪距观测值上大于等于30m的粗差能够较好探测,且探测准确率与粗差个数无关。10m的接收机位置精度即足够探测出30m伪距粗差,更大的粗差则只需要更低精度的位置信息即可。
3) 对探测出的含粗差的观测值进行降权处理后,之前由于多粗差存在而不能定位的在处理后成功定位;之前由于粗差影响而定位精度严重偏离SPP精度的在处理后精度显著改善,定位精度恢复到SPP正常精度。
本文的方法具有较好地多粗差探测能力,能够较好地改善多粗差下的导航定位精度,为GNSS多粗差探测提供了一种新的思路。
[1]仝海波,张国柱.改进M估计的抗多个粗差定位解算方法 [J] .测绘学报,2014,43(4):366-371.
[2]杨玲,沈云中,楼立志. 基于中位参数初值的等价权抗差估计方法[J]. 测绘学报, 2011, 40(1): 28-32.
[3]李国重,李建文,李军正, 等. 基于圆概率误差的RAIM可用性算法研究[J]. 武汉大学学报(信息科学版), 2011, 36(4) :461-466.
[4]秘金钟.GNSS完备性监测方法,技术与应用[D]. 武汉:武汉大学, 2010.
[5]秘金钟,李玮,谷守周. 精密单点定位用户自主式完备性监测算法[J]. 测绘学报, 2011,40(增):63-67.
[6]吴云.GNSS接收机自主完备性监测算法研究 [D]. 武汉大学, 2009.
[7]於宗俦,李明峰. 多维粗差的同时定位与定值[J].武汉测绘科技大学学报, 1996, 21(4) : 323-329.
[8]岑敏仪,卓健成,李志林, 等. 判断观测值粗差能否发现和定位的一种验前方法[J]. 测绘学报, 2003, 32(2): 134-138.
[9]欧吉坤.粗差的拟准检定法(QUAD法)[J].测绘学报,1999,28(1):15-20.
[10]归庆明, 宫轶松,李国重, 等. 基于方差膨胀模型的多个粗差的探测[J].测绘科学,2008(4): 28-29.
[11]陶本藻,姚宜斌,施闯. 基于相关分析的粗差可区分性[J]. 武汉大学学报(信息科学版), 2004, 29(10): 881-884.
[12]施闯,刘经南.基于相关分析的粗差理论[J].武汉测绘科技大学学报,1998,23(1):5-9.
[13]吴云.GNSS粗差检测的“快照”法与“滤波”法的比较研究[J]. 武汉大学学报(信息科学版), 2010, 35(6):649-652.