隐匿切口法与传统通道法机器人辅助腹腔镜小儿肾盂成形术的初步比较
2018-04-03刘宇静刘德鸿周辉霞马立飞曹华林周晓光陶天郝雪梅
刘宇静 刘德鸿 周辉霞 马立飞 曹华林 周晓光 陶天 郝雪梅
1中国人民解放军陆军总医院医工科 100700 北京 2中国人民解放军陆军总医院附属八一儿童医院儿童泌尿外科 3中国人民解放军陆军总医院麻醉科
小儿肾积水是小儿泌尿外科的常见疾病之一,其中UPJO占其病因的70%以上[1]。随着腹腔镜肾盂成形术的开展和操作经验的积累,儿童腹腔镜肾盂成形术与开放手术一样是安全、有效的,但因吻合操作难度大,学习曲线长,在婴幼儿的肾积水手术中还没有广泛应用[2]。机器人辅助腹腔镜具有三维视野、放大的手术区域、灵巧的机械手、相对少的出血量、手震颤的过滤及减少外科医生疲劳等优点[3]。借助机器人腹腔镜放大的三维视角和相对容易缝合的优势,很多小儿泌尿外科手术能够用机器人开展[4, 5]。然而,机器人的操作通道比传统腹腔镜的大,理论上美容效果不如传统腹腔镜手术,且机器人操作器械旋转弯曲需要相对较大的空间,这很大程度上限制了机器人辅助腹腔镜在婴幼儿手术中的应用。近年来,采用隐性切口法的机器人辅助腹腔镜手术开展起来,与传统通道机器人手术不同,隐性切口法的通道位置在Pfannenstiel皱褶上,美容效果更满意[6, 7]。我们通过对传统机器人操作通道的切口位置进行改良,既增加了手术操作空间,又改善了美容效果,将机器人的手术通道切口隐藏在脐部和Pfannenstiel皱褶上,术后可以达到无可视的瘢痕。现将我们进行隐匿切口法与传统通道法机器人辅助腹腔镜肾盂成形术的两者进行比较,报告如下。
1 资料与方法
1.1 临床资料
回顾性分析中国人民解放军陆军总医院附属八一儿童医院泌尿外科2017年3月21日~2017年6月30日共治疗37例小儿单侧肾积水患儿的临床资料,其中男30例,女7例,左侧26例,右侧11例。10例患者因患侧腰痛就诊,其余27例均为产前检查发现肾积水。依据手术通道的不同分为两组:采用传统通道法机器人辅助肾盂成形术15例(传统通道法),年龄52 d~8岁,平均(11.2±2.5)个月;采用隐匿切口法的机器人辅助肾盂成形术22例(传统通道法),年龄8 d~8岁,平均(10.8±2.3)个月。两组的一般资料和临床表现详见表1。术前所有患者均行泌尿系B超、MRU及肾核素扫描等检查明确诊断为UPJO,手术适应证为:①肾盂前后径>3.0 cm;②肾盂前后径>2.0 cm伴肾盏扩张;③肾盂、肾盏扩张明显,分肾功能低于40%且大于10%;④肾盂、肾盏扩张呈进行性增加;⑤有腹痛、泌尿系感染等症状[8]。
表1 两组患者的一般资料和临床表现
1.2 手术方法
气管内插管全身麻醉,清洁灌肠、留置尿管及胃管,患儿取健侧卧位,患侧垫高50~ 70°,下垫温毯,受压部位均用棉垫填塞保护,患儿尽可能靠近床沿,宽胶布固定。传统通道通道建立如下[7]:经脐置入一普通腹腔镜5 mm Trocar,建立人工气腹,维持气腹压力0.931~1.33 kPa(7~10 mm Hg),在目镜直视下经脐置入一机器人目镜孔(8.5 mm),在脐正中上方8 cm建立机器人2号臂操作通道(5 mm),患侧脐下8 cm外侧建立机器人1号臂操作通道(5 mm),于2号臂操作通道与目镜脐连线中点外侧的锁骨中线处置入一3 mm 辅助Trocar(图1A)。隐匿切口法建立如下:经脐置入一普通腹腔镜5 mm Trocar,建立人工气腹,维持气腹压力0.931~1.33 kPa,在目镜直视下分别于脐部、脐下正中Pfannenstiel线上建立机器人镜头孔(8.5 mm)与1号臂操作孔(5 mm),在脐上正中1号臂对称点建立机器人2号臂操作孔(5 mm),于1号臂健侧外3~4 cm的Pfannenstiel线上置入3 mm的辅助Trocar(图1B)。2-0慕丝线固定各操作通道,引导机器入床旁机械臂系统进入手术区,将各机械臂与Trocar对接。
腔内操作基本参见普通腹腔镜肾盂成形术,右侧采用结肠旁途径,左侧根据术中具体情况采用肠系膜途径或结肠旁途径[6]。结肠旁途径:超声刀切开结肠外侧腹膜,将结肠向内侧游离。在性腺血管的外侧切开Gerota筋膜和肾周脂肪,在肾下极充分游离扩张的肾盂和输尿管上段,弧形裁减扩张的肾盂,切除狭窄段输尿管,纵行剖开输尿管上端外侧约2 cm,从腹壁穿一牵引线将裁减后的肾盂上角悬吊牵引;以肾盏轴辨认肾轴方法,在肾轴连线的最低点用6-0可吸收线将肾盂瓣下角与输尿管劈开处最低位缝合在一起;在距最低点吻合口1.5 cm处作一牵引线,采用非钳夹式缝合技术连续缝合吻合口后壁,经吻合口顺行放置F4.7双J管,然后采用非钳夹式缝合技术连续缝合吻合口前壁及多余的肾盂瓣开口。生理盐水冲洗创面后,5-0可吸收线关闭侧腹膜,直视下从脐下切口置入引流管,置于陶氏腔,缝合腹膜,医用胶粘合切口皮缘。
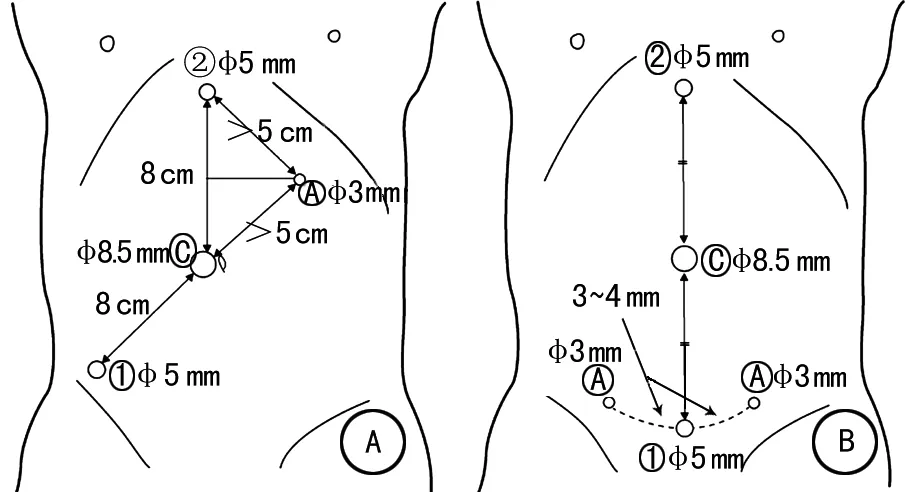
图1A:传统通道法通道位置示意图;图1B:隐匿切口法通道位置示意图。C:机器人目镜孔通道;①:机器人1号臂操作通道;②:机器人2号臂操作通道;A:辅助孔通道。
图1两种术式Trocar的置放示意图
左侧肠系膜途径:于肠系膜下静脉下缘、降结肠内侧缘、精索静脉外侧缘、结肠左动脉上缘区,剪开肠系膜,暴露左侧肾盂及输尿管上段。同样可使用丝线悬吊肾盂上极及降结肠内侧缘,以充分暴露术野。裁剪和缝合肾盂输尿管方法同结肠旁途径。
术后留置腹腔引流管于陶氏腔,适当应用抗生素预防感染,术后6周在膀胱镜下拔除双J管。术后并发症采用Clavien分类标准进行分级[9]。
1.3 观察项目
记录患儿手术时间、术中估计出血量、术中并发症、留置引流管时间、术后恢复饮食时间、术后住院时间、术后并发症及手术成功率等。
1.4 统计学方法

2 结果
采用隐匿切口法与传统通道法机器人辅助腹腔镜肾盂成形术的47例患儿手术均获得成功,无中转传统腹腔镜手术和开放手术,无术中并发症。传统通道法平均手术时间112.0 min(90~270 min)、术中平均出血量10.0 ml(10~20 ml)、平均进食时间1.67 d(1~2 d)、平均引流管拔除时间1.80 d(1~5 d)、术后平均住院时间6.86 d(5~10 d)。术后并发症Clavien Ⅰ~Ⅱ级发生率40.0%(术后发热4例,静脉药物退烧后好转;吻合口漏尿2例,延迟拔腹腔引流管后好转);隐匿切口法平均手术时间106.5 min(85~226 min)、术中平均出血量9.5 ml(5~15 ml)、平均进食时间1.59 d(1~2 d)、平均引流管拔除时间1.68 d(1~3 d)、术后平均住院时间6.50 d(4~10 d)。术后并发症Clavien Ⅰ~Ⅱ级发生率27.3%(术后发热5例,静脉药物退烧后好转,吻合口漏尿1例,延迟拔腹腔引流管后好转)。两组均无Ⅲ、Ⅳ级并发症。两组术后3个月复查超声肾盂前后径明显减小。无吻合口狭窄、再次梗阻、泌尿系感染切口感染等并发症。两组的手术数据和术后结果详见表2。两组术后6个月瘢痕见图2,隐匿切口法的瘢痕掩藏于Pfannenstiel皱褶上,体表无可视瘢痕。

表2 两组患者的手术数据和术后结果的比较

图2A:传统通道法术后6个月伤口;图2B:隐匿切口法术后6个月伤口。
图2两种方法术后6个月时的伤口
3 讨论
腹腔镜下肾盂成形术已经是小儿肾积水治疗的主要术式之一,手术成功率与开放性手术相当。然而,腹腔镜下肾盂成形术对腔镜下的缝合技术要求高,术者的学习曲线相对较长[10,11]。由于儿童的后腹腔及腹腔空间较狭小,因此,婴幼儿的腹腔镜下肾盂成形术的学习曲线更长。达芬奇机器人手术系统突破了传统腹腔镜技术的局限性,可提供较腹腔镜手术更精准的操作,将手术精度与难度提升到了新的高度,使更复杂、更困难以及年龄更小的患儿的外科手术成为可能。虽然小儿的腹腔空间相对较小,但是机器人辅助小儿肾盂成形术的安全性及有效性得到证实,其手术成功率与传统腹腔镜手术和开放手术相当[12~14]。目前,国外机器人辅助小儿肾盂成形术的最小患儿出生年龄1个月[15],香港及内地分别于2008年及2014年开展传统通道法机器人辅助小儿肾盂成形术,证实了机器人辅助小儿肾盂成形术对3~4岁以上的患儿是安全、有效的[16, 17]。由于小儿腹膜后的操作空间较成人更加局限,绝大多数机器人辅助腹腔镜小儿肾盂成形术采用经腹腔途径[5, 18, 19]。根据以往腹腔镜的经验并参考相关文献,我们对37例患儿全部采用经腹腔途径的机器人辅助腹腔镜小儿肾盂成形术,其中传统通道法与隐匿切口法分别为15例、22例,手术全部取得成功,无中转开放病例,无术中及术后严重并发症发生,其中最小患儿仅出生8 d,突破了机器人腹腔镜手术的年龄限制。尽管本研究两组的例数较少,尚不具备进行大样本对比的条件,但可以从术后随访近6个月的初步结果看两种方法的术后效果和术后合并症情况均比较理想。从估计术中出血量、引流管拔除时间、进食时间及住院天数来看,传统通道法及隐匿切口法较以往的腹腔镜肾盂成形术相比没有明显差异。从手术时间上看,传统通道法及隐匿切口法随着术者技术熟练程度的提高,手术时间基本与腹腔镜手术相仿,甚至会缩短。另外,小儿特别是婴幼儿的腹腔相对较小,减少术中肠胀气不仅可减少对心肺功能的影响,而且可以在机器人辅助肾盂成形术中保持良好的操作空间,提高手术操作的精确度,增加手术成功率。我们认为在术前适当镇静、麻醉平稳诱导可减少患儿吞入大量气体,术前纠正水电解质紊乱、禁食时间稍长、等渗温盐水清洁灌肠、胃肠减压及留置肛管可减少术中肠胀气。
在本研究中,传统通道法的目镜离操作靶器官距离较近,放大倍数过大亦不利于对手术视野的整体观察,侧卧位内脏器官移位亦会影响操作,有时需要增加辅助通道才能完成手术。另外,相较于腹腔镜,传统通道法机器人最少留下两个可视瘢痕[7]。为进一步便利操作,改善术后美容效果,Gargollo[6]于2011年首先报道将隐蔽切口内镜术应用于机器人辅助腹腔镜手术中,2号器械臂位于脐部,目镜和1号臂操作通道均位于Pfannenstiel皱褶上,其中目镜在脐下正中的Pfannenstiel皱褶上,1号臂在目镜8 cm处的患侧Pfannenstiel皱褶上。这种分散的手术操作通道避免了手术器械冲突,手术瘢痕均隐藏于肚脐和Pfannenstiel线上。对于体型偏小的儿童,如按上述方法建立通道,可能会出现1号机器臂和目镜、目镜和辅助孔产生冲突。我们在传统通道法基础上将该隐蔽切口法进行了改良,目镜臂置于脐正中处,1号臂建立于脐正中下方的Pfannenstiel皱褶上,2号臂建立于脐正中上方1号臂的对称点上,将辅助孔建在1号臂外侧3~4 cm的Pfannenstiel皱褶上,这样有效的增加了各通道间的距离,避免辅助孔与目镜及目镜与1号机器臂间相互冲突,增加了各操作通道的灵活性,充分发挥辅助孔与机器人器械臂的优势,增加了目镜与目标靶器官的距离,有效增加了手术操作空间,减少肠管及肠系膜对镜头的干扰,所以其在一定程度上缩短了手术时间,同时该方法保留了隐匿切口法的美容效果。本研究中,尽管隐藏切口法增加了操作空间,手术时间也短于传统通道法,但可能因为样本量少,因此统计上没有差别。与传统通道法相比,采用隐匿切口法的22例患儿的估计术中出血量、引流管拔除时间、进食时间、住院天数及手术成功率没有差异,而在手术后6个月伤口美容效果更好。尽管有文献报道Pfannenstiel皱褶切口可能导致髂腹下神经、髂腹股沟神经的损伤,出现感觉异常等问题[20],但我们Trocar通道的建立均在直视下进行,可以尽量避免损伤神经血管,另外本组手术患儿年龄偏小,随访时间尚短,目前还没发现Pfannenstiel皱褶切口导致感觉异常等问题。
本研究的不足在于样本量不多、随访时间半年,传统通道法与隐匿切口法的手术效果尚需长期随访和前瞻性随机对照试验研究来证实。与国内外机器人辅助肾盂成形术相比,本研究患儿年龄偏小,尽管机器人辅助手术可以模拟开放手术,但对于腔镜手术经验较少,机器人辅助婴幼儿肾盂成形术还是需要一定的学习曲线。另外,由于机器人手术系统独有的优势,使得手术具有良好的可操作性,并具有患者创伤小。但机器人也存在操作时间长、费用高、缺乏触觉反馈等缺点。
综上所述,传统通道法与隐匿切口法机器人辅助腹腔镜肾盂成形术治疗婴幼儿肾积水安全可行,术中和术后并发症少。隐匿切口法机器人辅助腹腔镜肾盂成形术具有操作空间大、美容效果好等优点,推荐在机器人辅助腹腔镜小儿肾盂成形术中使用。
[参考文献]
[1] Peters CA, Schlussel RN, Retik AB. Pediatric laparoscopic dismembered pyeloplasty. J Urol, 1995,153(6):1962-1965.
[2] Mei H, Pu J, Yang C, et al. Laparoscopic versus open pyeloplasty for ureteropelvic junction obstruction in children: a systematic review and meta-analysis. J Endourol, 2011,25(5):727-736.
[3] 张旭,丁强.机器人技术的沿革与展望.微创泌尿外科杂志,2013,2(4):225-226.
[4] Casale P, Kojima Y. Robotic-assisted laparoscopic surgery in pediatric urology: an update. Scand J Surg, 2009,98(2):110-119.
[5] Cundy TP, Shetty K, Clark J, et al. The first decade of robotic surgery in children. J Pediatr Surg, 2013,48(4):858-865.
[6] Gargollo PC. Hidden incision endoscopic surgery: description of technique, parental satisfaction and applications. J Urol, 2011,185(4):1425-1431.
[7] Hong YH, Defoor WJ, Reddy PP, et al. Hidden incision endoscopic surgery (HIdES) trocar placement for pediatric robotic pyeloplasty: comparison to traditional port placement. J Robot Surg, 2017, Mar,14, doi: 10.1007/s11701-017-0684-2, https://link.springer.com/article/10.1007%2Fs11701-017-0684-2.
[8] Liu DH, Zhou HX, Ma LF, et al. Comparison of laparoscopic approaches for dismembered pyeloplasty in children with ureteropelvic junction obstruction: critical analysis of 11-year experiences in a single surgeon. Urology, 2017,101(SI):50-55.
[9] Daniel Dindo ND, Pierre-Alain Clavien EA. Classification of surgical complications: a new proposal with evaluation in a cohort of 6336 patients and results of a survey. Ann Surg, 2004,240(2):205-213.
[10] Palese MA, Munver R, Phillips CK, et al. Robot-assisted laparoscopic dismembered pyeloplasty. JSLS, 2005,9:252-257.
[11] Casale P. Robotic pyeloplasty in the pediatric population. Curr Urol Rep, 2009,10(1):55-59.
[12] Gettman MT, Peschel R, Neururer R, et al. A comparison of laparoscopic pyeloplasty performed with the daVinci robotic system versus standard laparoscopic techniques: initial clinical results. Eur Urol, 2002,42(5):453-458.
[13] Yee DS, Shanberg AM, Duel BP, et al. Initial comparison of robotic-assisted laparoscopic versus open pyeloplasty in children. Urology, 2006,67(3):599-602.
[14] Lee RS, Retik AB, Borer JG, et al. Pediatric robot assisted laparoscopic dismembered pyeloplasty: comparison with a cohort of open surgery. J Urol, 2006,175(2):683-687.
[15] Cundy TP, Gattas NE, White AD. Learning curve evaluation using cumulative summation analysis-a clinical example of pediatric robot-assisted laparoscopic pyeloplasty. J Pediatr Surg, 2015,50(8):1368-1373.
[16] 黄格元,蓝传亮,刘雪来,等.达芬奇机器人在小儿外科手术中的应用(附20例报告).中国微创外科杂志,2013,13(1):4-8.
[17] 吕逸清,谢华,黄轶晨,等.机器人辅助腹腔镜下儿童肾盂成形术的初步探讨.中华泌尿外科杂志,2015,36(10):721-725.
[18] Braga LH, Pace K, Demaria J, et al. Systematic review and Meta-Analysis of Robotic-Assisted versus conventional laparoscopic pyeloplasty for patients with ureteropelvic junction obstruction: effect on operative time, length of hospital stay, postoperative complications, and success rate. Eur Urol, 2009,56(5):848-857.
[19] Minnillo B, Cruz JA, Sayao RH, et al. Long-term experience and outcomes of robotic assisted laparoscopic pyeloplasty in children and young adults. J Urol, 2011,185(4):1455-1460.
[20] Luijendijk RW, Jeekel J, Storm RK, et al. The low transverse Pfannenstiel incision and the prevalence of incisional hernia and nerve entrapment. Ann Surg, 1997,225(4):365-369.
