混合型主动悬架H2/H∞控制研究
2018-03-29卜祥风谢友浩
卜祥风,谢友浩
(1.滁州学院 机械与汽车工程学院,滁州 239000;2.安徽猎豹汽车有限公司,滁州 239000)
0 引言
电磁作动器是一种主动动力装置,具有无摩擦、动态响应快、输出力大、适用频带宽等优点,被广泛应用在振动系统的主动控制中。 池维超[1]设计了一种应用于大型航天器整星隔振系统的电磁作动器,采用鲁棒控制理论研究了电磁作动器在整星主被动隔振平台中的应用效果,并通过实验验证了电磁作动器在整星主动隔振系统应用的可行性。陈修祥等[2]基于双向电磁作动器设计了四自由度并联式航海船舶多维减振机构,应用模糊PID算法确定电磁作动器的电流大小和方向,在样机上的试验结果表明船舶多维减振机构具有良好的低频减振效果。
汽车悬架作为经典的振动系统,电磁作动器在悬架主动振动控制方面也有广泛的应用。来飞[3]研究了一种圆筒形电磁直线作动器,安装在车身与车轮之间,形成主动悬架系统。仿真结果表明在外环最优控制和内环矢量控制策略下,路面激励为2Hz时,悬架减振效果明显,而当路面激励为10Hz时,减振效果较差。2008年,陈昆山、胡思明、戴建军[4,5]首批提出将电磁反力作动器仅安装在车轮上,而不与车身相接触,形成一种混合型主动悬架。由于电磁作动器的反作用力仅作用在车轮上,所以混合型主动悬架具有结构简单、响应快的优点,并且具有较好的失效稳定性。胡思明使用的PID经典控制算法使混合型主动悬架在高频段取得了良好得减振效果,但低频段几乎没有改善。本文采用H2/H∞算法,对混合型悬架进行多目标控制,使用LMI方法设计系统的H2/H∞控制器,使混合型主动悬架在低频和高频段均有较好的减振效果。
1 混合型主动悬架建模
如图1所示为电磁反力作动器的力学简图,其中m是质量块,k是弹簧刚度,c是阻尼器阻尼系数,u是电磁驱动力。当电磁线圈通电时产生电磁驱动力u驱动质量块m受迫振动,从而电磁作动器整体对外产生一个反力Ft。
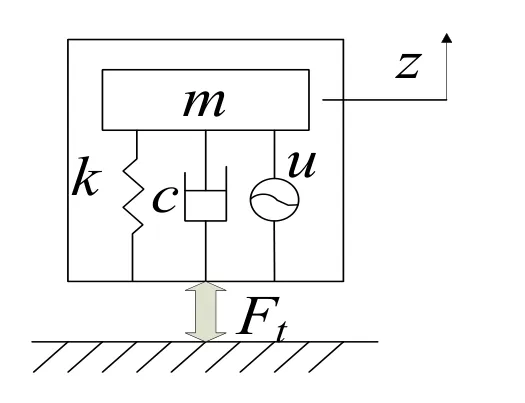
图1 电磁作动器力学简图
把图1的电磁反力作动器安装到普通被动悬架的车轮环节,就形成了如图2所示的混合型主动悬架。其中m1表示非簧载质量,m2表示簧载质量,k1是轮胎等效刚度,k2是悬架刚度,c2是悬架阻尼。q、x1、x2、x3分别代表路面、车轮、车身、电磁作动器质量块的位移。

图2 混合型主动悬架力学简图
电磁作动器对外的作用力Ft仅作用在非簧载质量m1上,作为主动控制力。所以只要控制电磁作动器电流的大小和方向就可以产生相应的主动控制力,调节整个振动系统的振动。
由牛顿第二定律得出混合型主动悬架运动微分方程:

由式(2)和式(3)可得:


2 H2/H∞控制器设计
2.1 H2/H∞指标确定
H∞指标定义为有限能量的干扰输入到输出闭环传递函数的H∞范数不大于给定的干扰抑制度,H2指标定义为单位强度白噪声输入到输出闭环传递函数的H2范数最小化。
混合型主动悬架H2/H∞控制要兼顾车辆的乘坐舒适性、行车安全性和能量消耗,即车身振动加速度要尽量小,悬架动行程和轮胎动载荷不能超过既定的范围,主动控制力不能超出作动器作用力的上限,具体约束如下:
1)实际行车中要求轮胎不能跳离地面,一旦轮胎跳离地面轮胎将失去附着力,容易引起侧滑等危险。约束轮胎的动载荷始终小于其静载荷可以保证轮胎良好的触地性。即有:
3)混合型主动悬架的主动控制力由电磁反力作动器产生,电磁反力作动器的能量来源于车载蓄电池,所以要求主动控制力不能超过电磁反力作动器作动力的上限,即有:
显然,1)、2)、3)项应定义为/H∞指标,4)项应定义为H2指标,测量输出y选取较容易测量的车身振动加速度。由上述指标的定义归一化输出:

由此,混合型悬架H2/H∞控制问题可用图3表示。

图3 混合型主动悬架H2/H∞控制模型
w是外界输入,u是主动控制力,y是测量输出,Z2是H2指标输出,Z∞是H∞指标输出,K(s)是待求解的控制器。
系统的状态空间为:
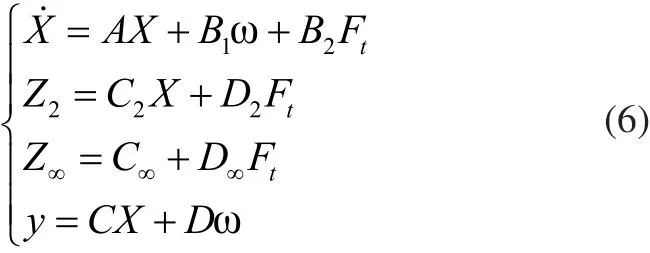
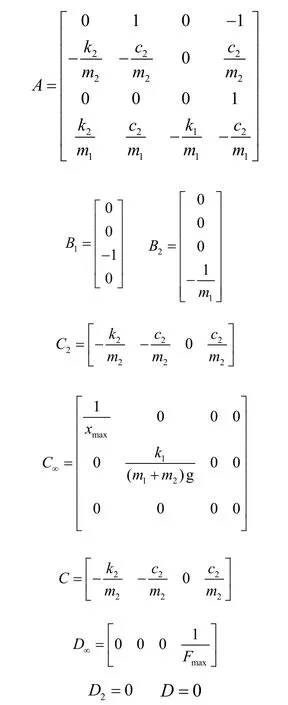
其中xmax是悬架最大动行程,Fmax是作动器作动力上限值。
2.2 H2/H∞控制器求解
H2/H∞输出反馈控制器有如下形式:

相应闭环系统具有如下形式:
根据文献[6]介绍的变量替换法,引入变量替换矩阵Ar、Br、Cr、Dr和矩阵X、Y、Q,这样H2/H∞混合控制问题可以通过求解如下的凸优化问题来解决:

其中:

基于LMI的H2/H∞输出反馈控制求解步骤如下:
1)用mincx函数求解不等式系统(9)的可行解Ar、Br、Cr、Dr、X、Y、Q。
2)对矩阵I-XY进行奇异值分解,得到满秩矩阵M和N。
3)控制器参数矩阵求解如下:

3 实例仿真分析
仿真选用某车型1/4悬架,m1=24kg,m2=240kg,k1=16kN/m,k2=159kN/m,c2=1.1kN.s/m,路面输入由文献[7]介绍的模型给出:

上式中q(t)为路面垂向位移输入、f0为路面输入下截止频率、G0为路面不平度系数、U0为汽车行驶速度、ω(t)为白噪声。
选取不同的干扰抑制度γ,分别求解相应的H2/H∞输出反馈控制问题,可以分析混合型悬架H2性能和H∞性能之间的竞争关系。一般先求取最优H∞指标,得到最小的干扰抑制度γ,然后逐渐增大γ,求取使得系统综合性能较好的输出反馈控制器。这里取γ=35。
3.1 频域分析
作为评价行驶平顺性的关键指标,车身竖向振动加速度的幅频特性分析更加重要。
图4~图6给出了混合型主动悬架和被动悬架的车身振动加速度、悬架动挠度、轮胎动载荷三个指标的幅频特性曲线对比。

图4 车身加速度幅频特性对比
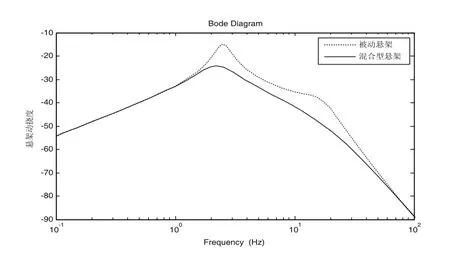
图5 悬架动挠度对比
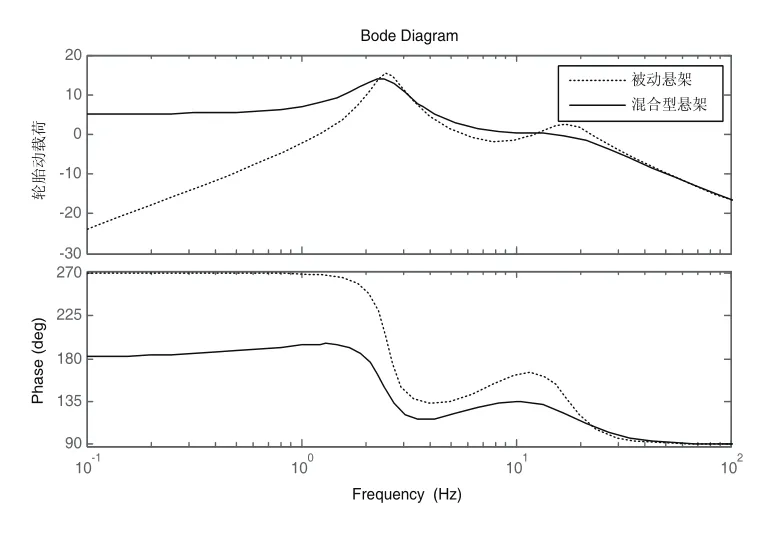
图6 轮胎动载荷对比
图4表明,混合型主动悬架的车身振动加速度幅值在人体最敏感的低频带有显著的降低,在被动悬架第二个共振点处幅值亦明显减小,体现出H2/H∞输出反馈控制的混合型主动悬架良好地改善了行驶平顺性。
图5显示,悬架动挠度的幅值改善趋势与车身振动加速度比较类似,改善幅度略小。而从图6可以看出,混合型主动悬架的轮胎动载荷幅值在低频段有明显的升高,表面上看轮胎动载荷是恶化的。但结合相频特性曲线可以发现,轮胎动载荷恶化的频带内,其相位角与路面输入相差1800,这说明实际行车中路面输入与轮胎动载荷方向刚好相反,当路面输入向上时,轮胎动载荷向下,实际上轮胎是紧贴地面的,行车安全系并未恶化。
3.2 时域分析
在Simulink中建立混合型主动悬架H2/H∞输出反馈控制模型,得到时速30km/h下,混合型主动悬架与传动被动悬架在车身振动加速度、悬架动挠度以及轮胎动载荷三个方面的时域对比,如图7~图9所示。

图7 车身加速度对比
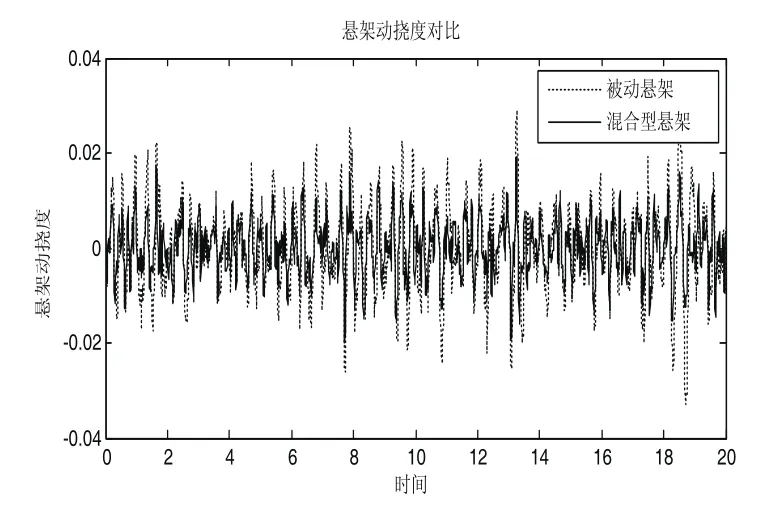
图8 悬架动挠度对比

图9 轮胎动载荷对比
表1给出了两种悬架在三个评价指标下的均方根值,为了便于横向比较,还给出了两组不同干扰抑制度下的时域仿真结果。分析表1,在仿真所设参数下,混合型主动悬架相比于被动悬架,车身振动加速度和悬架动挠度改善显著,分别减小25.2%和15.68%。轮胎动载荷减小1.64%,有轻微的改善。可见,混合型主动悬架的车辆行驶平顺性得到了较大改善,而行车安全性也有轻微的加强。当干扰抑制度γ改变时,仿真结果亦有相应变化。如γ减小,H∞约束变强悬架动挠度和轮胎动载荷变小,相应的H2约束变弱,主要表现为车身加速度变大。因此只要调节干扰抑制度γ这一个参数值,优化起来比较方便。

表1 悬架性能均方根值对比
4 结论
混合型主动悬架仅在被动悬架车轮环节加装电磁反力作动器形成,结构简单,并且比传动被动悬架有更好地行驶平顺性和操纵稳定性。所采用的的H2/H∞控制策略在混合型主动悬架上产生了理想的控制效果,所设计的混合型主动悬架系统控制方案是有效的,可行的。
[1]池维超.基于电磁作动器的整星主被动一体化隔振技术研究[D].哈尔滨工业大学,2015.
[2]来飞,黄超群.采用电磁作动器的车辆主动悬架的研究[J].汽车工程,2012,(02):170-174.
[3]陈昆山,戴建军,胡思明.基于功率流方法电磁反力混合型主动悬架研究[J].噪声与振动控制,2008,(05):21-24.
[4]陈昆山,胡思明,戴建军.基于作动力反馈控制的电磁反力式混合型主动悬架[J].噪声与振动控制,2008,(04):70-74.
[5]陈修祥,马履中,朱伟.航海船舶多维振动半主动控制研究[J].仪器仪表学报,2007,(07):1250-1254.
[6]俞立.鲁棒控制一线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.55-63.
[7]陈盟,龙海洋,琚立颖,李耀刚.随机路面时域模型的建模与仿真[J].机械工程与自动化,2017,(02):40-41.