翻醅机智能控制系统设计
2018-03-29崔艳海潘天红
崔艳海,舒 杰,潘天红
(江苏大学 电气信息工程学院 自动化系,镇江 212013)
0 引言
随着我国科技水平的不断提高,只有将智能控制合理运用到各行各业中才真正能够体现科学的进步。本项研究的翻醅机智能控制系统使用了多种传感模块和数据处理模块,可以实时的对发酵过程中翻醅机的位置进行数据采集和分析。使用2.4G无线通信模块和GPRS模块将所测的数据发送给远程终端,系统对所得到的数据经过分析,自动调整翻醅工艺参数,经STM32控制器处理后发出命令给驱动电机,从而控制机械臂动作,使得翻醅朝着智能化方向发展。
1 系统总体方案设计
本项目主要是基于STM32F103ZET6单片机最小系统为控制核心构成的翻醅机智能控制系统,系统的总体设计框图如图1所示。整个控制系统分为:1)微控制器。系统选用STM32系列高性能微控制器系统的核心控制模块;2)工业显示屏模块。主要用于实现人机之间交互功能;3)接近开关传感器模块。主要用于测量目标的实时位置;4)电机驱动模块。该模块用于驱动电机旋转;5)2.4G无线通讯电路。该模块用于将测得的数据发送到移动设备或者嵌入式系统;6)GPRS模块。该模块将数据发送给手机端和服务器端。
系统运行时,STM32单片机运行程序后产生PWM波,经过光电隔离后将脉冲送到电机驱动电路中,驱动电机转动,接近开关判断电机是否到达极限位置。同时检测当前的转速并反馈给单片机系统,单片机通过PID算法智能调节PWM脉冲占空比,实现电机的平滑稳定的调速。根据工业串口屏的命令来控制电机运作,利用传感器反馈矫正控制,实现翻醅过程自动化操作[1]。
2 系统硬件电路
智能控制系统的硬件部分由STM32F103ZET6单片机最小系统、电源模块、电机驱动模块、接近开关模块、2.4G通讯模块、GPRS模块以及工业串口屏模块构成。
2.1 STM32最小系统
STM32F103ZET6单片机是整个翻醅机智能控制系统的核心部分。这款单片机是ST公司生产的32位的增强型系列单片机,内核采用Cortex-M3架构,其资源十分丰富:64KB SRAM、512KB FLASH、2个基本定时器、2个DMA控制器(共12个通道)、3个SPI、5个串口、3个12位ADC、1个12位DAC以及112个通用IO口,完全能够满足实验需求。其特点是高性能、低成本、低功耗[2]。主要包括电源电路、时钟电路、复位电路、启动电路和程序下载电路。

图1 系统总体设计框图
2.2 电源模块
为满足控制系统各模块对不同电压等级电源的需求,本项目设计了三种电压转换电路。电源分配示意图如图2所示。在图2中,采用锂电池作为动力源,采用SYSY20-24S12芯片输出12V电压供给工业串口屏使用;采用LM2576-5V芯片输出5V电压供给电机驱动模块使用;由LM2576-3.3V芯片将12V电压转换为3.3V,作为主控制器STM32的供电电源。在设计电源电路时,还要考虑提供电源转换效率,抗干扰等因素等。
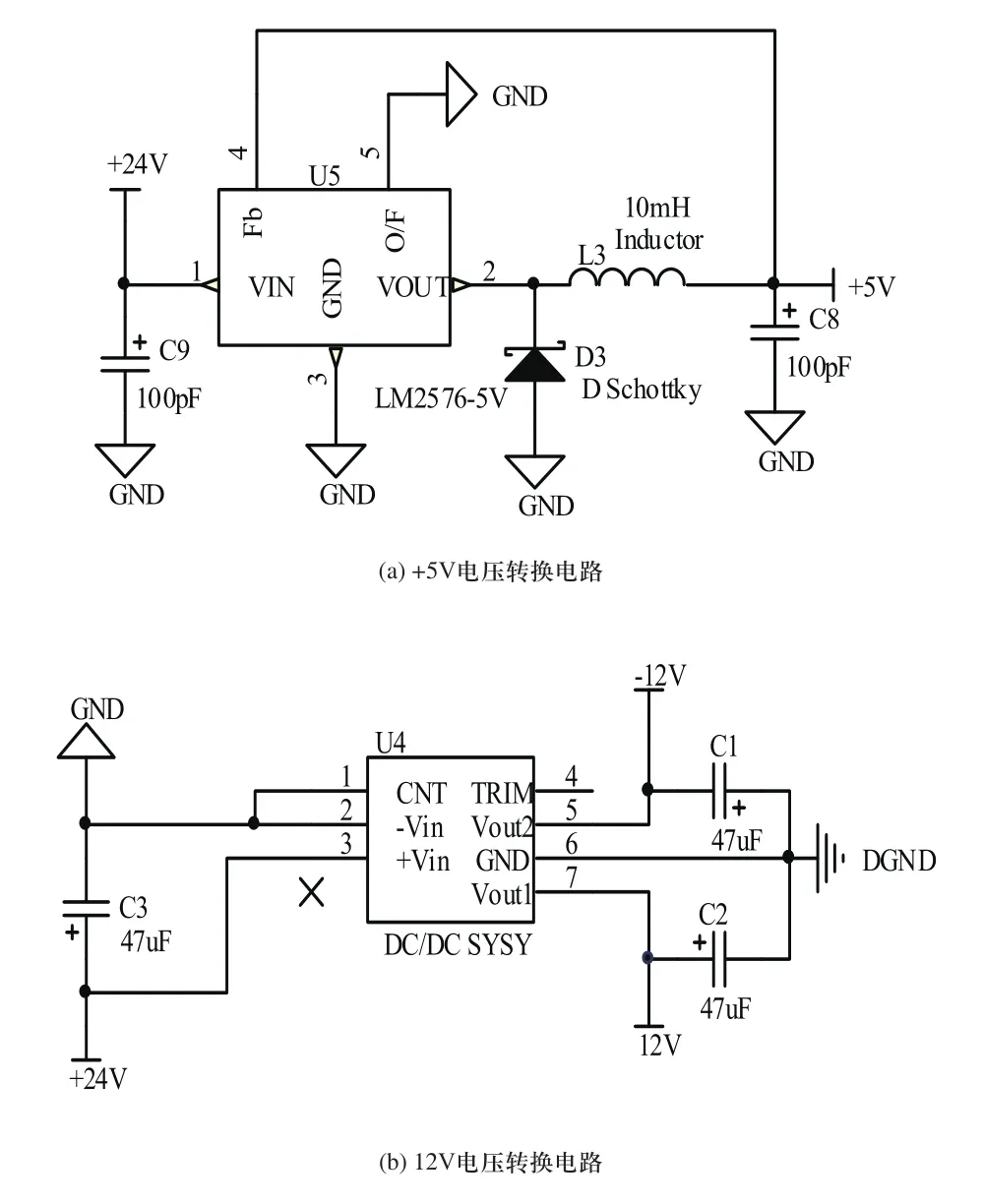
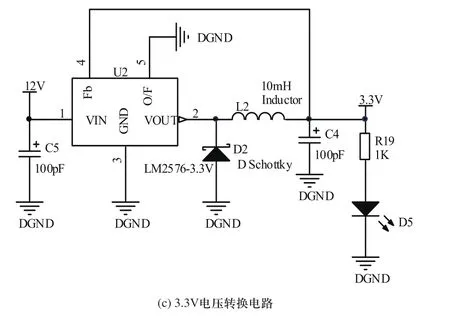
图2 电源模块电路
2.3 电机驱动模块
本次翻醅机系统共有6个电机,采用两种控制器,一种是BLD-750直流无刷电机驱动器,还有一种是YPC系列大功率无刷电机控制器。无刷直流电机既具有交流电机的简单、运行可靠、维护方便等优点,又具有直流电机运行效率高、调速性能好的优点,而且由于不受机械换向限制,易于做到大容量、高转速。因此,本次设计选用无刷直流电机来作为动力装置,满足设计的性能需求[3]。
BLD-750直流无刷电机驱动器作为电机的驱动模块,这款驱动器具备PID电流调节,能够利用直流无刷电机的霍尔信号,经过放大频率后进行速度闭环调节,其与单片机的连线电路如图3(a)所示。
YPC系列大功率无刷电机驱动器,驱动电机的正转反转和停止功能必须通过黑线、灰线和棕线的连接来控制,其与单片机的连线电路如图3(b)所示。
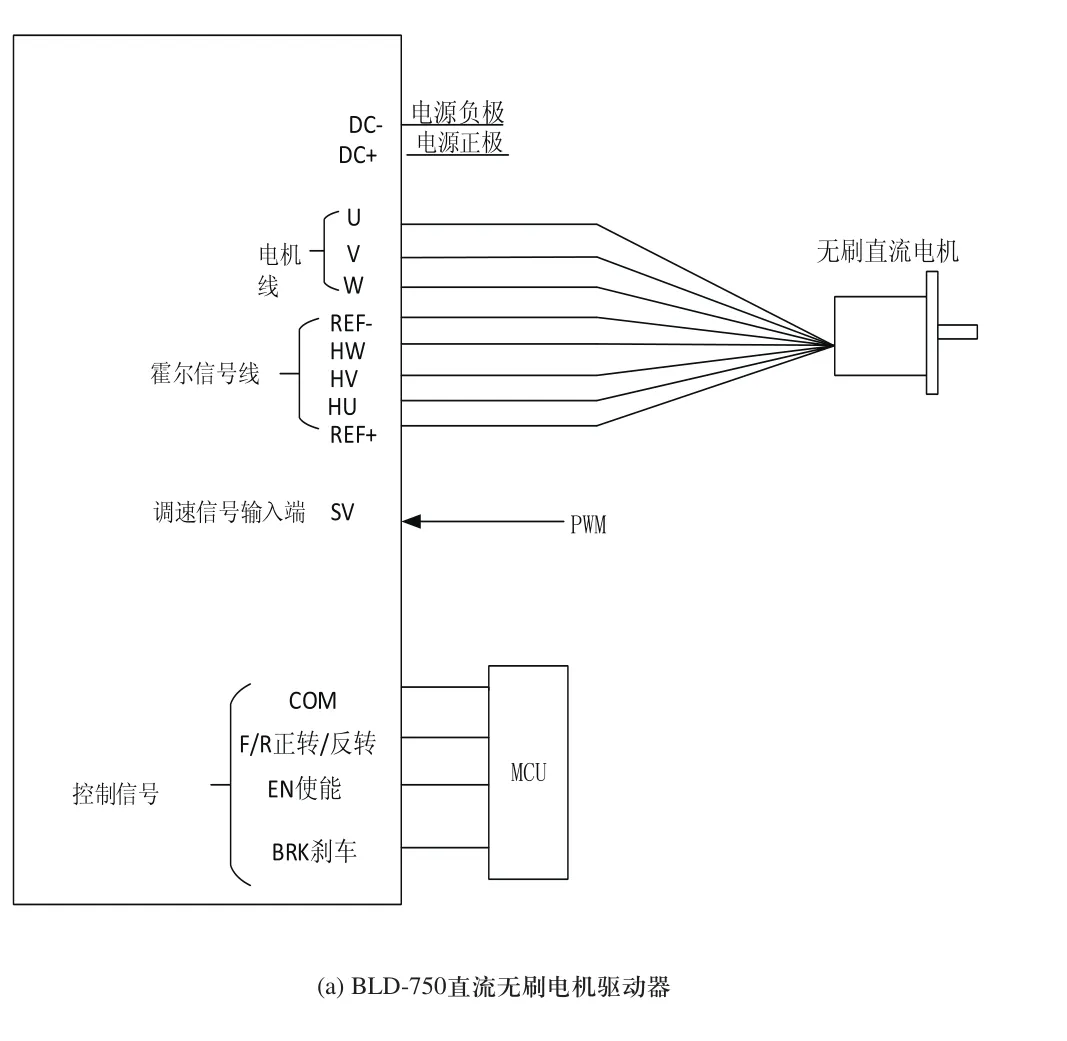
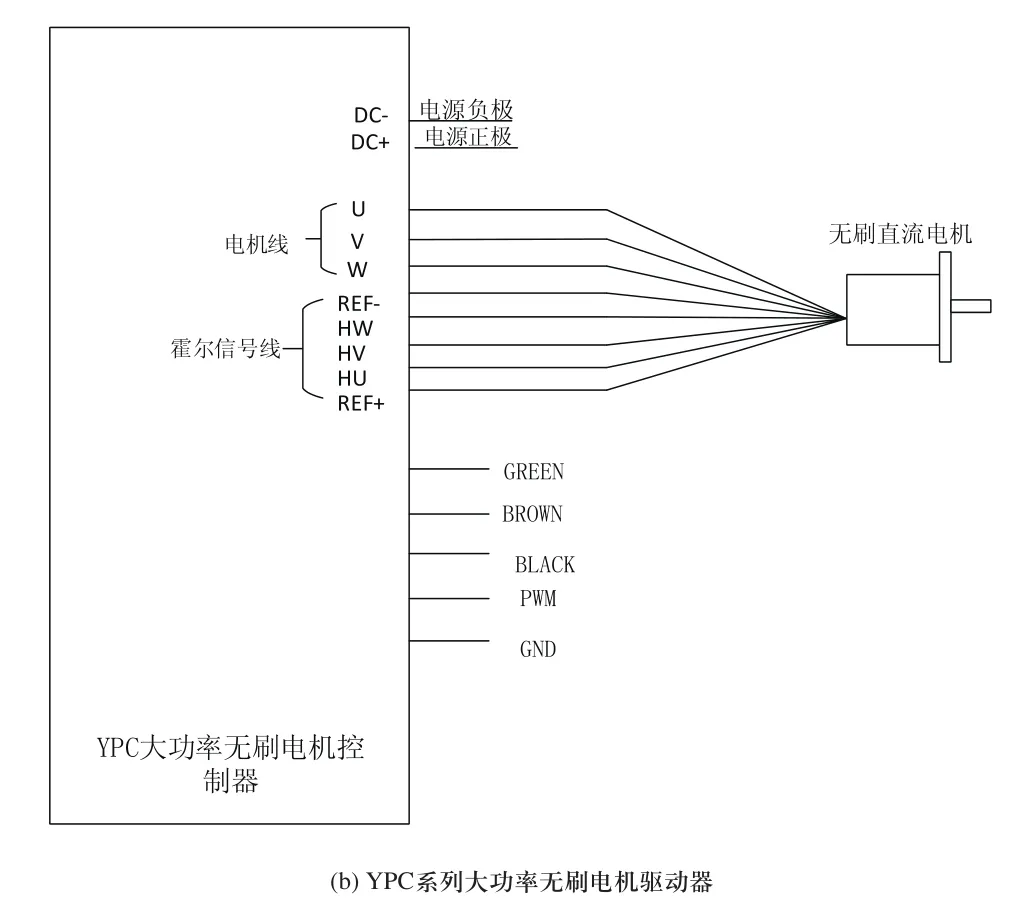
图3 电机驱动与电机连接图
2.4 接近开关模块
接近开关模块采用LJ12A3-4-Z/BX传感器作为接近传感器,这是一种NPN型电感式的接近开关传感器,主要用于检测金属物体,接近开关电路如图4所示。NPN是指当有信号触发时,信号输出线OUT和电源线VCC连接,相当于输出高电平的电源线[4]。当传感器检测到有物体靠近接近开关传感器时,传感器的开关闭合,电路导通,发光二极管通电发光,此时光敏三极管导通,PEI输出低电平。当传感器未检测到有物体靠近接近开关传感器时,传感器的开关常开,电路不导通,发光二极管不发光,光敏三极管不导通,PEI输出高电平。
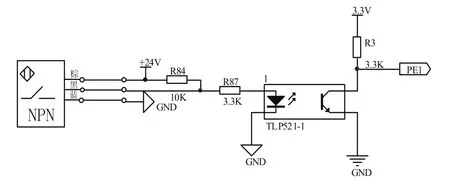
图4 接近开关模块
2.5 GPRS模块
本设计采用了SIMCom公司的SIM900A作为通信芯片,它支持TCP/IP协议。它属于双频GSM/GPRS模块,完全采用SMT封装形式,性能稳定,并且能够满足用户的多种需求[5]。具体电路图如图5所示。
图5为SIM900A与STM32连接图。单片机与SIM900A模块的连接和控制主要是通过串口进行控制。采用AT指令,可以在系统断线之后自动重新连接,不需手动连接。在实现断线自动重连功能时,涉及到DCD、RI两个引脚的使用。DCD引脚用来实现模数转换,当模块掉线时,会给DCD引脚一个高电平,当这个电平被DCD引脚检测到之后,模块就是采取相应的动作,来重新连接上线。RI引脚在模块上线之后,就一直保持高电平,在有电话和短信进来的时候,RI管脚就会有一个低电平出现,当RI引脚检测到这个低电平的时候,模块就会采取相应动作,进入到短信或者电话模式。该模块有两种工作频段,可以使用AT编程,能够实现不同格式的数据收发。
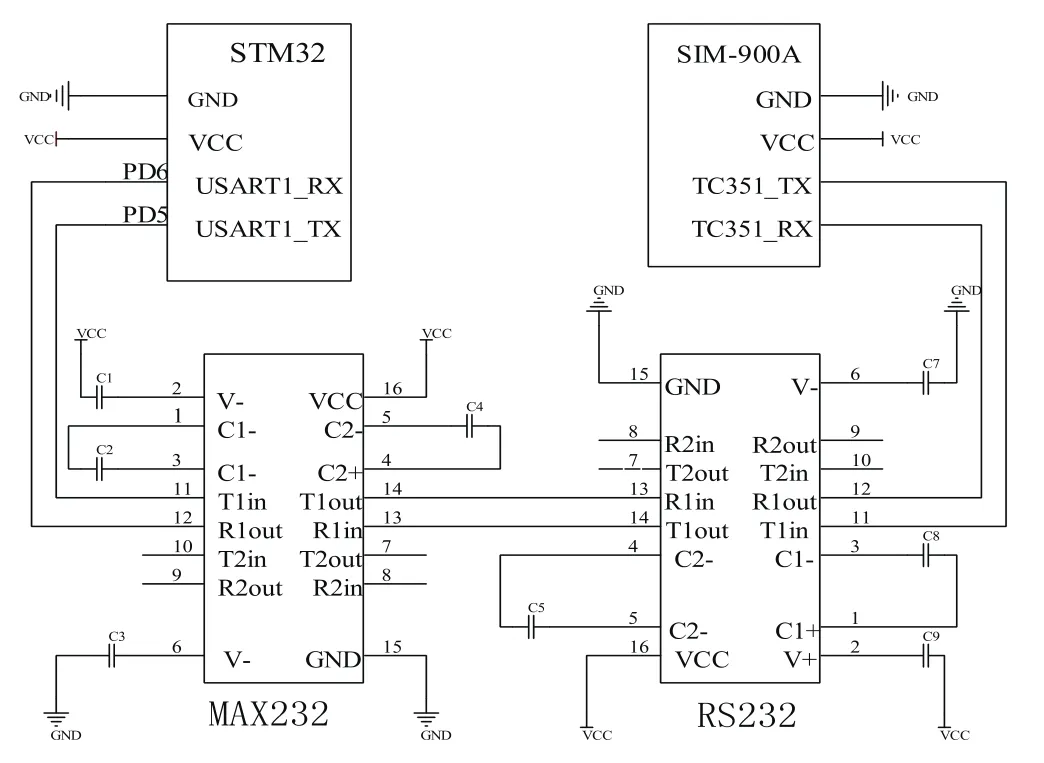
图5 无线通信模块电路
2.6 工业串口屏模块
采用北京迪文的DMT10600T102_02W作为触摸屏,实现人机之间的交互功能。在设计中,STM32主控制器根据触摸屏指令实现对生产工艺的设定和测试及运动控制等功能,该屏通过接口电路与STM32串口相连,实现STM32和触摸屏的数据通信。
3 系统软件设计
系统软件部分包括PWM波产生程序、机械翻醅程序设计、机械清洗程序设计、翻醅回零程序设计构成,其系统软件模块结构如图6所示。
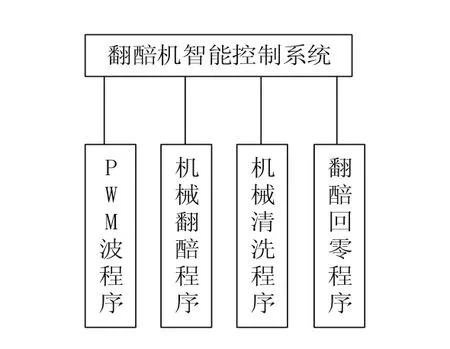
图6 系统软件模块结构图
该系统使用电机来控制翻醅机进行翻醅工作,其具体工作流程如下:首先启动命令,俯仰电机下降直到触发角度接近传感器四次后停止电机,然后开启翻醅电机抖动电机并且控制水平点击向前工作直到触发水平终端接近传感器,再然后关闭翻醅电机抖动电机并且水平电机向后工作直到触发水平终端接近传感器再关闭水平电机。以上述工作为一个流程改变触发角度接近传感器的次数,进行循环,完成整个翻醅工作。
4 结束语
随着工业自动化进程的发展,中国制造业逐渐转型升级为智能制造,因此发酵过程中同样需要智能化、自动化。本系统硬件方面的合理配合使用和软件方面细心编程都达到了工艺要求。对于整个系统稳定运行打下很好基础,实现了翻醅过程的自动控制,并且对于不同的阶段都实施了监控。本项目基于STM32微控制器设计翻醅机智能控制系统,能够对发酵过程进行监控,自动调整工艺参数,实现翻醅过程的自动化。该设计易于产品化,具有很大发展空间和市场竞争力。该翻醅机智能控制系统可切实地解决发酵过程中的一些弊端,具有很大的应用前景。
[1]朱瑶迪.镇江香醋固态发酵参数的智能在线监测及其分布研究[D].江苏大学,2016.
[2]张志成.基于STM32单片机的函数信号发生器[J].自动化与仪器仪表,2014(2):70-71.
[3]WANG Jianlin,YU Tao,JIN Cuiyun.On-line Estimation of Biomass in Fermentation Process Using Support Vector Machine[J].Chinese J.Chem.Eng,2006,14(3):383-388.
[4]孙长明.浅谈基于51系列单片机对PNP型传感器输出的电路设计[J].科技创新导报,2013(30):59-59.
[5]霍涛,贾振堂.基于STM32和SIM900A的无线通信模块设计与实现[J].电子设计工程,2014(17):106-110.
