水下机器人的机械手臂设计与仿真
2018-03-29田军委熊靖武史珂路
张 吉,田军委,王 沁,熊靖武,史珂路
(1.西安工业大学 机电工程学院,西安 710021;2.西安工业大学 电子信息工程学院,西安 710021)
0 引言
ROV广泛应用于水下救援、水下目标搜索、水下设备检查维护、水下考古、水下科研等领域。它可以代替人类在水下完成各种复杂的作业任务。而在此过程中ROV必须配备机械臂才能完成水下作业任务[1]。水下机械臂必须满足以下要求:由于工作环境在水下,机械臂材料需要耐腐蚀性强、密封好、抗压性高;更具操作者的指令能够准确的定位完成水下作业;由于ROV的本体很小,机械臂需要材质很轻。操作要灵活,操作范围不小于300mm,抓取重量不低于1kg,操作角度不低于60°。
1 整体结构设计说明与性能参数
1)机械臂的坐标形式与自由度的配置:考虑到ROV在水下工作环境复杂,可能有杂物,礁石,动物和水草等物体,对机械臂的控制造成影响,并且需要机械臂具有非常好的壁障性,应对水下的复杂环境,完成抓取物体的任务[6,7]。因此选择关节坐标式机械臂,且采用双目视觉技术,就像人的眼睛控制双手抓取物体。机械臂自由度的个数是由其用途决定的;本文设计的机械手臂工作环境为水下,考虑到水下机械臂的设计要求和操作范围,将采用转动关节式结构,且将机械臂设定为四个自由度。机械臂自由度布置如图1所示。机械臂整体形态仿照人手臂设计,为方便实现手抓姿态调整,实现对目标的抓取动作,将机械臂自由度设定为关节1为水平面的旋转运动、关节2为竖直平面的小幅度转动,关节3为竖直平面的转动,关节四为竖直平面的摆动。四个自由度可以使机械臂能够更加容易抓取到水下的物体。
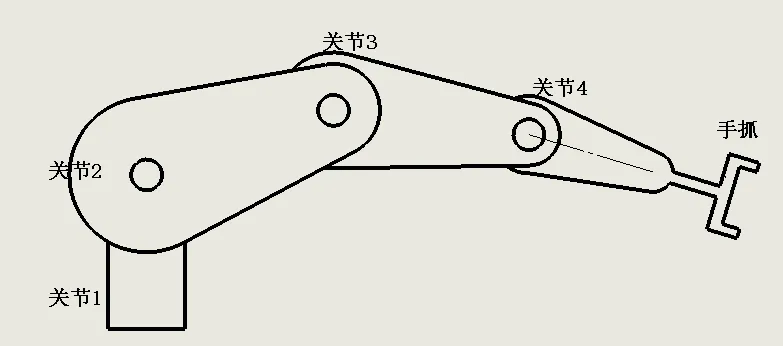
图1 机械臂自由度设置
2)安装方式的确定:装于潜水器上的机械臂在水下进行作业时,应具备两方面的能力:为完成作业任务,提供必要的操作;保持潜水器有稳定的方位,因为机械手作业受到的反作用力会影响ROV方位的稳定;故两只机械臂别设置在艇首头部的左、右两侧[5,8]。可以保证潜水器的平衡。
3)材料选型与性能参数:由于潜水器的本体非常小,所以要求安装的机械手臂必须满足轻型化、耐高压等要求。在负载允许的情况下采用密度小耐腐蚀的铝作为机械手臂的材料。经过运动分析发现双机械臂的运动最远可以达到如下位置,此时机械臂的关节2的运动角度为30°,而双目视觉测距模仿人眼观察物体,故机械臂的末端必须在视线范围内,再加上机械臂的操作角度不低于60°,因此关节1的转动角度定位60°。其中机械臂极限位置如图2所示。舵机的转动角度有90°、120°、180°、360°,其余各个关节的转动角度可以根据舵机的角度选取。
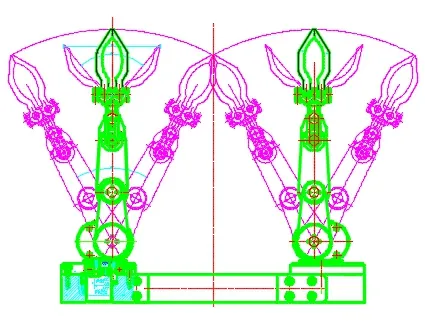
图2 机械臂极限位置
2 机械臂的受力分析及计算
利用理论力学和材料力学的方法求得机械臂运动至各自力矩最大位置时各关节的力矩,为各关节的驱动舵机选型做好基础。假设杆件质心位于几何中心。图3是机械臂的机械臂简化示意图,主要显示各关节中心线的距离。
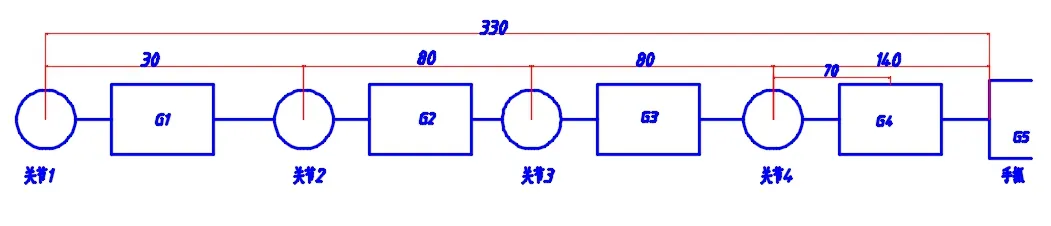
图3 机械臂简化示意图
2.1 执行单元扭矩估算
逐个分析各个关节的受力,先从机械臂末端开始,分析关节4可以简化为如图4所示的力学模型。假设杆件质心位于几何中心。
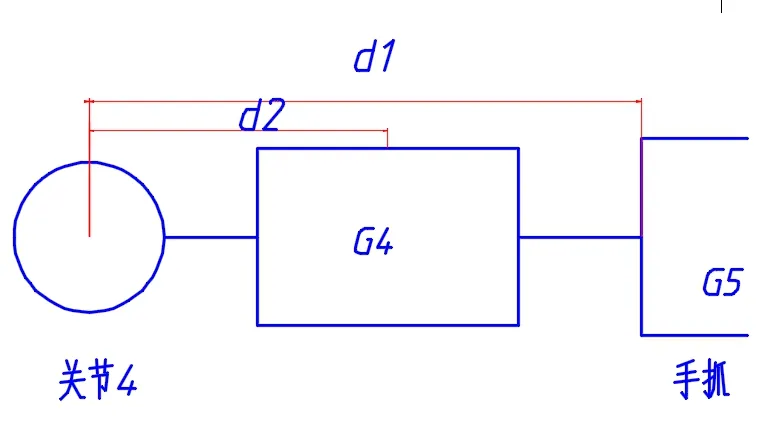
图4 关节4力矩的计算等效图
假设手抓和重物的质量为ms=1kg,则:Gs=ms.g=9.8N。
手腕的质量约为:m4=0.05kg,则:G4=m4.g=0.49N。
关节4到手抓中心的距离为:d1=140mm,关节4到手腕抓取中心的距离为:d2=70mm。
关节4的力矩为:M=G4.d4+G5.d5=1.406N.m。
按照以上的计算方案,先估算各个关节的质量,以此计算出其他关节的驱动力矩,如表1所示。
2.2 关节驱动方式及选型
驱动方式的选择非常重要,它的选择应该主要依据所用在的地方的要求,能否实现功能,还有就是工作环境,还要考虑价格,控制精度等方面。考虑到该机械臂用于水下作业,最终安装在ROV上,因此体积和重量不能太大。由设计要求,抓取1kg的物体,操作范围300mm可知,该机械臂抓取重量轻,不需要太大的力矩,故机械臂最终采用电力驱动形式。
关节1为机械臂的旋转关节,主要承受整个机械臂的重量,经过估算预估机械臂的扭矩为3.709N·m,选择KST X20-8.4-50超大扭力高压舵机,舵机如图5所示,该款舵机尺寸为40×20×39.5mm,当电压为8.4V时舵机的扭矩为4.5N.m,重量为78g。由于关节2的扭矩为3.609N.m,扭矩较大,故选择与关节1型号一样的舵机。关节3的扭矩为2.651N.m关节4的扭矩为1.406 N.m,选kingmax BLS7731HHV,扭矩为28.42kg.cm的舵机。
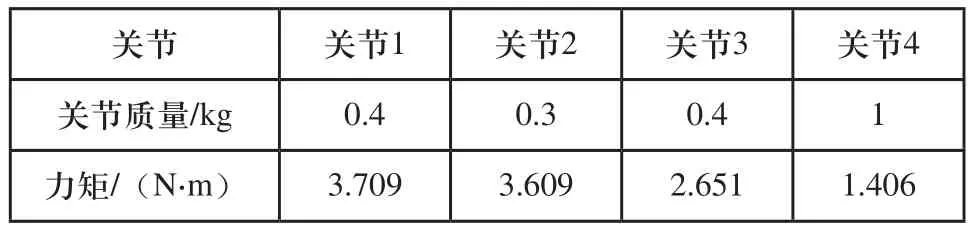
表1 各个关节电机的最大转
图5 kst舵机
2.3 执行单元校核计算
机械手臂在加减速运行过程中会产生惯性力,将各个力矩值乘以1.1倍做为最终结果,则关节4电机的最大力矩为:

根据扭矩,考虑关节驱动扭矩最大且电机旋转角速度最大的极限情况作为电机的最大功率。而关节的最大角速度为θ=3.7rad/s ,所以关节5处电机的最大功率为:

同理可以计算出其他关节的最大功率情况。
经过对比分析发现,各个关节的计算的扭矩均小于对应舵机的最大扭矩,符合设计要求,证明设计的机械臂可以抓取质量为1kg的重物,满足设计要求。说明舵机理论上能够实现抓取1kg的物体,能够实现设计任务的要求,能够达到预期的要求。
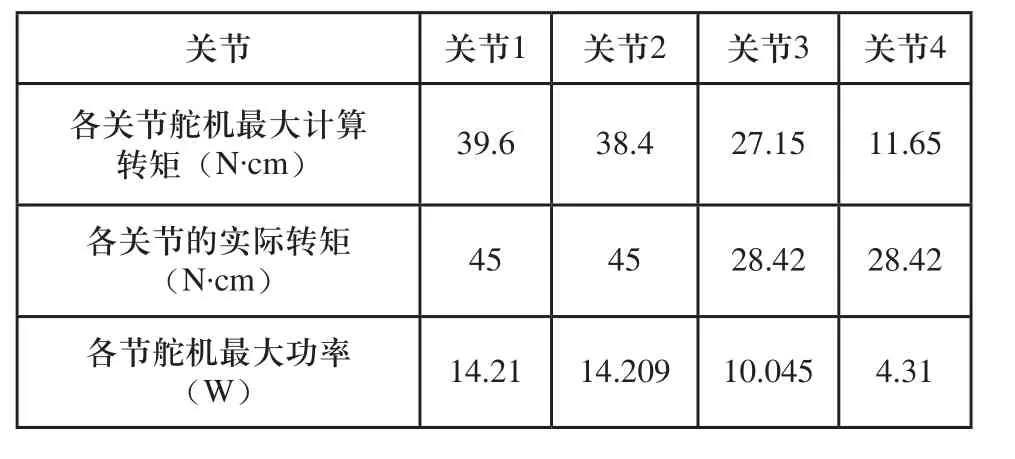
表2 各个关节电机的最大转矩和最大功率
3 机械臂的密封
ROV的机器臂密封是最关键的问题。一般有如下五个要求:
1)当压力超过范围时,不能发生泄漏;
2)密封要具有较长的寿命,尽量减少维修;
3)要具有能与环境相适应的能力;
4)易拆易装, 便于更换;
5)要具备很高的性价比[5]。
而O型密封圈的优势在于密封部位机构简单,安装部位紧凑,重量较轻且有自密封作用,密封性能较好,对于压力交变的场合也能适应。并且O型圈及其沟槽已标准化,成本低,便于使用和外购。故机械臂的静密封使用O型密封圈[3]。
对舵机进行详细防水密封设计中,由于舵机的输出轴端处的动密封非常重要,关系到舵机在水下工作的深度。密封采取的思路是,将轴端单独密封起来,并将输出轴端放大。输出轴的扭矩通过内齿轮和外齿轮啮合传递给输出定位法兰,在输出定位法兰的轴径上做O型密封圈槽,O型密封圈和轴端套组成O型圈密封,轴端套与舵机之间通过胶接,采用环氧树脂粘接,这种胶起到连接和密封的作用,输出定位法兰的轴向定位,通过M2.5的螺钉和垫片定位,舵机输出轴端中间自带一个M2.5的螺纹连接孔,然后在螺钉和垫片周围使用胶进行密封,输出定位法兰与外部零件的连接通过四个M2的螺纹孔连接,最终舵机的密封结构如图6所示。
4 三围建模与仿真
最终设计的机械臂如图7所示,由装配体可以看出,该机械臂比例协调,无干涉现象,各部分的都能进行装配,不会出现能在SolidWorks中能够装配,在实际中无法装配的现象,机械手臂的质量为1.936kg,关节1的旋转角度为60°,单只机械手臂的总长为442mm。
4.1 手抓结构分析
为了能准确抓取物体,设计成两爪抓取物体,市场上机械臂手抓选择的材料是ABS塑料和铝合金,为了保证手抓有足够的强度,选择铝合金2A12做手抓的主要材料,舵机支撑架上面需要开孔安装舵机和手抓,还要与上个关节连接,故采用铝合金材料,两个爪之间是两个四分之一齿轮啮合,通过舵机驱动抓取物体。
手爪由两个分离的爪组成,将防水舵机部件装在爪座上,爪如图8所示,下部是齿轮的一部分,将有四个螺纹孔的一边与舵机部件的输出法兰连接,另一边由装有微型轴承,通过齿的啮合控制手抓的张合,由于齿轮只有一部分,为确保齿轮一直在啮合,选取的可以转动90°的舵机,手抓的张开的最大尺寸158mm,手爪闭合时,如图8所示。
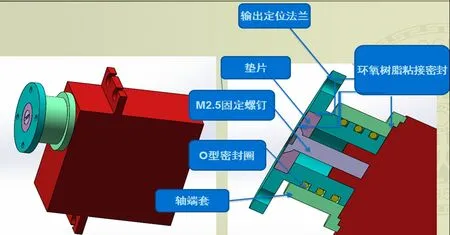
图6 舵机密封结构图
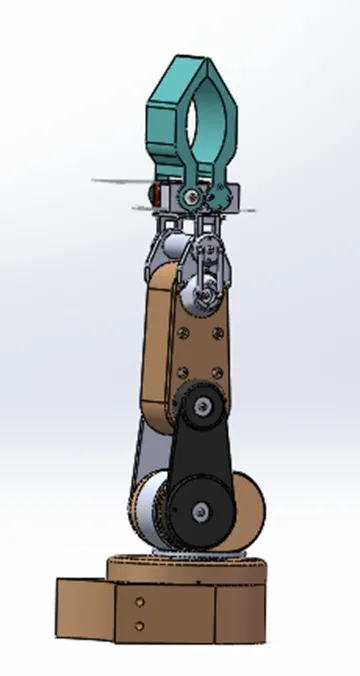
图7 机械手臂的实体模型
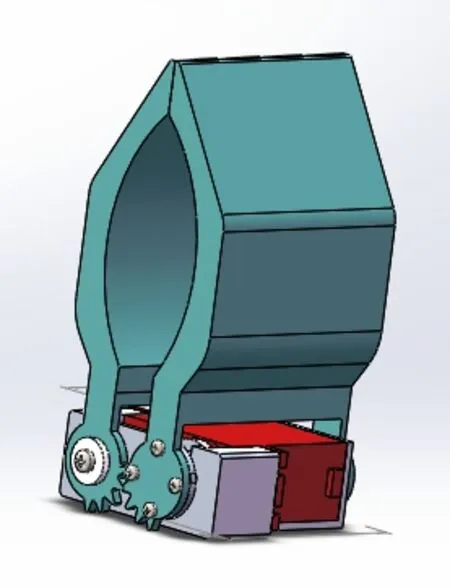
图8 手抓装配效果
4.2 手抓的仿真结果及其分析
手抓是机械手臂抓取重物的关键零件,与机械臂的性能有着直接的关系。作用在手抓上的力主要为抓取重物的重力,抓取重物重量估算为1kg,则作用在手抓上的力F=9.8N。假设力作用在离驱动电机最远的位置,如图9所示为手抓尖端位置,仿真时的固定位置是手抓螺栓空。经过这样的受力分析,可以模拟实际的受力情况。
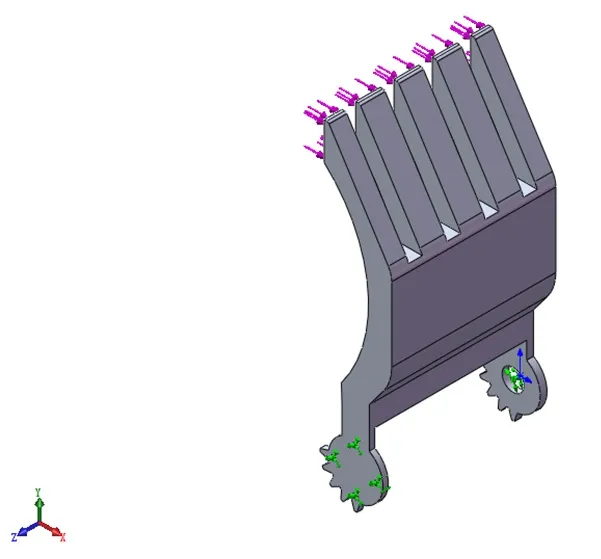
图9 手抓的受力
通过手抓的仿真分析,手抓的应力分析结果如图10所示,最大应力出现在手抓下部圆弧过度的地方,这里是直接从圆弧过度成直线,且结构比较细小,故应力最大,应力值为1.89223×107N/m2小于材料的屈服强度2.75742×107N/m2,因此满足设计要求,为了最大减小应力,分析完成后,在此处添加圆弧过度。
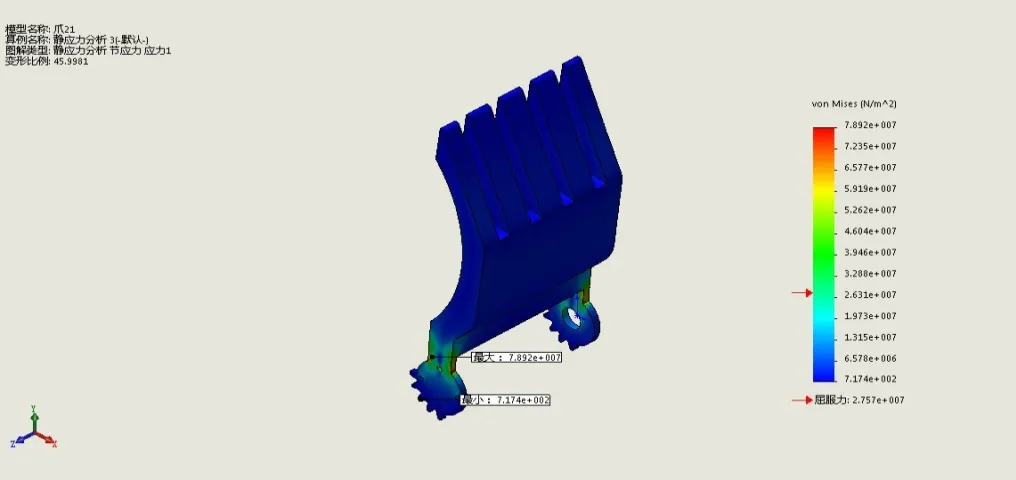
图10 手抓应力图
爪的在载荷的作用下产生位移变形如图11所示,最大位移出现在手抓的最远处,从上到下位移逐渐减小,最大位移为0.260179mm,位移很小,故此结构合理。
如图12所示。零件的应变呈现不规则分布,其最大应变出现在右端最上边螺钉连接处,最大为0.000921348,应变很小,因此该零件结构合理,满足设计要求,符合设计规范。
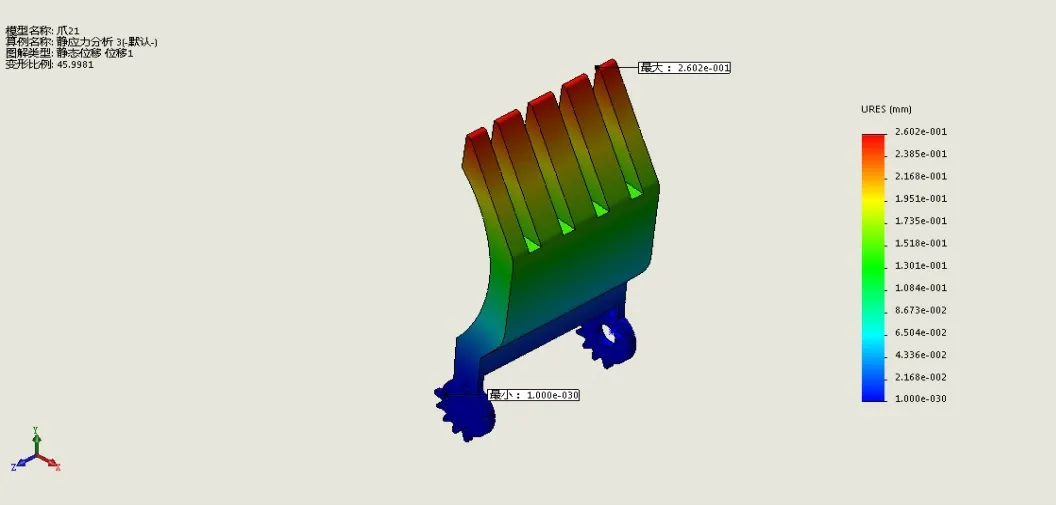
图11 手抓变形图
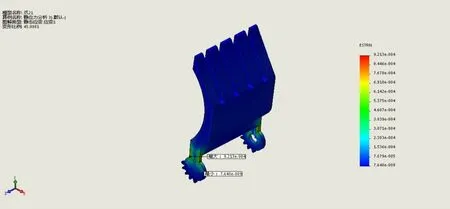
图12 手抓的应变图
5 结束语
本文设计了一款ROV的机械手臂,对机械臂的自由度、坐标形式、与水下机器人本体连接方式、材料、参数的确定,和对关节处和抓手处的驱动选型,选择舵机作为驱动,设计了舵机的详细防水结构。本机械手臂设计成连杆结构,充当机械臂的手腕,减小体积,手腕可以调节抓取物体的角度,调节角度为30°,关节1定的定位角为60°。单只机械臂的总长为442mm,抓取物体为1千克,通过对手抓的仿真,其满足设计要求。终可在水深300m下作业的四自由度机械手臂。
[1]魏晓霞,蒲小琼.基于水下爬行机器人的机械手结构设计机器人技术[J].机械,2015(4):77-80.
[2]王璇,刘涛,高波.水下机械手的研发现状及发展趋势[J].机电产品开发与创新.2012(3):25-29.
[3]钟先友,谭跃刚.水下机器人动密封技术[J].机械工程师,2006(1):40-41.
[4]张昕妍.中国水下机器人的诞生与样机化发转模式浅析[J].科技和产业.2015,7;67-81.
[5]王承禧.水下机械手结构设计的几个问题[J].海洋工程.1987,05;70-76.
[6]杨喜荣.深海水下作业型机械手控制系统研究[D].浙江大学,2006.
[7]安江波,孙昌将,凌华.水下机械手结构设计与研究[J].机械工程与自动化,2009(3):91-95.
[8]Christensen,L.,et al.Hardware ROV simulation facility for the evaluation of novel underwater manipulation techniques[J].Oceans,2009:1-8.
