永磁吸附爪刺式爬壁机器人复合轮结构设计
2018-03-29魏军英范召舰张萌萌
魏军英,范召舰,张萌萌,袁 苑,赵 坡
(山东科技大学 机械电子工程学院,青岛 266590)
0 引言
永磁吸附式爬壁机器人安全性较高,具有吸附力稳定,无需额外消耗电能等优点,已广泛应用于电厂、核工业、消防和造船行业中,主要功能用途为钢铁墙壁的清洁和喷涂、油罐厚度的检测和探伤检查等作业[1]。
目前对永磁吸附式爬壁机器人的研究主要集中在永磁轮本体结构设计[2]、吸附单元拓扑结构设计优化[3,4]和控制系统[5]等方面。永磁轮的性能对机器人在磁基墙壁上安全爬行起关键作用[6]。文献[2]提出一种永磁体整体式分布的永磁轮,永磁体分别安装在磁轮两侧,从而与磁基墙壁形成磁通回路。通过试验表明,整体式永磁轮有效提高爬壁机器人吸附力,增加其运行可靠性。现有对永磁轮的研究多集中在提升吸附性能方面,而对其运行稳定性、受力平衡、壁面自适应等研究较少。传统的磁轮和底板的刚性连接限制了机器人对曲面的适应性,而简单的铰链连接由于自由度过高使得机器人磁轮在重力作用下出现外/内翻现象。本文针对凹凸不平的磁基曲面,基于昆虫柔性跗节链的结构特点设计了一种仿生柔性爪刺式复合轮结构,并改进现有永磁轮与底板连接方式,实现了永磁吸附式爬壁机器人的小型化、轻量化。
1 机器人主体结构设计
永磁吸附式爬壁机器人主体结构如图1(a)所示。该机器人为接触式吸附方式,采用4轮轴对称式布局,前置驱动电机通过减速机带动2个复合轮的中心旋转轴转动,通过控制前置驱动电机实现主体爬行及拐弯。前轮为复合轮,通过将仿生爪刺抓附方式与永磁吸附式机器人相结合,提高了吸附性能,同时实现吸附和行走两种功能;后轮为万向轮,主要起支撑作用。整体复合轮与底板的安装方式如图1(b)所示,复合轮以悬挂式与车体框架连接。其中复合轮与磁轮架通过滚动轴承连接,磁轮架与上悬挂板通过气囊连接,并在两侧安装一对铰链连杆,使得复合轮能自适应调节,适应不同曲率半径的钢制壁面,提高吸附力和稳定性。
2 复合轮结构设计及分析
单个复合轮由永磁铁、爪刺及隔片、轴承、轴承座、轭铁等部分组成,如图2所示。复合轮整体半径约150mm,厚度85mm。每个复合轮中包括6组仿生柔性爪刺及隔片,相邻爪刺足片之间通过隔片隔开,保证每个爪刺足片能够独立运动不产生干涉。同时将永磁体周向安装在复合轮轴承座外表面,最后通过仿生柔性连接结构将爪刺足片与永磁体外轮毂连接,使得爪刺足片包裹着永磁体。该复合轮结构设计可有效防止磁轮打滑,并保护易碎的永磁体,同时将磁吸附传递到爪刺尖部,在磁吸力的作用下,提高爬行稳定性,降低其发生外/内翻现象。

图1 机器人主体结构图
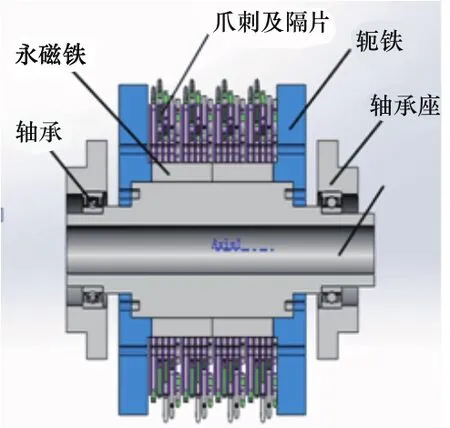
图2 单个复合轮结构示意图
2.1 仿生柔性爪刺足片的结构设计
在爪刺式爬壁机器人的设计中,柔性爪刺足片的结构是仿生柔性爪刺足设计的关键[7]。研究发现,大自然中很多生物均能在垂直壁面上进行攀爬[8],其中节肢类和爬行类昆虫通过极细的足尖刚毛抓住物体的粗糙表皮,带粘性的足尖刚毛能在粗糙表面产生足够的勾附力与自身重力抵消,实现在垂直壁面上爬行[9]。如图3(a)所示,通过对东方绢金龟的跗节链长度测量发现,其前四个跗分节(Tal-Ta4)长度基本一致,Ta5跗分节较长,如图3(b)所示。

图3 东方绢金龟结构图
仿生柔性爪刺足片的结构包括仿生柔性连接结构、爪刺、足部基体等。其中柔性连接结构的作用与柔性跗节链对昆虫足部的作用类似,其设计需要满足以下两个条件:
1)为了避免单个爪刺应力集中而造成损坏,应使载荷尽可能均匀地分布在多个爪刺上。
2)相邻爪刺之间运动的独立性。在抓附过程中,当其中一个爪刺抓附在壁面上时,若其他爪刺足片未找到可抓附表面形貌,爪刺便可以继续沿壁面滑动,继续寻找可抓附表面形貌。通过对东方绢金龟的柔性跗节链结构进行仿生设计,得到如图4所示的仿生柔性爪刺足片,爪刺通过柔性连接结构与足部基体连接,柔性连接结构由三个S形单元组成,具有俯仰及伸缩自由度,能随墙壁的粗糙程度自行调整起伏,保证每个爪刺足片均能承受勾附力。本文将仿生爪剌足片设计为硅钢片一体结构,既考虑到永磁体通过硅钢片导磁对吸附性能的影响,又使得加工工艺简单,为永磁吸附式爬壁机器人实现小型化、轻量化提供了条件。

图4 仿生柔性爪刺足片示意图
2.2 仿生柔性爪刺设计
通过对昆虫攀爬方式进行研究,仿生爪刺尖圆弧半径对其抓附能力起关键作用,如果爪尖半径远小于壁面表面形貌半径,爪刺尖能够产生较大的扒附力;如果爪刺尖半径比壁面表面形貌半径大或大小相当,爪刺尖将很难与壁面形成机械锁合。现对爪刺勾附壁面角度进行分析,假定一粗糙壁面,对爪刺滑过表面的过程进行剖面分析。

图5 爪刺勾附粗糙磁基壁面模型剖视图
如图5所示,由于在爪刺在壁面表面上滑动时,爪刺尖端并不能一直沿表面形貌运动,可通过圆弧中心的轨迹路径来简化描述壁面的表面形貌。当爪刺接触粗糙壁面时,定义θ为轨迹路径法向与壁面法向夹角。若θ大于最小可用角θmin,爪刺会沿墙壁下滑至爪刺能勾附到可用表面形貌时停止,此时爪刺引线与水平面所成的角度为θa,可提供力进行攀爬。爪刺的勾附力与爪刺的切入角θa、最小可用角度θmin、以及摩擦系数μ有关:

由式(1)得出,当壁面凹凸不平时,爪刺抓附性能一部分由爪刺切入角和壁面的摩擦系数μ决定,另一部分由壁面材料强度大小决定。
2.3 仿生柔性爪刺足片分析
由于本文仿生爪刺足片采用硅钢片一体化结构,爪刺与壁面接触过程中,柔性连接结构的变形较小,可通过三阶刚度矩阵K来描述柔性爪刺足片在(x,y)平面内的线性刚度与转动刚度,刚度矩阵如式(2)所示:

图6 柔性连接结构与壁面夹角为α,刚度矩阵为Kα
将爪刺与壁面间的接触简化为转动约束,以爪刺与壁面接触点作为刚度矩阵的坐标原点,其中x轴垂直于壁面,y轴平行于壁面,θ逆时针为正方向,建立刚度矩阵坐标系,如图6所示。当柔性连接结构平行壁面(α=0)时,令柔性爪剌足片的刚度矩阵为K;当柔性连接结构与壁面夹角为α时,其刚度矩阵为Kα,有:

其中变换矩阵Tα如式(4)所示:

为进一步提高爪刺在壁面上的抓附性,描述柔性爪刺足片的刚度矩阵K需满足以下条件[10]:
1)在预压过程中,kxx在负x轴方向应足够小以便爪刺能与磁基壁面接触,且受到的压附反力较小;在脱附阶段,kxx在正x轴方向足够大以便爪刺能够迅速脱附而不会卡在裂缝中。
2)需保持kyy大小适中。若kyy值过小,在爪刺足沿壁面滑动以抓附凹凸槽时,柔性连接结构变形较大使更多的爪刺抓附在壁面上,不易脱附;若kyy值过大,柔性连接结构可能不足以支撑机器人重力,容易使其发生机械破坏。
3)需保持kxy尽量小,最好为负值。这样爪刺在y轴方向发生变形时,不会在负x轴方向变形而导致爪刺过早脱附。
4)需保持kxθ与kyθ尽量小,可以为负值。保证柔性连接机构在抓附阶段,不会因为在(x,y)平面内变形而导致爪刺脱附。

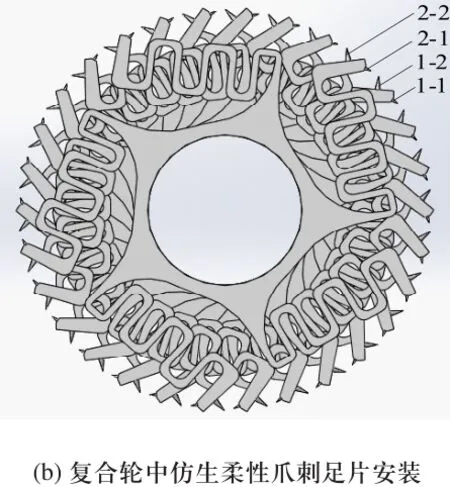
图7 仿生柔性爪刺足片安装
考虑到柔性连接结构刚度难于通过试验测量,本文利用有限元方法分析对其刚度矩阵进行数值计算,以验证柔性连接结构设计的合理性。在有限元分析中,分别在足片基体上施加固定载荷,在爪刺尖端施加位移载荷δ(Δux,Δvy,Δwθ)′,计算得到爪刺尖端受力情况F(Fxx,Fyy,Mθθ)′,其中(Δux,Δvy,Δwθ)′和(Fx,Fy,Mθ)′分别是爪刺尖端在(x,y,θ)方向上的位移与力。分别令δ1=(-0.5mm,0mm,0°)′,δ2=(0mm,0.2mm,0°)′,δ3=(0mm,0mm,2°)′进行有限元分析,得到对应的F1,F2,F3,由式(5)得到柔性爪刺足片的刚度矩阵K,最终得到夹角为α时的柔性爪刺足片刚度矩阵Kα。仿生柔性爪刺足片刚度分析结果如表1所示,可以得出在任一夹角下,计算结果能较好满足对其刚度要求,从而验证了仿生柔性连接结构设计的有效性和可靠性。


表1 仿生柔性爪刺足片刚度分析结果
3 试验结果
本试验以上述参数搭建试验样机如图8所示,通过试验,验证了该永磁吸附式爬壁机器人复合轮设计的可靠性。在试验中,该机器人能够带载攀爬磁基墙壁,载荷重量最高为600N。试验过程为从1m垂直爬行至3m,再折返至1m。通过试验效果可以看出,结合仿生爪刺足与永磁吸附的爬壁机器人,具有良好的攀爬效果,达到了预期效果。

图8 永磁吸附式爬壁机器人样机试验
4 结论
通过仿真模型设计分析,及原理样机进行的试验,可得到如下结论:
1)通过对东方销金龟足部柔性附节链的观察研究,本文基于仿生原理设计一种仿生柔性爪刺足片结构。利用有限元方法对仿生结构进行分析,验证了爪刺足片中仿生柔性连接结构的合理性与有效性。
2)进行永磁吸附式爬壁机器人样机试验,试验表明复合轮结构设计能够满足带载试验要求,具有良好的攀爬效果,为爬壁机器人总体结构优化设计提供依据。
[1]戴振东,STANISLAV Gorb.蝗虫脚掌微结构及其接触的有限元分析[J].上海交通大学学报,2003,37(1):66-69.
[2]JinHo Kim. Design and Experimental Implementation of Easily Detachable Permanent Magnet Reluctance Wheel for Wall-Climbing Mobile Robot[J].Journal of Magnetics,2010,15(15):1-1.
[3]潘柏松.基于Halbach阵列爬壁机器人永磁轮吸附单元的设计与优化[J].浙江工业大学学报,2015,43(4):393-397.
[4]沈青青,张晋,李根.基于Halbach阵列爬壁机器人磁吸附单元的优化设计[J].轻工机械,2014,32(5):17-21.
[5]张强强.可变磁力复合轮式爬壁机器人的研究[D].太原理工大学,2013.
[6]丁问司.永磁吸附履带式船舶爬壁机器人结构设计[J].机床与液压,2016,44(6).
[7]刘彦伟.爪刺式爬壁机器人仿生机理与系统研究[D].中国科学技术大学,2015.
[8]陈东良,张群,王立权,左勇胜.一种粗糙壁面爬行机器人的设计与实现[J].哈尔滨工程大学学报,2012,33(2):209-213.
[9]管兴伟,张昊,吉爱红,戴振东.爬壁机器人尖爪型仿生脚掌设计[J].机电工程,2009,26(2):1-3.
[10]马培荪,陈佳品.油罐容积检测用爬壁机器人的研制[J].上海交通大学学报,1996,30(11):159-164.
