修剪型神经网络在锚杆锚固缺陷识别中的应用
2018-03-28孙晓云吴世星石家庄铁道大学电气与电子工程学院石家庄050043河北省发展与改革委员会石家庄050043
孙晓云, 吴世星, 韩 广, 田 军, 成 琦(.石家庄铁道大学 电气与电子工程学院,石家庄 050043;.河北省发展与改革委员会,石家庄 050043)
锚杆锚固技术能够充分挖掘岩土自身能量,调用岩土的自身强度和自稳能力,起到加固和支护围岩的作用,加之其能够减轻结构自重、节省工程材料、减少场地面积等优点,锚杆锚固技术在国内外得到了快速发展。但是,锚杆锚固施工技术具有高度隐蔽性,使得很难发现其质量问题,一旦出现质量问题将会造成人员和财产的巨大损失。因此,识别锚杆锚固是否有缺陷及缺陷类型成为了检测锚杆锚固质量的一项重要任务。
传统的锚杆锚固质量检测方法有拉拔试验法[1-2]和取芯法[3],它们耗时费力,具有破坏性。而无损检测技术的研究弥补了传统检测方法的不足,成为了现阶段检测锚杆锚固质量的一大发展趋势。Thurner[4]提出利用超声波检测锚杆,但超声波法激发条件苛刻、衰减速度很快,只适用于短锚杆,难以适用于种类繁多,长度较长的锚杆。汪明武等[5-7]通过锚杆锚固室内模型和现场试验的无损检测,提出了声频应力波法,它的工作核心是锚固段长度的测定和系统参数的设定。李义等[8-9],以一维弹性杆的振动理论为基础,提出了应力波反射法,该方法基本满足锚杆施工安全检测及锚杆支护优化的要求。但是它对底端反射信号不能很好识别。以上方法存在着许多影响因素, 如:敲击频率、自由段长度、注浆密实度等,因此,很难根据实测曲线判断锚杆锚固质量。针对以上不足本文采用修剪型神经网络判断锚杆锚固质量,并对其进行缺陷识别。从采集的锚杆信号中提取特征值作为人工神经网络的输入,通过网络训练、测试对锚杆锚固质量进行智能化分类,从而判断出锚杆锚固质量的缺陷类型。
近年来,研究者们提出一些修剪型神经网络算法。Le等[10]提出了一种早期的神经网络剪枝算法:最优脑损伤(Optimal Brain Damage,OBD)算法,该算法是通过计算各个权值对网络误差的特征值,删除特征值最小的权值,实现网络结构的简化。但该算法的不足之处在于,每次剪之前都要完整的训练一次神经网络,这样不仅会降低算法的效率,而且还需要大量的计算时间。在OBD的基础上Hassibi等[11]提出了一种最优脑外科结构(OBS),这种模型利用修改Hessian矩阵的方法对神经网络的误差函数进行调整,该算法可以同时修剪几个权值,还可以对剩余的神经元参数进行修正,但是该算法的不足之处是,Hessian矩阵及其求逆的过程需要耗费大量的时间。李倩等[12]基于遗传算法和局部搜索算法,提出了混合剪枝算法,该算法在寻优能力,简化网络结构,保证网络稳定性方面具有明显的优势,适合大规模的神经网络结构优化问题。Philippe等[13]提出了基于敏感度分析(SA)的修剪型神经网络。利用神经网络输出值的敏感度分析,确定隐含层神经元对输出神经元的贡献,删除贡献较小的隐含层神经元,从而达到简化网络结构。乔俊飞等[14]提出一种快速修剪算法其实质是求取隐含层神经元对神经网络输出的灵敏度。根据各神经元的灵敏度,按照一定的准则削减冗余神经元,获得紧凑的神经网络结构。
本文针对不同缺陷类型的锚杆锚固提出了一种自适应阈值前馈神经网络修剪算法对其缺陷进行分类识别。以锚杆锚固加速度信号的特征值作为样本数据,利用显著性指数判断隐含层神经元对网络输出的贡献值大小,通过自适应调节网络阈值,调整网络结构,对样本进行分类识别。实验分析表明:该算法能够优化网络结构,提高网络性能并且能够准确的识别出锚杆锚固的缺陷类型,提高锚杆锚固的识别精度。
本文结构如下:
(1) 主要介绍了锚杆锚固模型和数据采集及特征值提取。
(2) 修剪型网络结构设计,主要介绍了前馈神经网络、BP算法以及自适应阈值的设定。
(3) 实验分析,用设计好的网络模型对采集的锚杆锚固数据进行训练测试,对锚杆锚固缺陷进行分类识别。采用工程案例对此算法做了进一步验证。
1 锚杆锚固数据采集及特征提取
1.1 锚杆锚固模型
带锚固体的锚杆分为三部分:锚头、自由段和锚固段。本实验室已完成的锚杆锚固模型:2 m的正常的加固锚杆模型和2 m的带缺陷的锚杆模型,其锚固段所选用的水泥浆材料是由砂、42.5号符合硅酸盐水泥、水按比例为4∶2∶1混合而成的,桩体外壳是由直径0.2 m的PVC管包裹。两类锚杆的自由段长度为1 m,螺纹钢直径为0.02 m,锚固段长度为1 m,浇筑段直径为0.2 m,缺陷锚杆的缺陷段长度为0.2 m,直径为0.1 m。锚杆锚固的实物模型如图1所示。

图1 加固锚杆实物模型
1.2 数据采集及特征提取
为了识别出不同缺陷类型的锚杆锚固,本文基于ANSYS-DYNA有限元分析软件模拟出常见的四种类型的锚杆锚固:正常加固锚杆、长度欠长加固锚杆、长度过长加固锚杆、带空洞的加固锚杆。首先,建立好有限元网格模型后,设置采样频率为20 kHz,用小锤激励信号对锚杆的锚头进行敲击,并由安装在自由端端头的加速度传感器接收锚杆顶端加速度曲线。由于不同状态下锚杆锚固的加速度反射信号所携带的能量是不相同的,利用小波包分解将反射信号分解到不同的频带,这些不同的频带所对应的能量值作为系统的特征向量。
利用小波包分解对加速度信号进行特征提取过程:①对四种类型的加速度信号进行3层小波包分解,得到各层的低频信号和高频信号;②对四种信号从低频到高频的各个节点的小波系数进行重构,计算各重构信号的能量;③构造特征向量并将其归一化处理。
根据以上步骤将得到的8维特征能量作为自组织神经网络的输入,锚杆缺陷类型作为输出,锚杆缺陷类型的期望输出采用“n中取1”法即输入被识别为哪一类时,输出就对应取为1,其余为0。如表1所示。

表1 缺陷类型的期望输出表
2 自适应阈值修剪型网络结构设计
2.1 前馈神经网络
前馈神经网络各神经元从输入层开始,接收前一级输入,并输入到下一级,直至输出层,整个网络中无反馈。一般前馈神经网络有三层组成即:输入层、隐含层、输出层。不同层神经元之间由权值相连接,而隐含层神经元的节点数由问题的复杂程度来决定。三层神经网络结构图,如图2所示。

图2 三层神经网络结构
输入层神经元个数为m个,隐含层神经元个数为n个,输出层神经元个数为k个,输入层与隐含层神经元之间的连接权值用w表示,隐含层与输出层神经元之间的连接权值用v表示。隐含层的输入是输入层的输出与对应权值乘积的加权和。同理,输出层的输入是隐含层的输出值与隐含层与输出层之间对应权值乘积的加权和。隐含层的激活函数采用sigmiod函数,输出层采用线性函数。
2.2 BP算法
图2三层神经网络,其正向传播过程:
输入层:输入函数取线性函数,则第i个神经元输出为
ti=xi
(1)
隐含层:激活函数采用的sigmiod函数,其第j个神经元的输出为
(2)
输出层:激活函数采用的线性函数则第k个神经元的输出为
(3)
若神经网络输出y与期望值z不一致,则误差函数为e=z-y。通过梯度下降法调整权值使误差函数绝对值达到最小。
神经网络的训练指标为
(4)
由梯度下降法得Δv(k)的变化量为
(5)
权值v(k)更新可表示为
v(k+1)=v(k)-ηΔv(k)
(6)
其中η为学习率
同理可得输入层与隐含层神经元权值Δw(k)的变化量
(7)
其中

(8)
权值w(k)更新表示如下
w(k+1)=w(k)-ηΔw(k)
(9)
BP神经网络是神经网络的主要模型之一,但是它在使用之前需要事先确定网络结构,而神经网络的结构关系着网络的性能,网络结构复杂,将会出现冗余节点,导致网络泛化能力降低。修剪型神经网络不用事先确定网络结构,它可以根据问题的复杂度动态地调整网络结构,减少网络冗余节点,提高识别精度。
2.3 自适应阈值前馈神经网络修剪算法
修剪算法[15]是一种在线调整神经网络结构(如图3所示),删除网络中多余的神经元个数,有效的解决了网络中由于神经元过多而出现的过拟合问题,是一种将复杂结构简单化的算法。
图中虚线所连接的神经元是对网络输出贡献值较小的,在删减过程中该神经元和其连接权值将被删除。由公式表示删减过程中网络权值的变化如下
删减前连接权值
(10)
删减后连接权值
(11)
结合图和公式可以看出隐含层第2号和第4号节点对网络的输出贡献值少,在删减过程中该节点和其连接权值都被删除。由神经网络的输出公式(3)可知隐含层神经元对网络输出的贡献值不仅与隐含层神经元的输出有关,还与隐含层和输出层之间的连接权值有关。因此,本文提出利用隐含层神经元节点输出的显著性来判断该节点的重要性。将式(3)扩展可得以下公式

图3 修剪型神经网络
(12)

(13)

(14)
式中:SIj表示第j个隐含层神经元显著性指数;n表示隐含层神经元的个数。
删减过程中,隐含层的节点数和显著性指数是不断变化的,则删减阈值的设定应根据显著性指数和隐含层节点个数的变化自适应调整,因此可将删减阈值表示为
(15)
如果GSIj
3 实验设计
3.1 实验分析
首先,对由ANSYS-DYNA有限元模拟的四种锚杆锚固类型进行数据采集,对四种类型的锚杆锚固分别采集50组加速度信号,其次,对采集到的200组数据用小波提取能量的方法对其加速度信号进行特征提取,最后,随机抽取160组数据用于训练,剩余的40组数据用于测试。给定一个有足够隐含层节点的神经网络,根据锚杆的样本数据,设置其输入层神经元个数为8,输出层神经元个数为4,用BP神经网络对数据进行训练,根据显著性判断隐含层神经元对网络输出贡献值大小并删除网络中贡献值小的节点。其中学习率为η=0.15,训练过程中隐含层节点个数变化曲线如图4所示。
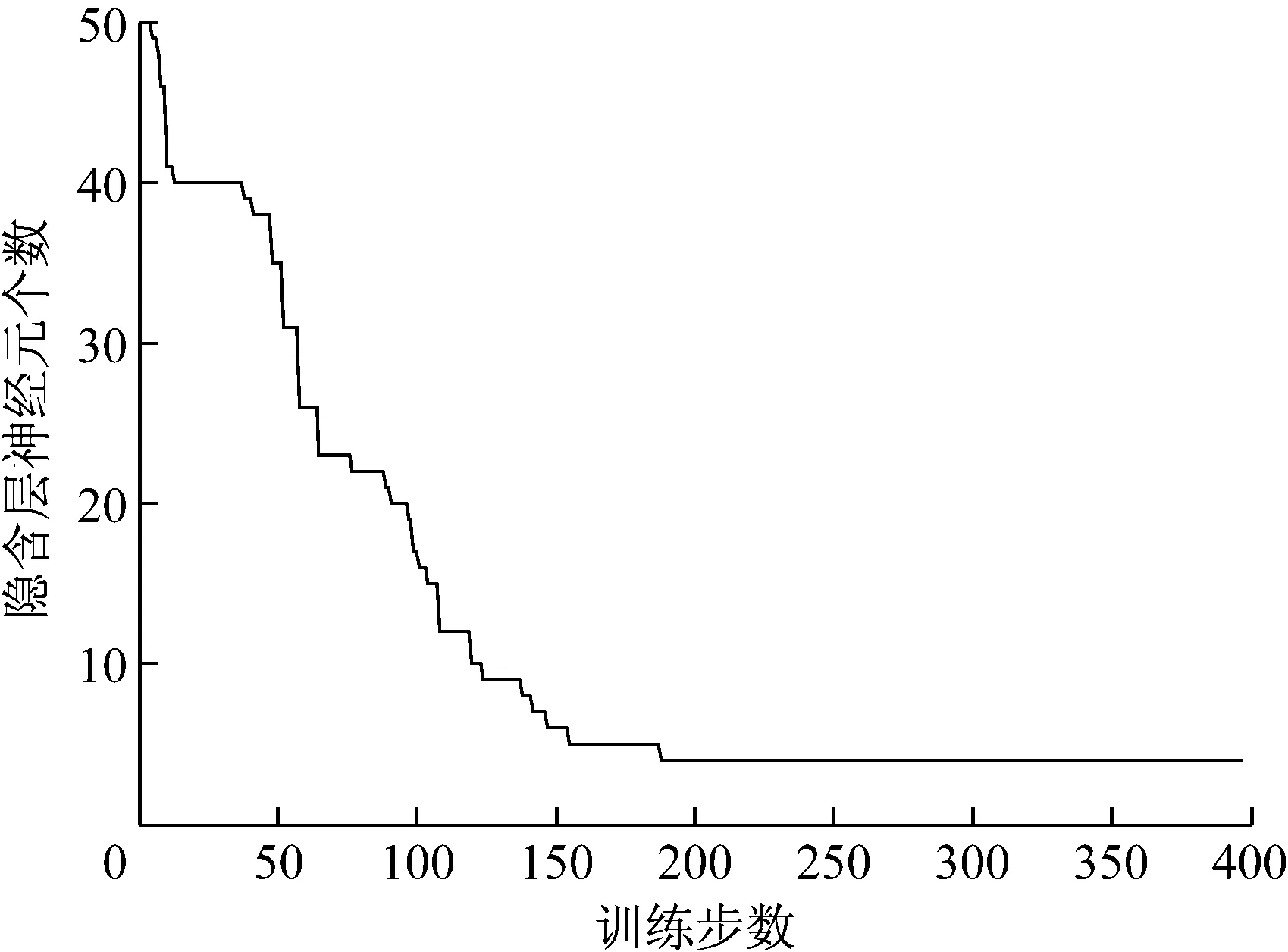
图4 隐含层神经元个数变化曲线
Fig.4 The change curve of the number of neurons in the hidden layer
隐含层神经元全局显著性变化曲线图5所示。
网络训练过程中阈值变化曲线如图6所示。

图5 隐含层神经元全局显著性曲线图

图6 删减阈值变化曲线图
网络训练过程中误差变化曲线如图7所示。

图7 网络训练误差曲线图
从图4隐含层神经元个数变化曲线看出经过神经网络修剪算法,隐含层结点个数呈下降趋势并最终达到稳定,实现了网络结构简单化。
删减阈值的设定影响网络的最终性能,因此,选择合适的网络阈值是十分的重要的,通过改进阈值,使得删减阈值随着隐含层节点个数的变化和显著性的变化实现动态调整。本文主要从自适应阈值和固定阈值、自适应修剪型网络和固定网络进行了比较分析,比较结果如表2、表3所示。

表2 自适应阈值和固定阈值对比结果
对比结果表明:从隐含层节点个数、误差值和识别率中自适应阈值在锚杆锚固缺陷识别中都优于固定阈值。
固定网络结构和自适应修剪型网络结构对比效果如表3所示。

表3 网络结构对比结果
表2和3对比结果表明:在对锚杆锚固缺陷识别中修剪型神经网络在网络结构和锚杆识别精度上都优于一般神经网络。
3.2 工程案例验证
表4为某隧道[16]锚固工程中14根锚杆采用质量动测法时加速度由小波包分析得到的各频带的能量分布;对采集到的锚杆锚固加速度信号进行3层小波包分解,其中,(3,0)~(3,7)表示由小波包分解得到的第三层低频到高频的8个频段,将其频段下的能量值归一化后作为神经网络的输入信号。由拉拔试验测得:对14根锚杆进行测试,其中前10根锚杆中,第9号锚杆在施加荷载至50 kN时,拔出锚杆,其低频成分信号能量变大,期望输出为(0,1),表示为不合格;其余9根锚杆的输出为(1,0),表示为合格。根据前10根锚杆测得的结果,将其分为正常锚杆和缺陷锚杆两类。样本集1~10号锚杆作为训练样本,11~14号锚杆作为测试样本,根据前10根锚杆的已知属性来进行判断和分类如表4所示。

表4 加速度各频带能量的分布
由于加速度频带能量值较大,在使用前需对其进行归一化处理,将归一化后的前10根锚杆数据作为自适应阈值前馈修剪型网络的训练样本,用待判别的后4根锚杆数据作为测试样本,并将测得的结果和前10根锚杆期望输出作比较判断其为正常锚杆还是缺陷锚杆。自适应阈值前馈修剪型网络预测得的结果和前人用BP网络预测的结果作对比,结果如表5所示。

表5 网络结构预测对比结果
测得的输出值几乎都为(1,0),所以后4根锚杆均为正常锚杆。与文献[16]中BP神经网络预测值对比准确度更高,分类效果更好。通过误差比较,修剪型神经网络的误差值明显降低,因此,修剪型神经网络对锚杆锚固的识别效果更高,精度更准。
本文分别从自适应阈值和固定阈值、自适应修剪型网络和固定网络结构对工程案例中的14组数据进行训练和测试,对比结果如表6和表7所示。

表6 自适应阈值和固定阈值对比结果

表7 网络结构对比结果
表6阈值比较、表7网络结构两个方面对比结果表明在锚杆锚固缺陷识别中自适应阈值前馈神经网络修剪算法在训练和测试时具有较高的识别效果和测试精度,并且能够简化网络结构,删除网络中的冗余节点。
4 结 论
本文在研究锚杆锚固缺陷识别的基础上,结合人工神经网络自组织、自学习能力的特点。提出一种自适应阈值前馈神经网络修剪算法对锚杆缺陷进行分类识别,通过模拟实验和工程实例对该算法进行了验证,得出以下结论:
自适应阈值修剪算法可以根据显著性指数和隐含层节点个数的变化动态地调整网络结构,删除网络中贡献值较小的隐含层节点,提高其泛化能力。在对锚杆锚固缺陷识别中,通过从阈值和网络结构两面对比,自适应修剪算法识别精度更高,误差更小。
[1] 贺若兰, 张平, 刘宝琛. 锚杆拉拔试验的理论和数值分析[J]. 岩土力学, 2006(增刊2): 855-859.
HE Ruolan, ZHANG Ping, LIU Baochen. Theoretical and numerical analysis of bolt pullout test[J].Rock and soil mechanics, 2006(Sup2): 855-859.
[2] 朱自强, 何现启. 全长锚固锚杆拉拔试验研究[J]. 探矿工程(岩土钻掘工程), 2005(增刊1): 115-118.
ZHU Ziqiang, HE Xianqi.Study on pullout test of full size anchoring bolt[J].Exploration Engineering (Rock & Soildrilling and Tunneling),2005(Sup1): 115-118.
[3] 蒋剑雄. 在桩基检测中低应变反射法与钻孔取芯法的应用[J].广西城镇建设,2008(8):268-269.
JIANG Jianxiong. Application of low strain reflection method and drilling core method in pile foundation detection[J].Urban Construction in Guangxi, 2008(8):268-269.
[4] THUMER H F. Boltometer-instrument for non-destructive testing of grouted rock bolts[C]//2nd International Symposium onFiled Measurements in Geomachanices. Rotterdam,1988.
[5] 汪明武, 王鹤龄. 锚固质量的无损检测技术[J].岩石力学与工程学报,2002,1(21):126-129.
WANG Mingwu, WANG Heling. Nondestructive testing technique of anchorage quality[J].Chinese Journal of Rock Mechanics and Engineering, 2002,1(21):126-129.
[6] 汪明武, 王鹤龄. 声频应力波在锚杆锚固状态检测中的应用[J].地质与勘探,1998,4(34):56-58.
WANG Mingwu, WANG Heling. The application of audio frequency stress wave in theanchoring of state detection[J]. Geology and exploration, 1998,4(34):56-58.
[7] 汪明武, 王鹤龄, 罗国煜, 等. 锚杆锚固质量无损检测的研究[J].工程地质学报,1999,1(7):72-76.
WANG Mingwu, WANG Heling, LUO Guoyu, et al. Research on nondestructive testing of anchorage quality of anchor bolts[J].Journal of Engineering Geology, 1999,1(7):72-76.
[8] 李义, 王成. 应力反射波法检测锚杆锚固质量的实验研究[J].煤炭学报,2000,2(25):160-164.
LI Yi, WANG Cheng. Experimental study on the detection of anchorage quality of anchor rod by stress reflection wave method[J].China Coal Society, 2000,2(25):160-164.
[9] 王猛, 李义, 董嘉. 应力波法锚杆锚固质量无损检测现场实验研究[J]. 煤炭技术, 2013, 32(1): 203-204.
WANG Meng, LI Yi, DONG Jia.Field experimental study on ondestructive testing of anchorage quality of anchor bolt by stress wave method[J]. China Coal Society, 2013, 32(1): 203-204.
[10] LE C Y, DENKER J S,SOLLA S A. Optimal brain damage[C]// Advances in Neural Information Processing System.San Mateo,CA:Morgan Kauffman,1990,2:598-605.
[11] HASSIBI B, STROK D G. Second order derivativs for network pruning:optimal brain surgeon[C]// Advances in Neural Information Processing System.San Mateo,CA:Morgan Kauffman,1993,5:164-171.
[12] 李倩, 王永县, 朱友芹.人工神经网络混合剪枝算法.清华大学学报(自然科学版),2005,45(6):831-834.
LI Qian, WANG Yongxian, ZHU Youqin. Hybrid pruning algorithm for artificial neural network training[J].Journal of Tsinghua University(Natural Science), 2005,45(6):831-834.
[13] PHILIPPE L, ERIC F, THIERRY A M. A node pruning algorithm based on a Fourier amplitude sensitivity test method[J]. IEEE Transactions on Neural Networks, 2006, 17(2): 273-293.
[14] 乔俊飞, 李淼, 刘江. 一种神经网络快速修剪算法[J].电子学报,2010,4(38):831-834.
QIAO Junfei, LI Miao, LIU Jiang. A fast pruning algorithm for neural networks[J]. Chinese Journal ofelectronics, 2010,4(38):831-834.
[15] 乔俊飞, 张颖. 一种多层前馈神经网络的快速修剪算法[J].智能系统学报,2008,3(2):206-210.
QIAO Junfei, ZHANG Ying. A fast pruning algorithm for multi layer feedforward neural networks[J]. CAAI Transactions on Intelligent Systems, 2008,3(2):206-210.
[16] 许明, 张永兴, 阴可. 某隧道锚杆完整性的无损检测方法[J]. 土木工程学报,2004,5(37):78-80.
XU Ming. ZHANG Yongxing, YIN Ke. Study on nondestructive detection of bolts’ integrality in a tunnel[J]. China Civil Engineering Journal, 2004,5(37):78-80.