考虑路面不平输入的车辆侧倾状态估计及主动控制
2018-03-28张亮修吴光强同济大学汽车学院上海0804上海市质量监督检验技术研究院上海0007东京大学生产技术研究所东京538505
张亮修, 周 静 ,成 强, 吴光强,3(. 同济大学 汽车学院, 上海 0804; . 上海市质量监督检验技术研究院, 上海 0007;3. 东京大学 生产技术研究所, 东京 53-8505)
引起车辆侧倾的原因主要有两个:一是驾驶员转向输入使得车辆曲线运动引起的侧倾,另一个是路面不平输入引起的侧倾,这两种侧倾在一定程度上是相互耦合的。利用摄像头、GPS等设备能够直接测量车辆侧倾角度或角速度[1-2],但存在测量困难或昂贵费用等问题。而借助车辆已有的传感器,基于动力学模型和估计理论进行车辆侧倾状态估计,并在此基础上进行侧倾控制具有重要研究价值。
国内外学者关于侧倾估计的研究主要基于侧向动力学模型。文献[3]开发一种主动防侧倾系统中的车辆变量实时估计算法,对侧倾角和车辆质心高度这些难以测量的变量进行估计。文献[4]分别基于三自由度模型和单自由度模型估计车辆状态,并且在线性域和非线性域内做了评价对比。文献[5]提出两种基于动力学的观测器用于车辆侧倾角和俯仰角估计,并且在车辆横摆角速度不为零时,证明了观测器的稳定性。作为经典的状态估计算法,Kalman滤波器被广泛应用于车辆质心侧偏角、轮胎力、路面附着系数等的估计。文献[6-7]提出基于扩展卡尔曼滤波的汽车全状态估计和预测方法,在模型里引入了路面坡度角和非线性悬架系统。文献[8]用Kalman滤波器估计侧倾状态来预防侧翻。车辆主动防侧倾控制根据所采用执行器不同主要分为5种,分别为四轮转向[9]、差动制动[10]、主动/半主动悬架控制[11]、主动横向稳定杆[12]、集成控制[13]。
目前关于车辆侧倾状态估计多采用侧向动力学模型来估计侧倾状态,没有考虑由路面不平输入导致悬架变形而引起的侧倾,因此当车轮左、右两侧存在不平激励时,估计并不准确。本文分别基于侧向动力学和垂向动力学设计侧倾状态估计方法,并利用滑模变结构控制输出车辆所期望的附加防侧倾力矩,通过阻尼可调减振器的阻尼力实现车辆主动防侧倾控制。
1 基于侧向动力学的侧倾状态估计
1.1 三自由度侧向动力学建模



图1 三自由度侧向动力学模型
考虑侧向、横摆和侧倾运动的三自由度侧向动力学模型运动方程如下


(1)

其中,侧向加速度ay表示为
(2)

(3)
其中,
f(x,u)=
C(x,u)=
1.2 基于侧向动力学的侧倾状态估计
为便于侧倾状态估计器设计,将式(3)用泰勒公式展开,只保留一阶项,得到线性化状态方程
(4)

wl为侧向动力学模型干扰噪声,vl为系统测量噪声,假定wl和vl为高斯白噪声,满足
式中,Ql,Rl,Nl为各自对应的协方差矩阵。

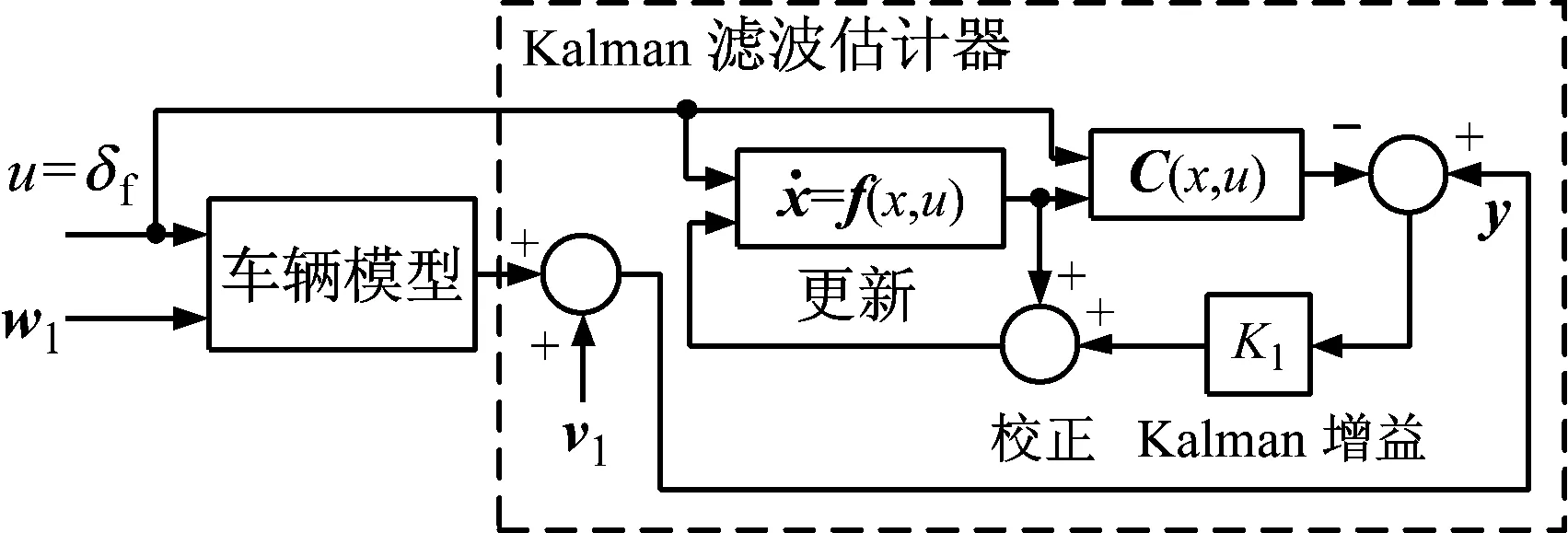
图2 Kalman滤波侧倾状态估计框图
Kalman滤波状态估计问题可以看作寻求下面目标函数的最小值问题[14]
∀k
(5)
s.t.(4)

对于xk估计的递归形式为
(6)

Kalman滤波估计问题的最优求解过程如下:
步骤1 初始化
· 状态变量初始化
(7)
·误差协方差初始化
(8)
步骤2 时间更新(预测)
· 状态预测
(9)
·误差协方差预测
Pk/k-1=APk-1/k-1AT+Q
(10)
步骤3 测量更新(校正)
· Kalman增益计算
Kk=Pk|k-1HT[HPk|k-1HT+R]-1
(11)
·状态估计
(12)
·估计的协方差
Pk|k=[I-KkH]Pk|k-1
(13)

基于上述最优求解过程,得到线性状态方程(4)在某一固定车速下的稳态Kalman增益
K(t)=P(t)HT(t)R(t)-1
(14)
P(t)通过求解误差协方差方程得到,即
A(t)P(t)+P(t)AT(t)+G(t)Q(t)GT(t)-
P(t)HT(t)R-1(t)H(t)P(t)
(15)
式(15)也称为矩阵黎卡提微分方程。
将求得的增益施加到线性状态方程(6),即得到
(16)
2 基于垂向动力学的侧倾状态估计
车轮左、右两侧的路面不平输入也会引起车辆侧倾,而路面不平引起的侧倾无法通过侧向动力学模型来估计,需要借助垂向动力学模型。
2.1 七自由度垂向动力学建模
七自由度垂向动力学模型包括簧上质量和簧下质量,其中,簧上质量具有垂向运动、侧倾和俯仰三个自由度,簧下质量具有四个垂向运动自由度,如图3所示。

图3 七自由度垂向动力学模型
七自由度垂向动力学方程如下
(17)
其中,
Av=
式中:ms为簧上质量;mu为簧下质量;zs,φ,θ分别为簧上质量的垂向位移、侧倾角和俯仰角;z2,fl,z2,fr,z2,rl,z2,rr分别为簧上质量左前、右前、左后、右后四个位置的垂向位移;z1,fl,z1,fr,z1,rl,z1,rr分别为簧下质量左前、右前、左后、右后四个位置的垂向位移;zg,fl,zg,fr,zg,rl,zg,rr分别为左前、右前、左后、右后四个车轮的垂向输入;Ix1为簧上质量侧倾转动惯量;Iy为簧上质量俯仰转动惯量;ksf,ksr为前、后悬架的刚度系数;csf,csr为前、后悬架阻尼系数;ktf,ktr为前、后轮胎刚度系数;a,b分别为整车质心到前轴距离、整车质心到后轴距离;d为轮距。
当侧倾角较小时,满足
(18)

2.2 基于垂向动力学的侧倾状态估计
装备动态底盘控制(Dynamic Chassis Control,DCC)系统的车辆在左前(FL)、右前(FR)和左后(RL)位置分别装有垂向加速度传感器[16]。为了更准确的实现车辆侧倾状态估计,车辆右后(RR)的垂向加速度信号可以通过右前(FR)的加速度信号延迟得到,即
(19)
(20)

在得到垂向加速度后,簧上质量左前、右前、左后、右后四个位置的垂向速度通过以下滤波器得到
(21)
式中:ζ=0.707,ωn=0.1 Hz,ij={fl,fr,rl,rr}。
由垂向动力学估计得到的侧倾角和侧倾角速度为
(22)
(23)
3 主动防侧倾控制
一定程度的车身侧倾能够帮助驾驶员判断行车环境,而过大的车身侧倾则会引起驾驶员不适,甚至造成侧翻危险。如图4所示,基于估计得到的侧倾角和侧倾角速度,设计滑模变结构控制器来输出车辆所期望的主动防侧倾力矩,通过阻尼可调减振器的阻尼力实现车辆主动防侧倾控制。

图4 主动防侧倾控制框图
3.1 主动防侧倾力矩决策
包含附加侧倾力矩的动力学方程为
(24)
式中:Mu为附加防侧倾力矩。
以侧倾角φ为控制目标,假设期望输出侧倾角为φdes,则跟踪误差e为
e=φdes-φ
(25)
利用滑模变结构控制算法[17]得到主动防侧倾力矩,定义积分滑模面
(26)
则上式可以写成

(27)
式中:k1和k2为非零正常数。理想状态下,输出侧倾角为φdes=0,则对滑模面s进行求导,可得
(28)
同时,结合式(24)可得:
(29)

为保证滑模动态品质,选取指数趋近律作为接近条件

(30)
式中:ε,c为大于零的常数。
综合式(26)、(29)与(30),可得:
(31)
由此可得,使簧上质量回到预期侧倾角所需的附加力矩为

ε·sgn(s)]
(32)
这里k1=2,k2=1,ε=0.05,c=1。
下面给出滑模控制器的稳定性证明。定义李雅普诺夫函数为
(33)
则
(34)
将式(32)控制律代入上式,得到

-(cs2+ε·s·sgn(s))≤-(c+ε)s2≤0
(35)
为了削弱滑模控制自有的抖振现象,在控制中引入准滑动模态控制,即用饱和函数sat(s)代替符号函数sgn(s)

(36)
其中,Δ称为“边界层”。上述处理的本质为:在边界层外,采用切换控制,在边界层内采用线性化反馈控制,这里Δ取0.01。
3.2 阻尼可调减振器阻尼力计算
上面所得附加力矩是将簧上质量的侧倾角调整为预期值的理想附加力矩。而对于阻尼可调减振器而言,附加力矩是通过调节左、右阻尼力的大小及差异实现的,在某一瞬间能够产生的附加阻尼力矩受两个因素的限制:① 是左、右两侧簧上质量与簧下质量相对运动的速度,在相同阻尼的情况下,相对运动速度越大,产生阻尼力越大,从而产生的防侧倾力矩也越大,但对于车辆而言应该尽可能的控制簧上质量与簧下质量的相对运动速度在较小范围内;② 是调节阻尼的励磁电流受客观制约不可能无限大,在本文中限定最大电流为1.6 A。因此,在得到期望附加力矩Mu的基础上,首先对各减振器的输出阻尼力进行计算,然后根据阻尼可调减振器特性得到期望的控制电流。
由于主要对侧倾进行控制,故在决策当中让位于同一侧的前、后减振器输出相同的阻尼力,具体决策过程如下[18]

(37)
(38)

(39)
(40)
式中,Fd,fl,Fd,rl,Fd,fr,Fd,rr分别为车辆左前、左后、右前、右后四个减振器的动态阻尼力;df,dr分别为前、后轴轮距。
3.3 阻尼可调减振器控制电流
如图5所示为根据减振器台架试验得到阻尼可调减振器特性曲线,在得到期望的减振器阻尼力后,再根据此时减振器的相对速度,通过查表和插值的方式就可以得到对应的控制电流。
需要说明的是,前减振器的电流变化范围为0.29~1.6 A,后减振器的电流变化范围为0.32~1.6 A,前减振器的阻尼力调节范围比后减振器大,这与乘用车重心位置靠前和整车操稳性需求一致。减振器阻尼力的连续调节,能够实时精确地实现防侧倾控制。

(a) 前减振器阻尼特性

(b) 后减振器阻尼特性
4 仿真验证
4.1 仿真参数及仿真工况设置
本文提出的方法在MATLABSimulink环境进行仿真验证,主要参数如表1所示。
为全面验证本文方法,设置两种仿真工况。
工况1参考ISO 3888—1:1999双移线工况[19],车速为100 km/h,不考虑路面不平输入。
工况2参考ISO 3888—1:1999双移线工况[19],车速为100km/h,考虑路面不平输入,采用滤波白噪声[20]作为路面输入模型,即:
(41)
式中:zg为路面垂向位移(m);G0为路面不平度系数(m3/cycle);vx为车速(m/s);w(t)为数字期望为零的高斯白噪声,左、右两侧车轮采用不同功率强度的白噪声输入;f0为下截止频率(Hz)。
4.2 侧倾状态估计仿真验证
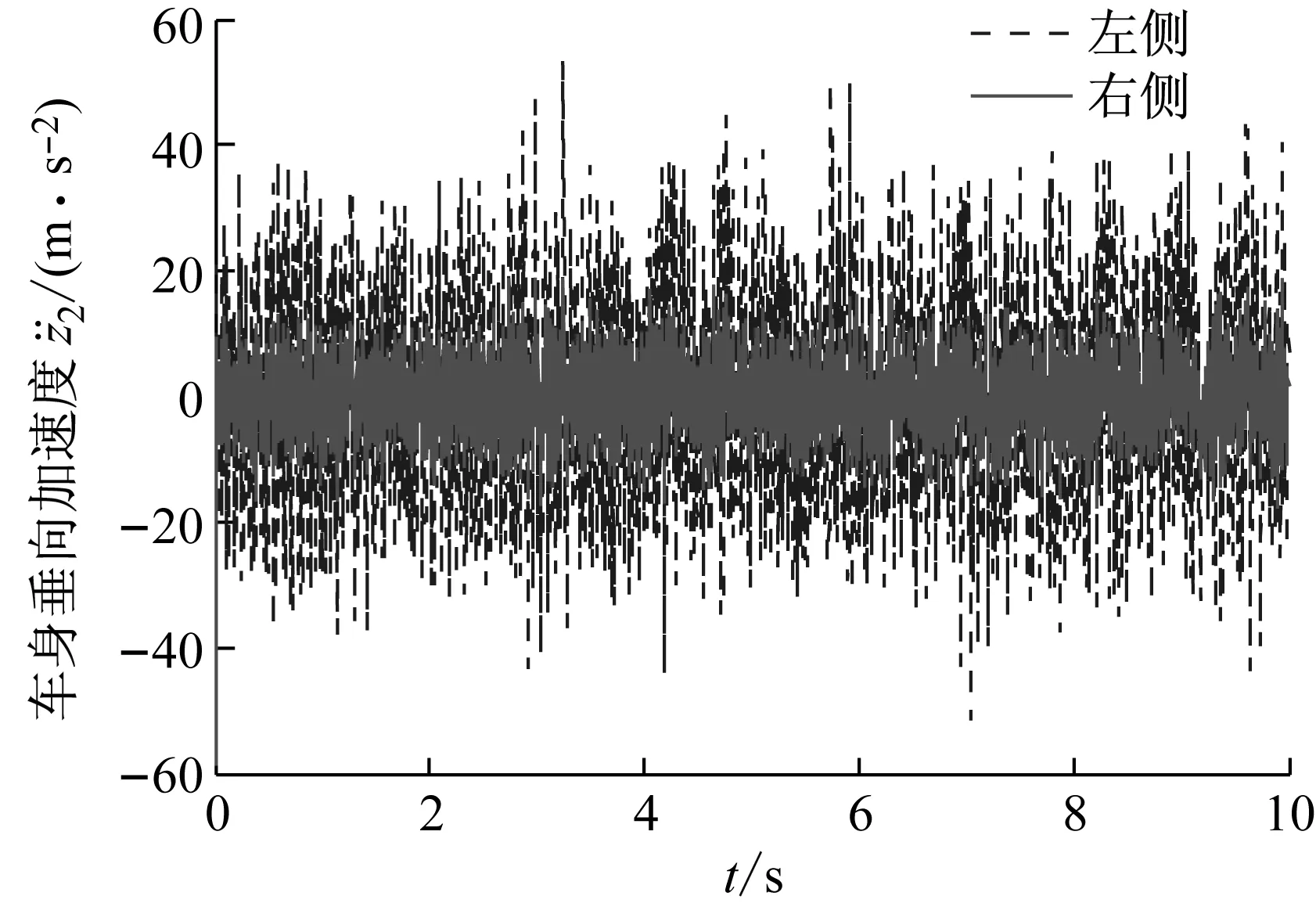
图6给出了在不考虑路面不平输入时的侧倾估计结果。图6(a)为车辆前轮转角输入,其中虚线为考虑传感器测量噪声后的测量值;图6(b)和6(c)为Kalman滤波侧倾估计过程中的侧向加速度和横摆角速度,其中虚线为考虑传感器测量噪声后的测量值;图6(d)和6(e)为侧倾状态估计结果,其中虚线为基于侧向动力学的侧倾估计结果,点划线为基于垂向动力学的侧倾估计结果,可以看出,两种方法都能够较好地实现车辆侧倾状态估计。

表1 主要参数
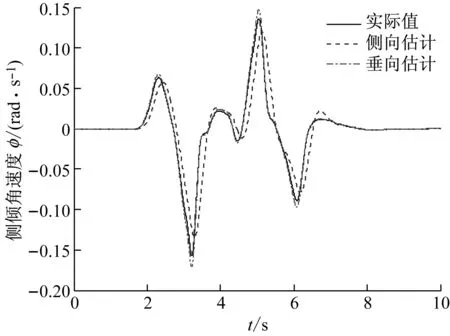
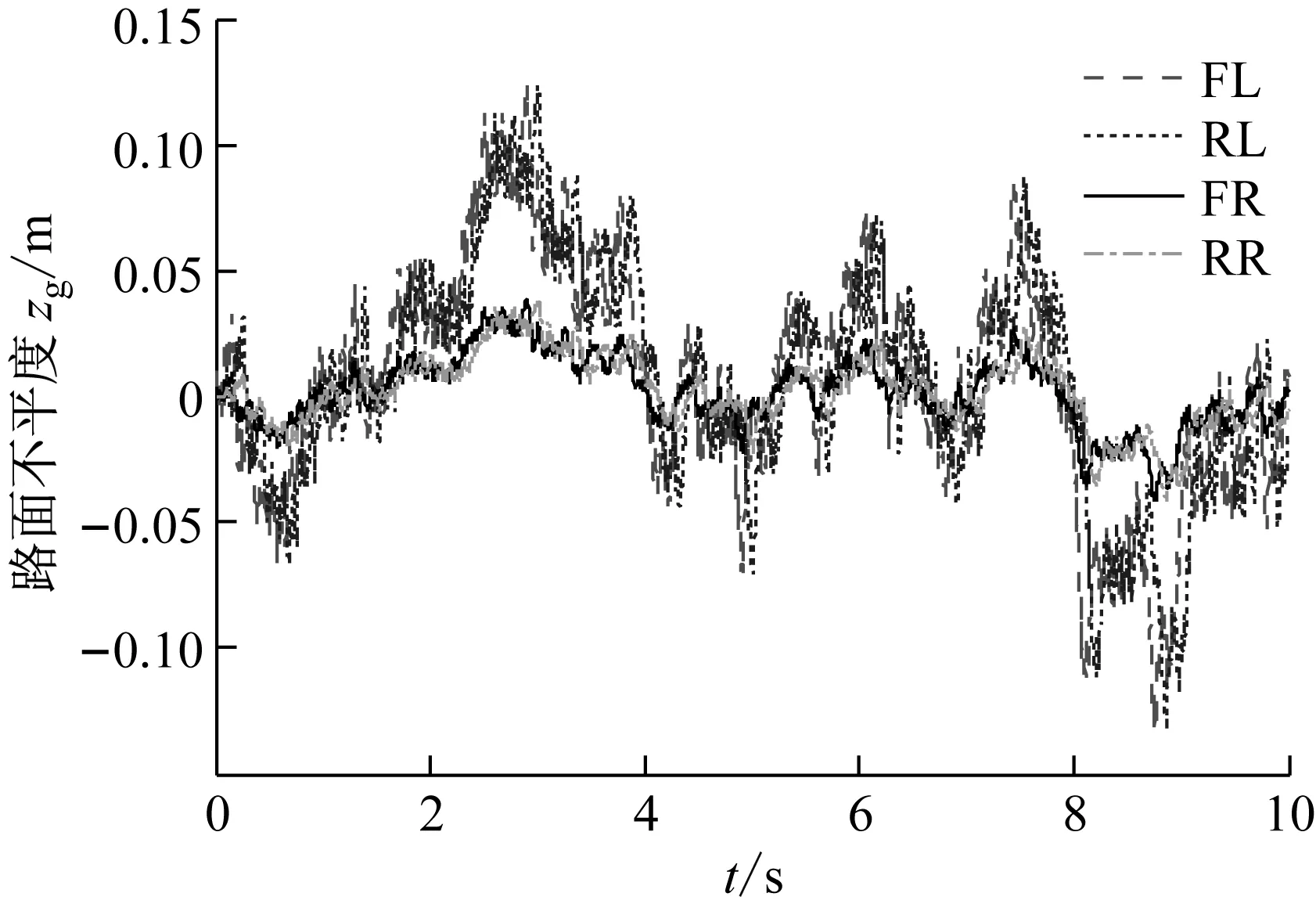
图7给出了考虑路面不平输入时的侧倾状态估计结果。图7(a)为路面不平度输入,左、右两侧车轮采用不同功率强度的白噪声输入,左侧车轮输入的白噪声功率为0.1,右侧车轮输入的白噪声功率为0.01,并且考虑了前、后轮的输入延迟;图7(b)和7(c)悬架变形量和车身垂向加速度,由于左侧路面白噪声输入要大于右侧白噪声输入,所以左侧的悬架变量变形量和车身垂向加速度要大于右侧。图7(d)和7(e)为侧倾状态估计结果,可以看出,在考虑路面不平输入时,基于侧向动力学的估计结果与实际值差别较大,而基于垂向动力学得到的侧倾估计结果与实际值相吻合。
为了进一步量化估计效果,采用均方根误差(Root Mean Square Error, RMS)来衡量两种估计方法,误差指标如下
(42)
(43)

(a) 前轮转角

(b) 侧向加速度

(c) 横摆角速度

(d) 侧倾角度
(e) 侧倾角速度
(a) 路面不平输入

(b) 悬架变形量
(c) 车身垂向加速度

(d) 侧倾角度

(e) 侧倾角速度


表2 侧倾状态估计误差
表2列出了图6(d)、6(e)、7(d)、7(e)中的量化估计误差,可以看出,在不考虑路面不平度输入时,基于侧向动力学和垂向动力学估计的侧倾状态RMS值均较小,估计较为准确。在考虑路面不平输入后,基于侧向动力学估计方法的RMS值要远远大于垂向动力学估计的RMS值,这说明当前轮转角和路面不平同时存在时,单纯使用侧向动力学模型不足以准确估计侧倾状态。基于垂向动力学的估计方法在两种工况下都可以得到满意地估计效果。
4.3 主动防侧倾控制仿真验证
图8和图9给出了主动防侧倾控制的对比结果。可以看出,在不考虑路面不平输入和考虑路面不平输入两种工况下,本文设计的主动防侧倾控制算法都能够有效地控制车辆的侧倾角度和侧倾角速度,通过控制阻尼可调减振器的阻尼力起到主动防侧倾控制的效果。
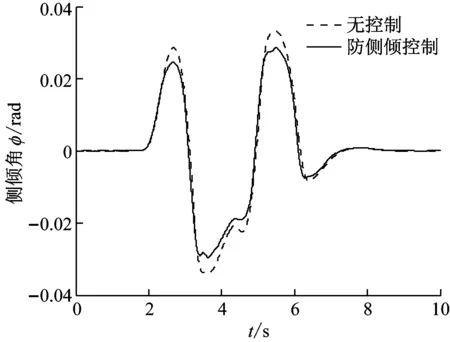
(a) 侧倾角度
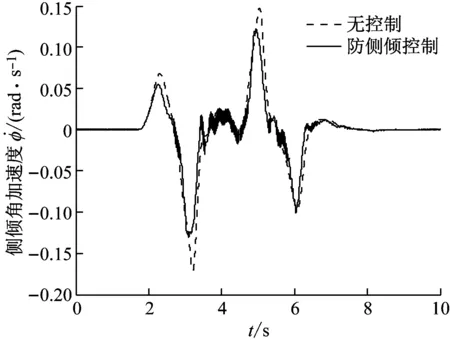
(b) 侧倾角速度
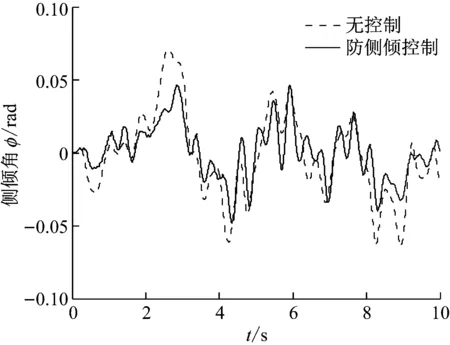
(a) 侧倾角度

(b) 侧倾角速度
5 结 论
(1) 建立三自由度侧向动力学模型,利用Kalman滤波算法设计基于侧向动力学的车辆侧倾状态估计算法,该方法在仅考虑驾驶员转向输入时具有较好地估计效果。
(2) 建立七自由度垂向动力学模型,借助车辆已有的车身加速度传感器信号,设计基于垂向动力学的车辆侧倾状态估计算法,该方法能够有效地估计由驾驶员转向输入和路面不平度输入引起的车辆侧倾状态。
(3) 设计滑模变结构控制方法决策车辆所期望的附加防侧倾力矩,通过阻尼可调减振器的阻尼力实现车辆主动防侧倾控制。
(4) 仿真结果表明,所提出的方法能够准确估计由前轮转角和路面不平引起的侧倾状态,并能有效地控制车辆侧倾。
[1] BEVLY D M, RYU J, GERDES J C. Integrating INS sensors with GPS measurements for continuous estimation of vehicle sideslip, roll, and tire cornering stiffness[J]. Intelligent Transportation Systems IEEE Transactions on, 2007, 7(4):483-493.
[2] SCHUBERT P J, NICHOLS D, WALLNER E J, et al.Electronics and Algorithms for Rollover Sensing[C]. SAE Technical Paper,2004.
[3] RAJAMANI R, PIYABONGKARN D, TSOURAPAS V, et al. Parameter and state estimation in vehicle roll dynamics.[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4):1558-1567.
[4] RYU J, MOSHCHUK N K, CHEN S K. Vehicle State Estimation for Roll Control System[C]// Proceedings of the American Control Conference. New York, 2007.
[5] TSENG H E, XU L, HROVAT D. Estimation of land vehicle roll and pitch angles[J]. Vehicle System Dynamics, 2007, 45(5):433-443.
[6] HSU L Y, CHEN T L. Vehicle full-state estimation and prediction system using state observers[J]. IEEE Transactions on Vehicular Technology, 2009, 58(6):2651-2662.
[7] DAHMANI H, CHADLI M, RABHI A, et al. Vehicle dynamic estimation with road bank angle consideration for rollover detection: Theoretical and experimental studies[J]. Vehicle System Dynamics, 2013, 51(12):1853-1871.
[8] PARK J I, YOON J Y, KIM D S, et al. Roll state estimator for rollover mitigation control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2008, 222(222):1289-1312.
[9] FURLEIGH B D D, VANDERPLOEG M J, OH C Y. Multiple steered axles for reducing the rollover risks of heavy articulated trucks[C].SAE Technical Paper, 2012.
[10] YOON J, YI D K K. Design of a rollover index-based vehicle stability control scheme[J]. Vehicle System Dynamics, 2007, 45(5):459-475.
[11] CHERIAN V, SHENOY R, STOTHERT A, et al. Model-based design of a SUV anti-rollover control system[C]. SAE Technical Paper, 2008.
[12] DAVID J M, SAMPSON D C. Active roll control of single unit heavy road vehicles[J]. Vehicle System Dynamics, 2003, 40(4):229-270.
[13] LU S B, LI Y N, CHOI S B. Contribution of chassis key subsystems to rollover stability control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2012, 226(4):479-493.
[14] DOUMIATI M, CHARARA A, VICTORINO A, et al. Vehicle dynamics estimation using Kalman filtering[M].Hoboken: Wiley, 2015.
[15] TSENG E. Vehicle dynamics control[M]. London: Springer, 2015.
[16] VOLKSWAGEN D C C. Adaptive chassis control—Design and Function[EB/OL].[2016-01-15].http://www.my-gti.com/2653/volkswagen-dcc-adaptive-chassis-control-design-and-function.
[17] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京:清华大学出版社,2005.
[18] 张亮修, 杨家颖, 吴光强. 考虑侧倾的半主动悬架与电子稳定控制系统集成控制[J]. 同济大学学报, 2016,44(3): 402-410.
ZHANG Liangxiu, YANG Jiaying, WU Guangqiang. Integrated control based on semi-active suspension and electronic stability control system considering active roll control[J].Journal of Tongji University, 2016,44(3): 402-410.
[19] International Organization for Standardization: ISO 3888-1[S]∥Passenger cars—Test track for severe lane-change manoeuvre, Part 1: Double lane-change,1999.
[20] 喻凡, 林逸. 汽车系统动力学(普通高等教育十五国家级规划教材)[M]. 北京:机械工业, 2012.