基于Simulink的换道防碰撞预警建模与仿真分析
2018-03-14后士浩晏晓娟
张 凯,刘 军,后士浩,晏晓娟
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
考虑到换道车辆与周围车辆的位置关系,不当的换道时机可能会导致换道车辆与周围不同位置的车辆发生不同形式的碰撞。在碰撞条件方面,换道过程同时涉及纵向及横向运动,若单一考虑纵向碰撞的时间和位置,并不能准确反映换道碰撞危险[1]。在预警条件上,由于换道工况的不同,换道安全距离的要求及换道安全性的需求也不同。所以,本文从换道轨迹、换道意图、换道安全预警距离3方面研究了换道车辆防碰撞预警规则。
1 换道轨迹分析和换道意图识别

图1 连续换道示意图
连续的车辆换道如图1所示,即a—b—f—c—d—e,并分为以下几个明显的阶段:换道准备阶段(a—b)、换道横移阶段(b—d)以及调整阶段(d—e)。其中:ta为换道开始时刻;tb为换道横移开始时刻,并设为0;tf为压线时刻;tc为碰撞临界时刻;td为横移结束时刻;te为换道结束时刻。为方便换道横移过程分析,本文设tb为0,并设整个横向移动持续时间为T,即T=td。如图1设置运动轨迹参考坐标系。
根据换道结束时车辆横向速度、横向加速度均为0的情况,本文采用正弦函数表达横向加速度,同时采用匀加速运动表征纵向运动,由此进行换道轨迹研究。设要完成换道行为所必须的横向位移为1个车道的宽度H,则车辆换道期间的横向加速度为
(1)
通过正弦波形对对应换道过程整个横向位移H和横向加速度函数ay(t)的积分关系可推导出系数A,代入式(1)得:
(2)
图2为换道过程中横向加速度的变化情况。考虑到驾驶舒适性,可以对横向加速度积分,得到换道车辆在横向位移的轨迹模型:
(3)
其中:H为换道的总横向位移;T为整个横向移动持续时间,即横向加速度由开始到结束的时间。换道车辆的横向位移变化情况如图3所示。
同时设在t时刻,汽车行驶路径的切线方向与道路纵向(即规定X轴的正方向)的夹角为θ(t),即航向角,可以得到
(4)
其中:vy(t)为前车沿Y轴的横向速度;vx(t)为前车沿X轴的纵向速度。
由式(4)可知,换道轨迹与横向位移H、纵向加速度ax、换道横向移动持续时间T以及车辆换道初始速度vx(0)相关。
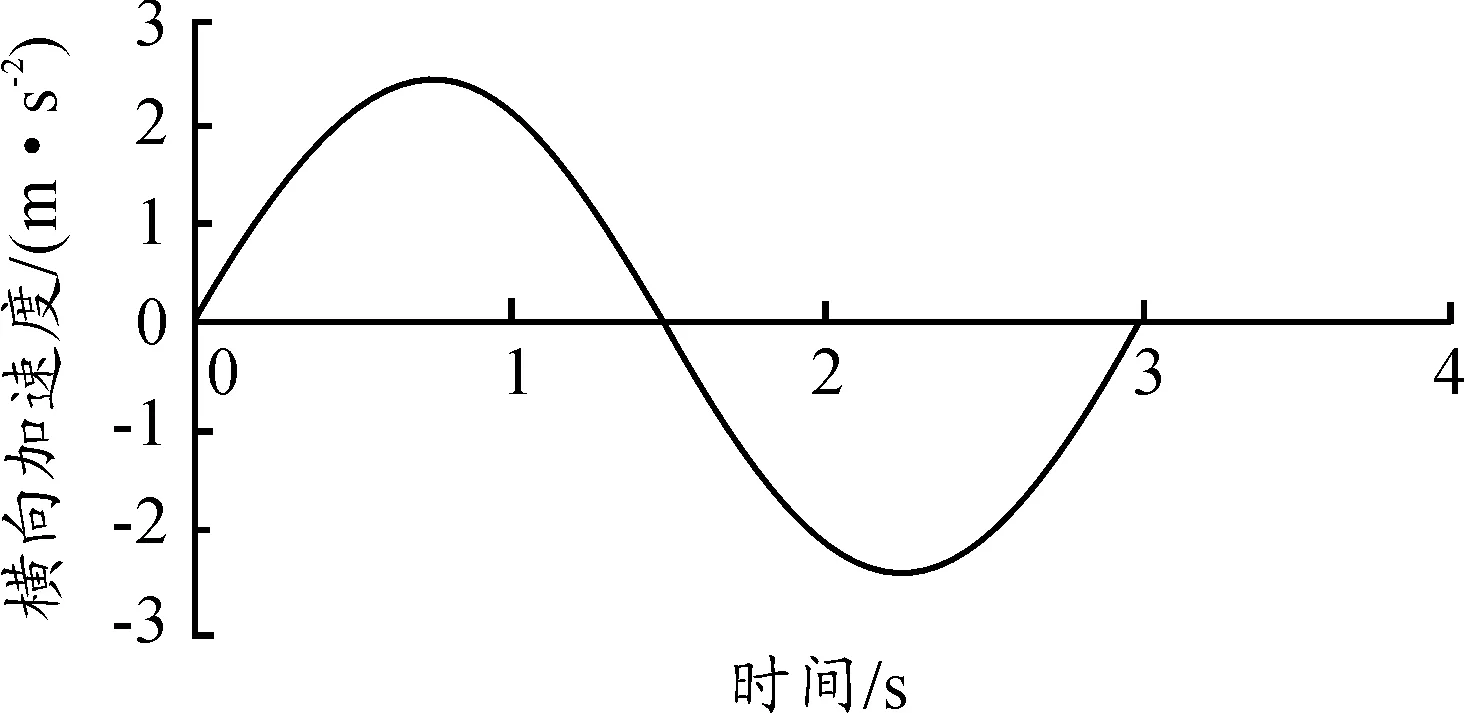
图2 换道过程中横向加速度的变化情况
虽然转向灯是换道行为最明显的信号,但转向灯的启用率不高,所以需要寻找其他辅助参数来识别换道意图。这里提出用预测车辆压线时间TLC(time to lane cross)作为换道意图识别的辅助表征参数。因为当车辆偏离原行驶方向并向一侧车道线靠近时即说明存在换道的可能性,所以不管有意识地换道或是无意识偏离原行驶方向,行驶一段时间后,后侧后方的车辆都会对本车造成碰撞危险[2],所以以车辆压线时间TLC作为换道意图识别的辅助表征参数在理论上是行之有效,如图4所示。
2 换道安全预警距离模型
如图5所示,换道开始后,车辆A的左下角点p2运动到与车辆B右边缘切线L1的延长线处,将此交点设置为换道横向碰撞临界点C。根据车辆A与车辆B的危险换道分析,在C点之前车辆A易与车辆B发生侧向刮擦。若C点之前未发生碰撞,A车即能安全进入目标车道中,在跟车安全距离范围内车辆B也有足够时间应对前方情况,所以将极大程度上避免追尾的发生。基于以上情况,建立换道安全预警距离模型。
如图5所示,若换道初始时刻A车左边缘切线L2与B车右边缘切线L1的横向距离为hc,则A车左下角p2与A车左上角点p1位置关系如下:
(5)
其中:yA(t)、xA(t)分别为点p1的横坐标与纵坐标;yp2(t)、xp2(t)分别为点p2的横坐标与纵坐标;lA为A车长;θ(t)为车辆A换道过程中轨迹切线与车道线所形成的夹角。可以推出p2的换道横向轨迹为:
(6)
换道安全预警距离是指换道车辆从原始车道向目标车道进行横向位移前,为了保证换道安全车辆必须保持的本车车尾与侧后方车辆的行车间距。如果车辆与侧后方车辆的行车间距能保持在这个距离以上,则不会发生换道碰撞;反之则有很大可能发生碰撞。因此,应为两车预留出合适的跟车安全距离[3],为换道过程留下制动反应距离。换道安全预警距离模型包括碰撞安全距离模型和跟车安全距离模型。
2.1 碰撞安全距离模型
根据p2点的换道轨迹可求得到达横向碰撞临界点的时间,代入航向角得到:
(7)
其中hc为车辆A左侧边缘与车辆B右侧边缘的距离。T可根据换道初始横向加速度确定取值范围,求解方程可获得碰撞时刻tc。
为避免在车辆A到达临界碰撞点C之前发生碰撞,在此过程中需要满足:
xA(t)+lA+DAB(0)≥xB(t)+lA·cos(θ(t))
(8)
式中:DAB(0)为车辆A与车辆B的初始纵向间距;xA(t)、lB(t)分别为车辆A、B在换道过程某t时刻的纵向位移;θ(t)为换道t时刻的航向角;lA为车辆A的长度。式(8)可改写为:
DAB(0)≥max{xB(t)-xA(t)+lA·cos(θ(t))-lA}
(9)
(10)
根据数学模型可见,本研究主要涉及到达横向临界碰撞点的时间tc与车辆A加速至车辆B速度的时间teq的比较,具体碰撞安全距离为
(11)
式中axA为车辆A的加速度。由式(11)可知:碰撞安全距离与换道初始时两车碰撞时间、相对加速度和相对速度有关。
2.2 跟车安全距离模型
由于两车以一定的相对速度跟随行驶,两车间距与后车速度呈线性关系[4],因此建立跟车安全距离模型:
Df=vxB(0)td+Dc
(12)
式中:Df表示跟车安全距离;td表示车辆B的制动迟滞时间,一般取1.2 ~2.0 s;Dc表示车辆B停止时的心理安全距离,一般取2~5 m。
叠加以上碰撞安全距离Dc和跟车安全距离Df,得到最终的换道安全预警距离模型:
Dsafe=Dc+Df
(13)
3 危险与安全时间阈值确定
TTC(time to collision)为两车按照当前状态继续行驶所需的碰撞时间。由于换道操作是一个复杂的过程,涉及本车以及其他车辆的信息等多方面信息的综合处理,所以本文从不同的方面引入不同的TTC作为表征换道安全与危险的时间阈值。
3.1 动态碰撞时间阈值
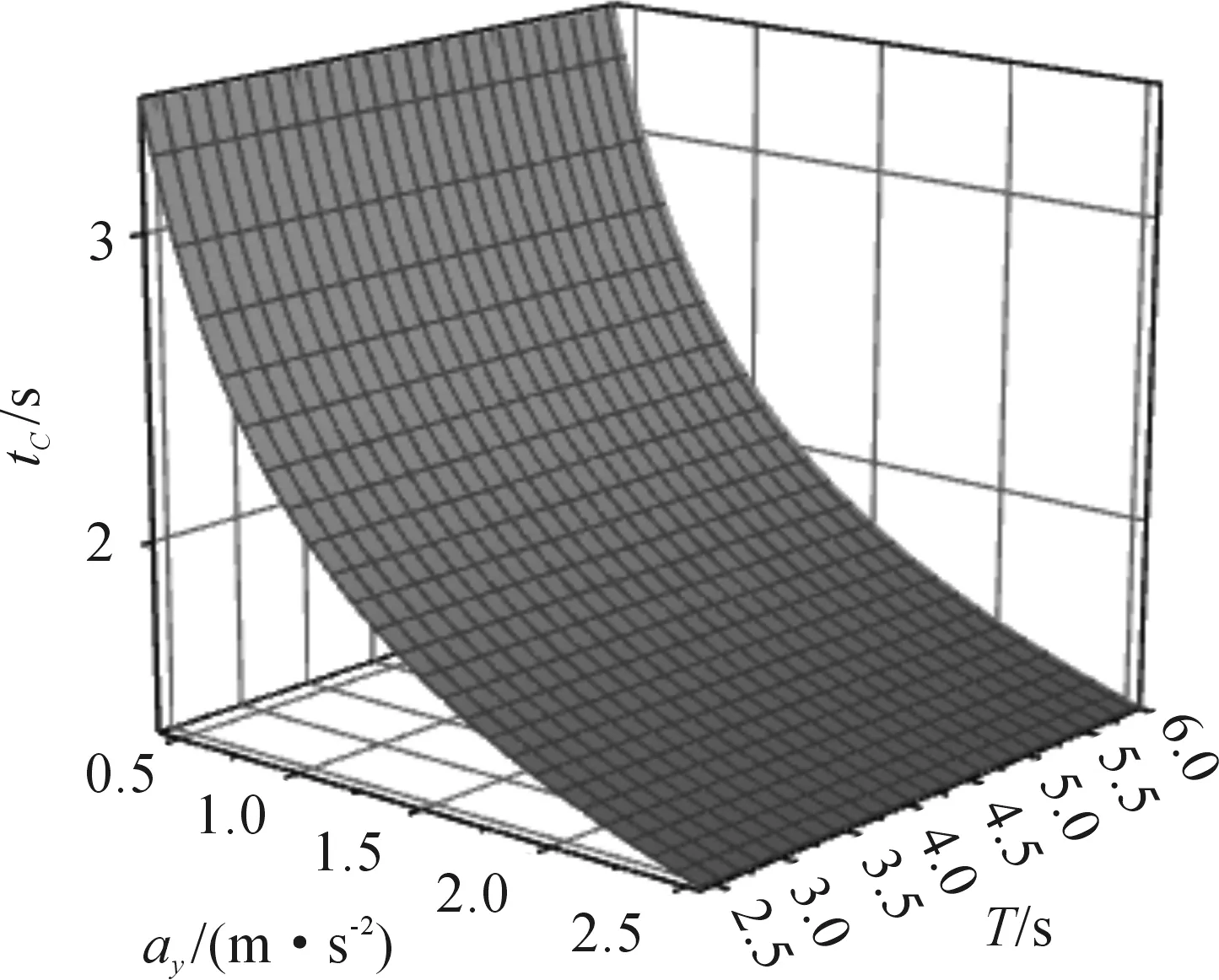
图6 横向加速度ay,横移时间T与横向碰撞时间tc的关系
一方面,通过换道轨迹模型可知:换道期间对轨迹的预测与ay、T密切相关,这里根据实车实验测得每次换道开始0.5 s时的ay以及加速换道均在6 s左右实现这一事实,对T与ay的对应关系建立ay-T模型。根据一般加速换道横向位移为一个车道宽度(H=3.5 m)确定T,再将其代入到点p2的换道横向轨迹中即可预测到达碰撞临界点的时间tc。具体行车环境下不同ay、T与tc的关系如图6所示。
另一方面,通过相对速度与换道纵向加速度的关系获得teq,然后对比tc与teq大小确定动态碰撞时间阈值TTC1,利用该时间值计算出安全预警距离对比值D1。
3.2 固定预警时间阈值
由于危险换道在实车试验中难以进行,故本文参考BOSCH专利及ISO标准中的预警阈值[5]进行研究,如表1所示。
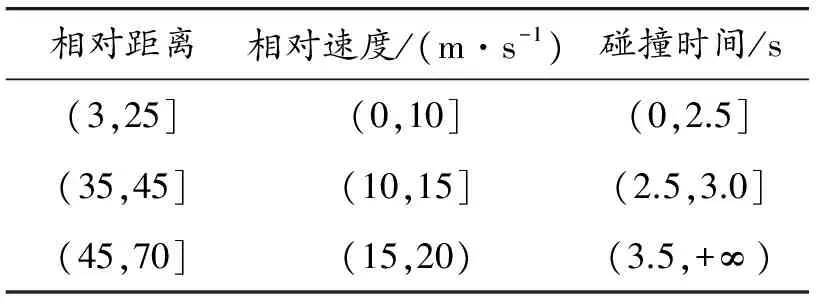
表1 BOSCH专利及ISO标准的换道预警规则
由表1可知:预警规则是通过划分换道过程中两车的相对距离、测得该距离范围内的相对速度以及取边界值计算来确定相应的TTC值,从而判断车辆是否处于危险与安全状态。但由于国内交通环境及驾驶操作特性有别于国外,因此上述预警规则不能直接应用于国内。根据换道辅助系统对预警时间的要求,需要提前一定时间向驾驶员提出警示。结合国内外普遍采用的预警时间,本文将3 s作为表征危险状态与警告状态的固定预警时间阈值TTC2。同样利用该时间值计算出安全距离对比值D2。
4 换道安全距离模型对比及换道预警规则
为了提高换道效率和道路通行能力,本文采用在侧后方车辆速度大于本车速度情况下基于换道安全距离的换道预警规则。
在换道车辆A以vx=11.11(m·s-1)换道的情况下,以不同的横向加速度ay∈[1.64,0.41]换道,同时后侧方车辆以不同相对速度Δvx接近。根据teq与tc来确定D1的取值。由图7(a)可见:黄色曲面为D1(tc),绿色面为D1(teq),两个曲面有重叠但不存在交叉,黄色曲面在下绿色曲面在上,说明如果不比较tc和teq的大小直接通过teq计算D1会造成换道预警区域偏大,本文通过比较时间来取值能使换道安全预警距离更加贴合实际情况。
图7(b)中白色曲面为D2,受固定预警时间与相对速度影响,通过D1与D2的比较,可保证驾驶员有充足的反应距离。在相对速度较小时D1大于D2,取较大的D1可以保证在足够反应距离内换道。在相对速度较大时D1小于D2,若按照较小的D1预警,驾驶员可能没有足够的应对时间,所以为保证驾驶员有充足反应距离此时取较大值D2。综上所述,换道安全距离取D1和D2中较大的值。
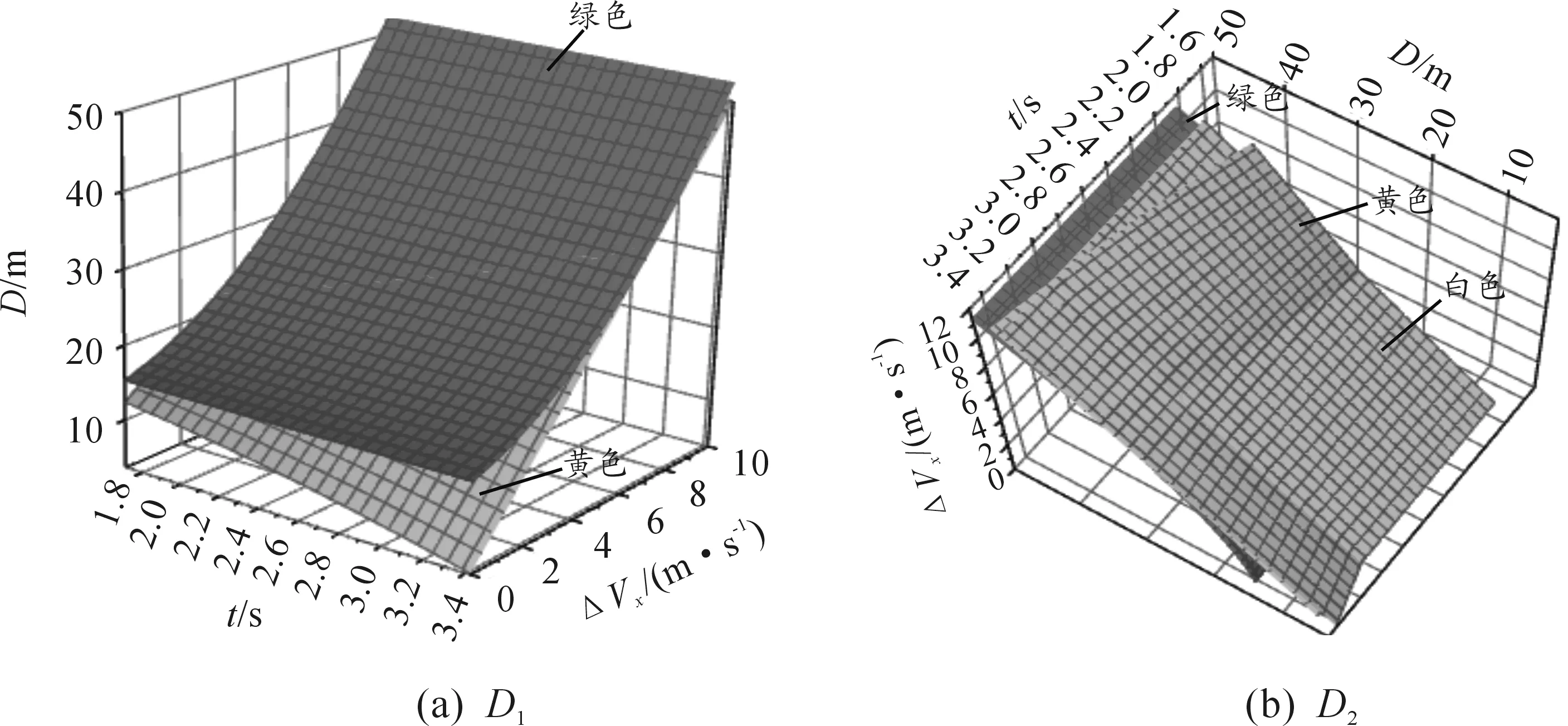
图7 换道安全预警距离模型
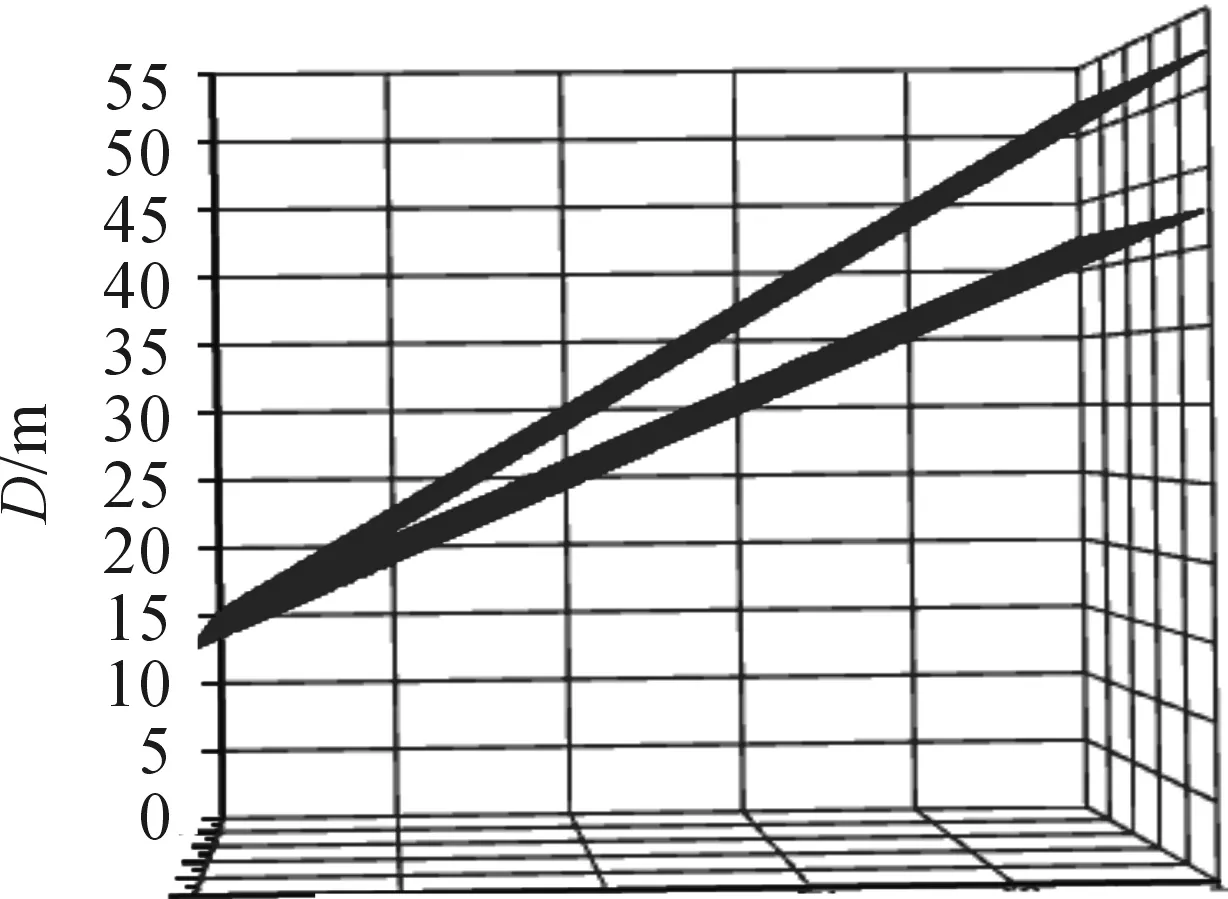
图8 文献[6]最小换道距离模型
对比文献[6]的最小换道距离模型可得:假设加速换道过程中碰撞点在横向移动完成时刻对应的位置,并在横向移动结束时刻换道车辆速度等于侧后方车辆纵向速度,则将换道预警的阈值设为3 s和5 s,如图8所示。进一步将本文提出的换道安全距离线与文献[6]提出的换道最小距离线投影到相对速度-换道安全距离平面上进行对比,结果如图9所示。
图9中:黄色线表示本文提出的换道预警安全距离,蓝色部分为文献[6]提出的最小换道安全距离,图9(a)(b)分别为ay=0.41(m ·s-2)和ay=1.64(m ·s-2)时的换道安全距离模型,可见与相对速度和固定预警时间相比,ay对换道安全距离的影响较小,两幅图中本文提出的换道安全预警距离都要小于文献[6]中提出的换道安全距离,可见换道横移时间在3~6 s内的加速换道安全预警距离都小于文献[6]中提出的最小换道距离。因此,本文提出的换道安全距离模型在保证安全的基础上有利于提高换道效率和道路通行能力,且由于考虑了横向碰撞时间,使换道安全预警距离模型更贴合实际情况。

图9 换道安全距离模型
最后,根据换道安全距离得到换道预警规则,如图10所示。对照ay-T模型,根据换道开始0.5 s时的ay确定T,再通过tc和Δvx计算teq,取较小值作为TTC1。对根据TTC1算出的D1与根据TTC2算出的D2进行比较,获得最终换道安全距离Dsafe。最后,根据文献[7]可知本车后方3 m内区域为最危险区域,故设置本车侧后方3 m内若出现障碍物则无条件立即报警并禁止转向。同时,设置当实时距离DAB(0)小于换道安全距离Dsafe时向驾驶员示警,否则视作安全不发出警示。
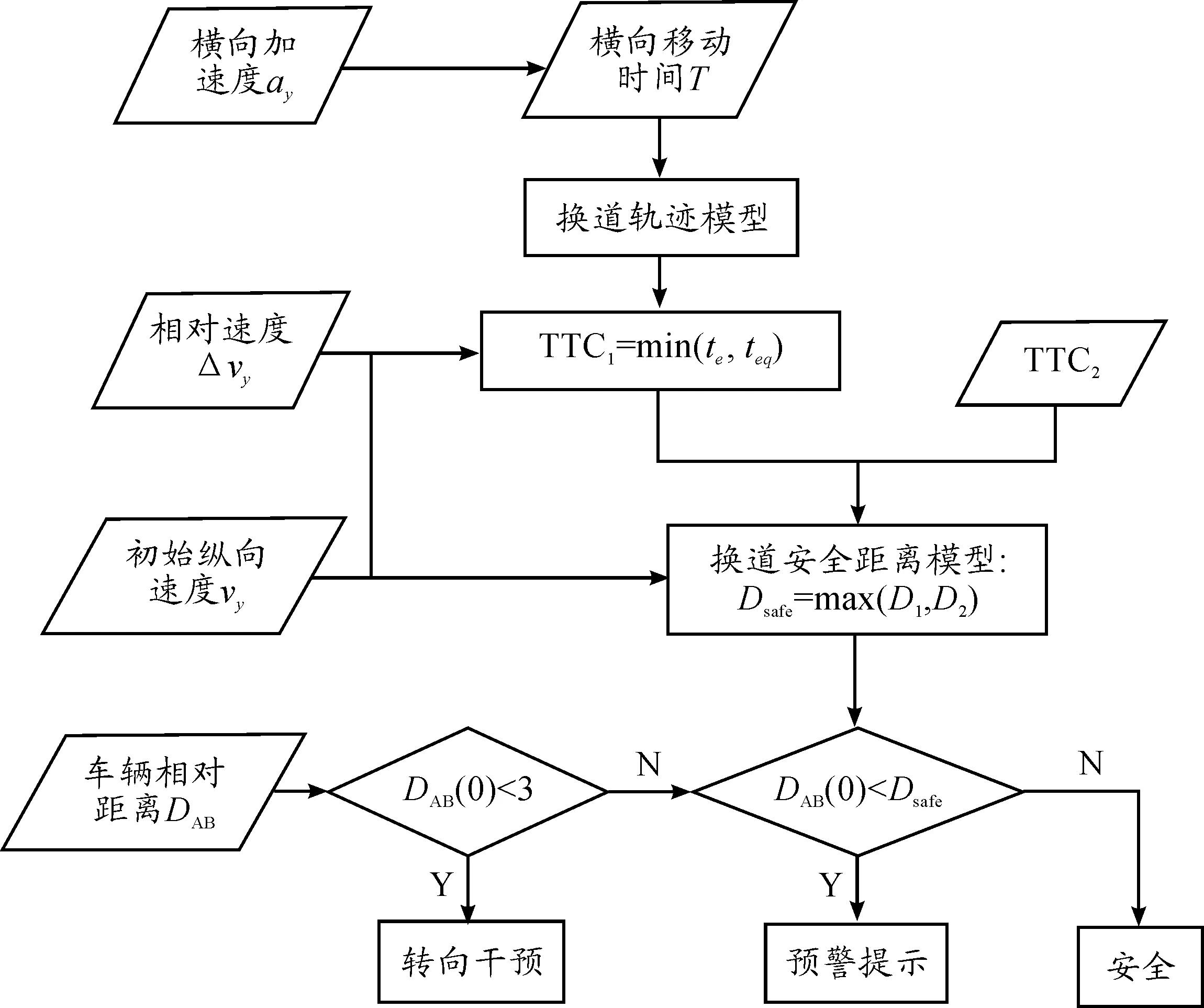
图10 换道预警规则
5 换道预警仿真分析
本文基于Simulink进行建模,给出3种具体换道工况进行仿真:车辆A分别以vx为11.67、14.45、17.23 m·s-1开始加速换道,换道开始0.5 s时的横向加速度分别为1.64、1.44、1.02 m·s-2,纵向加速度axA=2 m·s-2,,并设置侧后方车辆B以vxB=20 m·s-1匀速直线行驶,两车初始距离DAB(0)=30 m。
由以上行驶条件可分析出ay、tc、ΔVvx、teq、TTC1、TTC2与Dsafe这几者之间的对照关系和对应状态下的换道安全预警距离及预警状态,如表2所示。
表2 仿真情况对应的换道安全预警距离及预警状态

ay/(m·s-2)Δvx/(m·s-2)TTC1/STTC2/SD1/mD2/mDsafe/m预警状态1.648.331.713.037.3241.9941.99预警1.445.551.823.032.7933.6533.65预警1.022.771.403.027.1823.5127.18安全
如表2所示, 3种仿真工况按照换道预警规则,在横向加速度2 m·s-2以内换道,只有A车在相对速度为2.77 m·s-1时换道是安全,相对速度为5.55、8.33 m·s-1时需要预警。仿真后可得到车辆A以不同速度换道时,车辆B与A的间距变化曲线如图11所示。由图11可得车辆A按照既定轨迹,横向移动时间分别为3、3.2、3.8 s时的横向位移变化曲线,如图12所示。
由于以上仿真模型中后侧方车辆B以速度vxB=20 m·s-1匀速行驶,因此3种换道工况的安全跟车距离同为D=vxB(0)td+Df=20×1.2+2=26 m。对比分析图11、12和表2中数据可知:
1) 当两车相对速度为2.77 m·s-1、车辆A以横向加速度1.02 m·s-2换道时,1.38 s后到两车速度相等,此刻相对纵向距离最小,为26.56 m,大于跟车距离26 m,所以当前换道状态安全,与预警规则得出的结论一致。
2) 当两车相对速度为5.55 m·s-1、车辆A以横向加速度1.44 m·s-2换道时,换道车辆在1.60 s时到达碰撞临界位置,此时两车相距23.68 m,然后在2.77 s时达到最小相对纵向距离22.30 m,3.2 s后换道结束。由此可知:在tc时刻、两车速度相等时刻以及换道结束时刻两车间距都小于安全跟车距离,说明换道过程中易发生危险,当前换道状态不安全,与预警规则得出的结论一致。
3) 当两车相对速度为8.33 m·s-1、车辆A以横向加速度为1.64 m·s-2换道时,由图12可知换道全程两车相对距离一直在减小,并在到达换道碰撞临界点1.4 s和换道结束时刻3.8 s时相对距离都小于安全跟车距离,可见当前换道状态不安全,与预警规则得出的结论一致。所以,本文设计的换道安全预警距离模型和预警规则有实际意义和应用价值。
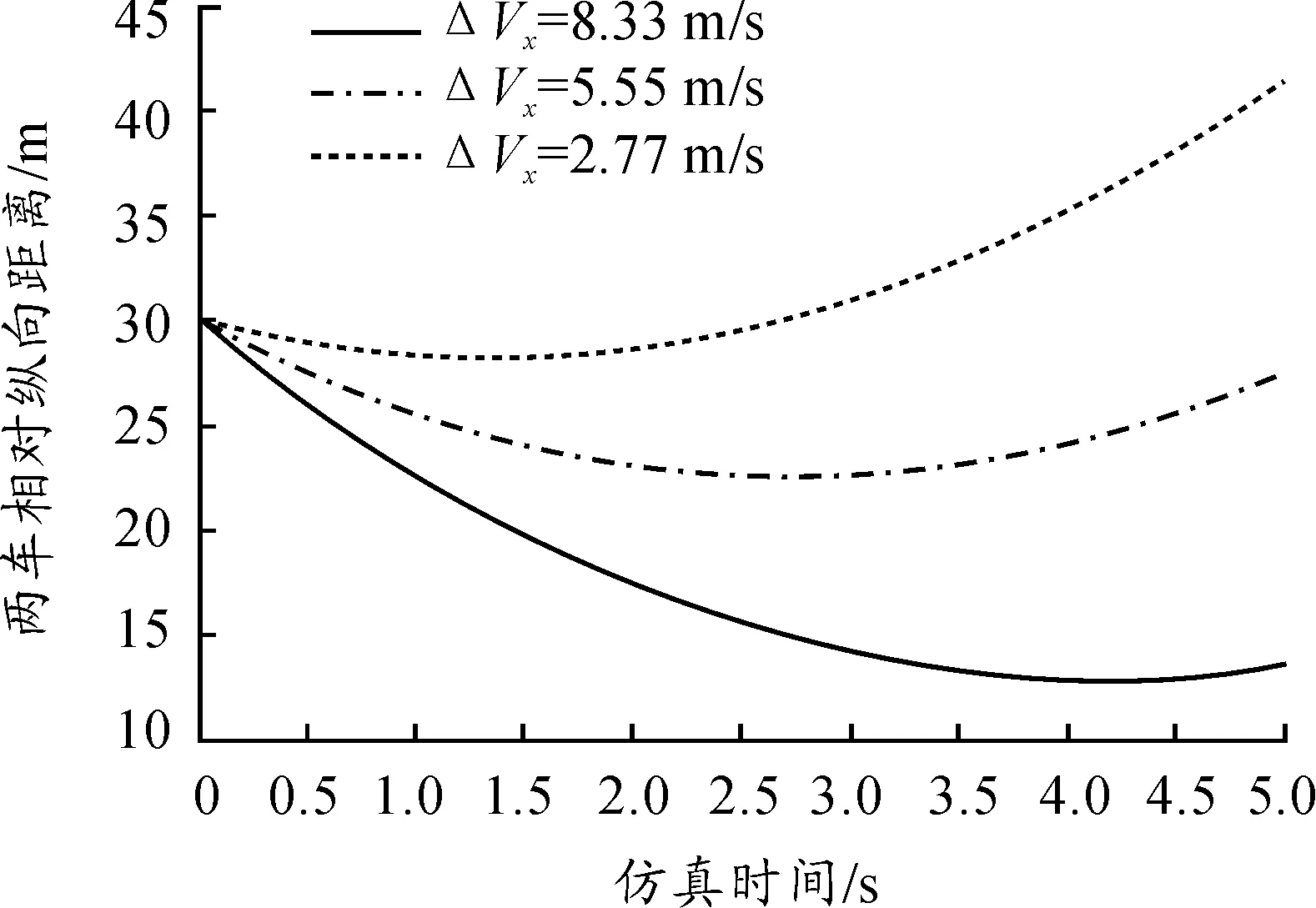
图11 两车纵向距离变化曲线
6 结束语
通过分析换道轨迹,并从发生危险碰撞分界点开始分析,建立换道安全距离模型和预警规则。对换道安全预警距离模型中的各个参数之间的关系进行分析,与文献[6]最小换道距离模型进行对比,结果表明:本文设计的换道安全预警距离较小,在保证换道安全的基础上有利于提高换道效率。最后,对换道预警规则进行仿真验证,结果表明:本文参照换道危险状况建立的预警规则有实际意义和应用价值。
[1] 王畅.车辆换道预警的若干关键问题研究[D].西安:长安大学,2012.
[2] 付静静,孙浩,杜春臣.基于驾驶人换道行为的换道决策辅助系统预警时间研究[J].北京汽车,2012 (4):42-46.
[3] 葛如海,储亚婷,谢永东,等.基于Prescan的换道预警规则研究[J].重庆交通大学学报(自然科学版),2016(1):172-176.
[4] 田娥,李立新.基于换道后距离预测的横向安全预警模型[J].现代制造工程,2017(1):55-57,50.
[5] 郭艳君,徐远新.嵌入式换道预警系统设计[J].科学技术与工程,2015(6):199-205.
[6] 杨双宾.高速公路车辆行驶安全辅助换道预警系统研究[D].长春:吉林大学,2009.
[7] VISVIKS C.Study on lane departure waring and lane change assistant systems[R].[S.l.]:Transport Research Laboratory,2008.