基于EDEM-Fluent仿真的自旋射流式挖藕机的设计与试验
2018-03-10夏俊芳张国忠王培通劳山峰张秀梅
吴 昊,夏俊芳,张国忠,王培通,劳山峰,张秀梅
0 引 言
莲藕是一种易种难收的重要水生蔬菜和特色农产品,其用途较广,具有丰富的营养和药用价值。中国莲藕种植约有3 000年历史,遍布华南、西南、长江流域等地。随着农业结构的调整,农民与农业企业种植莲藕的积极性不断高涨,莲藕的种植面积逐年增加[1]。但是每年莲藕挖出量较少,大部分莲藕自然烂掉,造成极大的经济损失。现代品种的莲藕生长在深30~40 cm的泥土中,在田间的分布没有明显的规律,呈随机分布[2]。目前藕农挖掘莲藕的主要方法是人工水枪式冲挖[3],即手持水枪冲刷覆于莲藕上方的泥土,再将莲藕从泥土中抽出,劳动强度较大,作业效率不高,机械化程度较低。
经查询相关资料和实地考察,近些年国内曾有少数单位和个人自发研究过莲藕采挖机,如武汉市农机化服务总站、武汉兴盛农机技术开发有限公司、重庆市北碚腾龙机械厂、山东微山湖、山东华盛农业药械有限责任公司、武汉市东西湖区的曹子炜父子、四川省遂宁市桂花镇大磨村肖志军等针对湖泊和藕田研制过挖藕机具,但均未能推广应用。
由于莲藕采挖难度大,采挖环境恶劣,影响因素较多,基本无人研究其采挖机理,目前仍无成熟的技术和装备。在国外,日本研究、生产的挖藕机,生产效率低,作业机动性和适应性差,不适应规模化的连片种植,且价位高达30万元人民币以上,很难被我国藕农接受,不适合中国的国情。未见到其他国家和地区关于莲藕机械化收获技术装备的深入研究报道[4-9]。
中国现有的水力挖藕机械主要分为两大类,一种为自走式水力挖藕机,其结构复杂、造价高、适应性差;另一种为浮筒式水力挖藕机,其操作过程繁琐,需要人力持续晃动机器,挖藕效率不及人工手持水枪冲挖,难以推广[10-20]。上述两类挖藕机分为单喷头和多喷头两种类型。单喷头挖藕机挖掘幅宽较小,需要设置喷头往复移动机构和动力机,结构复杂,造价高。多喷头挖藕机在一定程度上提高了挖掘幅宽,但容易造成莲藕折断损伤。
针对水田莲藕采挖对挖藕机械的需求,以有效提高挖藕效率及降低挖藕操作强度为目标,本文结合传统水枪挖藕方式,设计了一种自旋射流式挖藕机,并对挖藕机的关键部件喷头进行设计,通过离散元软件进行流固耦合仿真分析,详细分析了喷头角度和直径对挖掘深度和范围的影响,并进行了水槽模拟试验及田间性能试验。
1 挖藕机结构与工作原理
1.1 挖藕机结构
自旋射流式挖藕机主要由水泵HONDA WB30XH、机架、浮圈和旋转管路组成,如图 1所示。浮圈为可充气橡胶圈,通过控制充气量调节其产生的浮力,调节机器在水中的高度。机架内部设计有伸缩支架,可以调节旋转管路与浮圈的距离。机器底部设置有旋转管路,该管路三通连接处为密封可旋转结构,能绕机器中心轴线旋转。管路两端装有出水喷头,能随旋转管路作圆周运动。
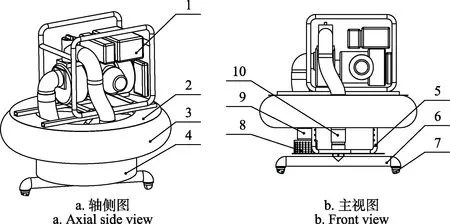
图1 自旋射流式挖藕机结构图Fig.1 Structure diagram of spin-jet flow type of lotus root digging machine
1.2 工作原理
自旋射流式挖藕机由4 kW的汽油机水泵驱动,水泵规定点流量为35 m3/h,扬程为17.3 m。机器底部的旋转管路两端装有出水喷头,喷头中心距离为1 000 mm,即喷头旋转圆周直径为1 000 mm。田间作业时,高压水流从喷头喷出,冲击泥土,旋转管路受到反作用力绕机器中心轴线旋转,当机器前进时,喷头的运动轨迹为螺旋运动,如图 2所示。该机工作过程中,从喷头喷射出高压射流,覆盖莲藕上方的泥土受到射流冲击破碎后被水流带走,直至莲藕完全裸露在水底,受自身浮力作用浮出水面,再由人工打捞,完成莲藕采挖作业。

图2 田间作业原理Fig.2 Field operation principle
2 喷头参数设计
2.1 旋转管路设计
旋转管路结构如图 3所示。为减少管路对水泵工况流量及扬程的影响,两根横管截面面积之和等于水泵出水管截面面积,可得横管内径与水泵出水管内径关系式。

式中Dh为横管内径,mm;Db为水泵出水管内径,mm。
测量水泵出水管内径Db为76 mm,由式(1)得两横管内径为53.732 mm。根据不锈钢管道标准件手册查到接近该尺寸的管道内径为54 mm。
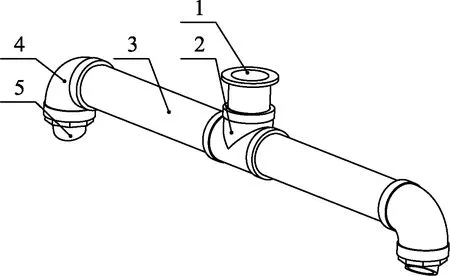
图3 旋转管路结构Fig.3 Structure diagram of rotating pipe
2.2 基于虚拟仿真的喷嘴参数确定
藕塘中高压射流冲刷泥土颗粒的过程为流固耦合作用,需要利用 EDEM-CFD耦合进行数值模拟。目前EDEM-CFD耦合模拟分析已大量应用于气固耦合及液固耦合的流场分析,成为研究颗粒运动及流场分布的有效方法。通过Pro/Engineer 5.0进行藕塘三维建模,进行固定位置的单喷头虚拟仿真试验,研究喷头角度及喷头直径对射流冲刷泥土挖掘深度的影响。
2.2.1 建立泥土模型
Hertz-Mindlin with JKR模型是一个凝聚力接触模型,考虑颗粒之间范德华力的影响和黏性接触模型。在这个模型中法向弹性接触力的实现基于Johnson-Kendall-Roberts理论[21-22]。由于藕塘泥土具有一定的黏性,且湿润的泥土颗粒间具有范德华力的影响,故使用JKR模型对泥土颗粒进行建模。
在华中农业大学人工种植藕田中测得泥土堆积角平均值为42°。体积密度为1 714 kg/m3,通过EDEM中JKR模型数据库GEMM查得JKR系数为60。恢复系数为0.15,静摩擦系数为1.16,动摩擦系数为0.2。根据相关文献查得土壤弹性模量为1 143.2 kPa,泊松比为0.4[23]。由弹性模量与泊松比的关系

式中v为泊松比;E为弹性模量,kPa;G为剪切模量,kPa。
则剪切模量为408.3 kPa。由于仿真试验目的是为了分析喷头喷射水流流速及喷射角度对挖掘深度的影响,在不改变其他边界条件的前提下,可以假设以上物性参数为近似值。为保证仿真试验可行性及可重复性,根据相关文献及藕田泥土环境,设泥土颗粒直径为3 mm[24]。在EDEM中建立泥土模型[25-27],长宽高分别为1 000、600、420 mm。
2.2.2 耦合边界条件
选用的水泵规定点流量为35 m3/h,旋转管路两端各有一个喷头,根据流量与管道直径的关系式可知[28],单个喷头喷射水流流速与口径的关系为

式中d喷头直径,mm;V为单个喷头喷射水流流速,m/s;Q为水泵额定流量,m3/h。
管路结构及动力源保持不变的条件下,仅考虑喷头直径及喷射角度对挖掘深度的作用效果,忽略喷头直径及喷射角度对水泵工况流量的影响。对比喷头不同形状结构对冲刷泥土的效果可以发现,圆形喷头的挖掘效果更好[29]。根据仿真预试验发现,当喷嘴射流速度取5 m/s时,挖掘效果不好,故设定喷嘴射流速度为10、15、20 m/s共3个水平。根据水泵最大工作流量为35 m3/h,由式(3)得出对应喷头直径为25、20、17 mm。
图4为喷头喷射平面示意图。如图4所示,喷头喷射方向与竖直方向夹角为θ,此喷射平面与喷头运动方向相切。为研究喷头喷射角度θ及喷头直径d对挖掘效果的影响规律,以喷射角度及射流速度两因素进行双因素仿真试验,分析射流冲刷土壤颗粒的挖掘深度。喷头角度及射流速度的双因素水平表如表1所示。
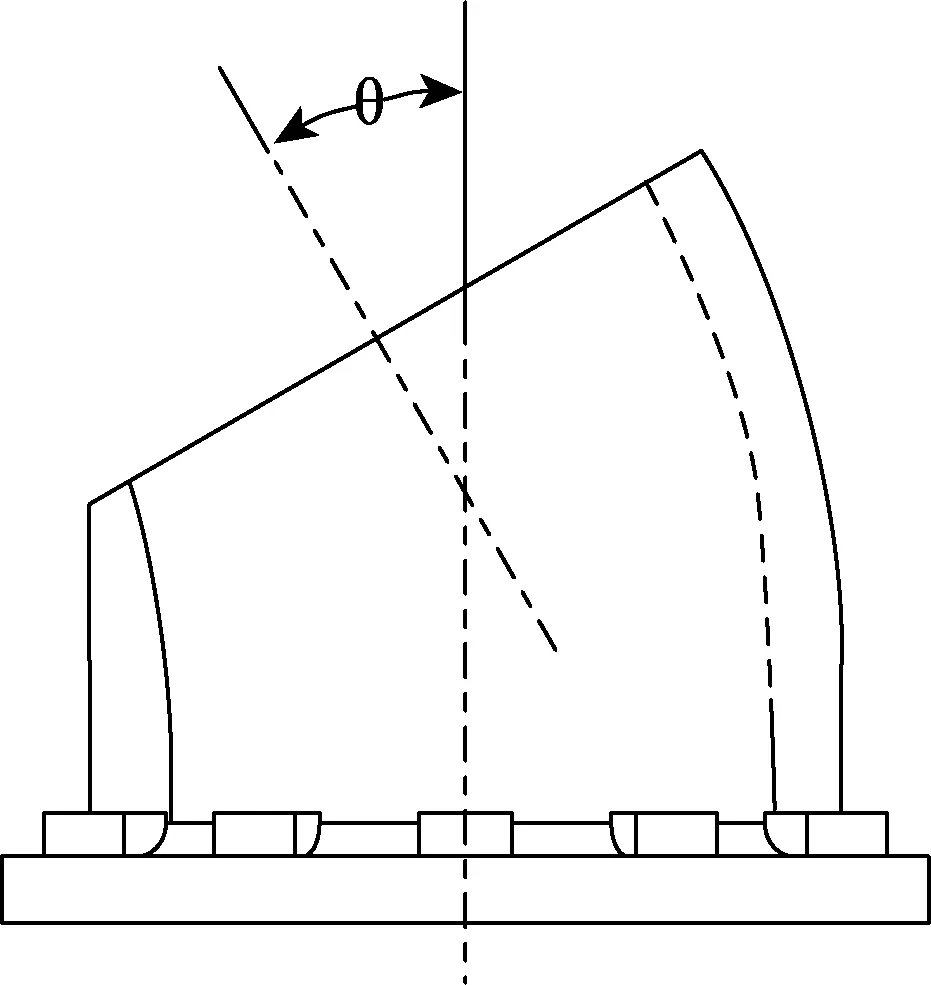
图4 喷头喷射平面示意图Fig.4 Diagram of nozzle jet plane
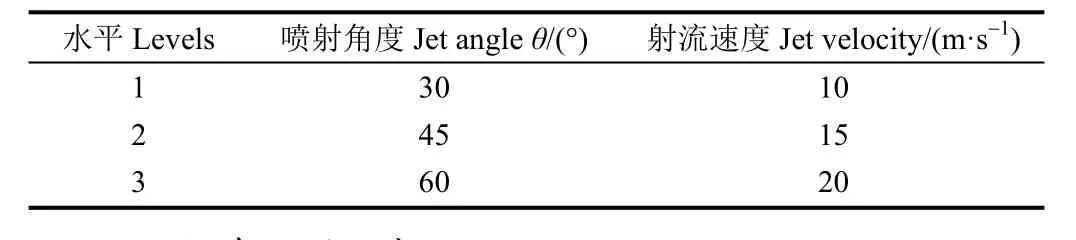
表1 双因素水平表Table 1 Double factors level table
2.2.3 仿真结果分析
通过EDEM-Fluent耦合仿真,得到挖掘1 s过程中最大挖掘深度如表 2所示,其中最大挖掘深度是未被冲开的泥土颗粒距离喷嘴的最大垂直距离。
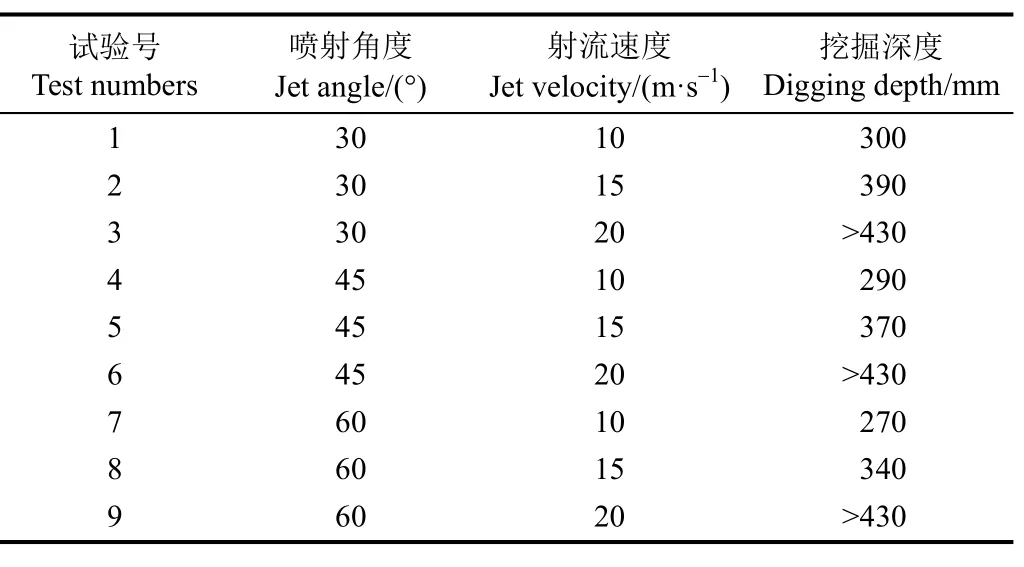
表2 试验数据表Table 2 Test results
由图 5可知,当喷射角度不变时,随着射流速度增加,挖掘深度增加。由于藕田莲藕生长于泥面下400 mm以内,为减少仿真时间,土槽模型泥土颗粒深度设置为420 mm,土槽模型底部距离喷嘴垂直距离为430 mm,射流速度为20 m/s时,3种水平的喷射角度仿真试验结果显示,均能挖掘到土槽最底部,即挖掘深度都超过430 mm。当射流速度不变时,随着喷射角度增大,挖掘深度降低。即挖掘深度与射流速度呈正相关,挖掘深度与喷射角度呈负相关。在不考虑其他因素的前提下,喷射角度越小,射流速度越大,即喷头直径越小,越有利于提高挖掘深度。
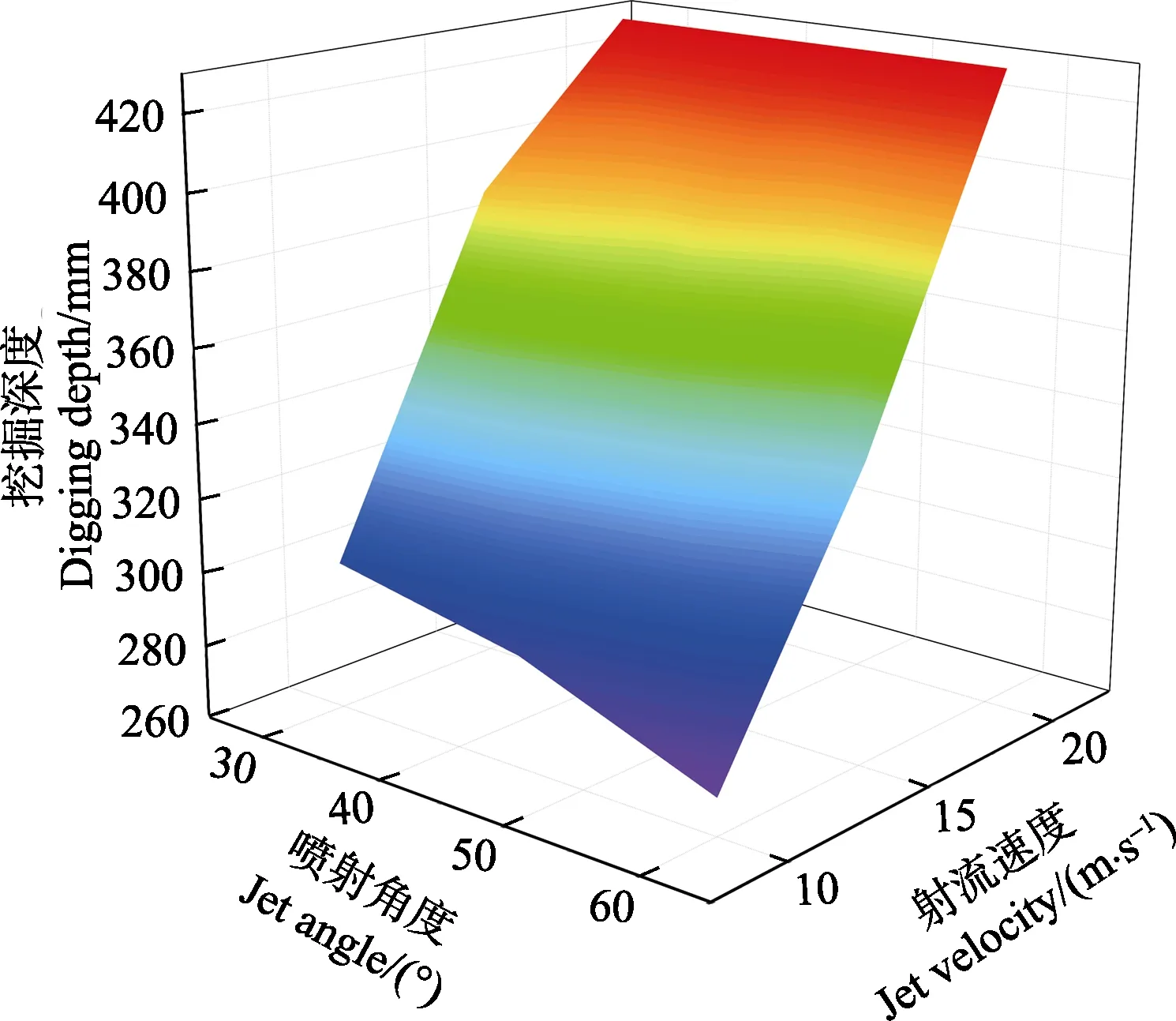
图5 喷射角度与射流速度对挖掘深度的影响Fig.5 Influence of jet angle and jet velocity on digging depth
图6 为9次仿真试验到达1 s时刻的截图。对比图6c、图6f和图6i可知,喷射角度为30°时,上层泥土颗粒出现回流情况,当喷头旋转离开此喷射位置时,会导致上层泥土回填覆盖,不利于莲藕浮出水面,而喷射角度为45°和 60°时,上层泥土颗粒被水流带走,没有出现回填的情况。即喷射角度越大,破碎的泥土越容易被水流带走,不易发生泥土回填现象。由于射流速度是影响莲藕收获质量的决定因素,流速过大会对莲藕表面及藕节产生损伤,当射流速度为20 m/s,喷射角度为45°时,能够达到430 mm的挖掘深度,满足莲藕采挖深度的要求,故选择喷头直径17 mm,喷射角度45°为最优组合参数,理论上可以有效地冲开覆盖于莲藕上方的泥土。
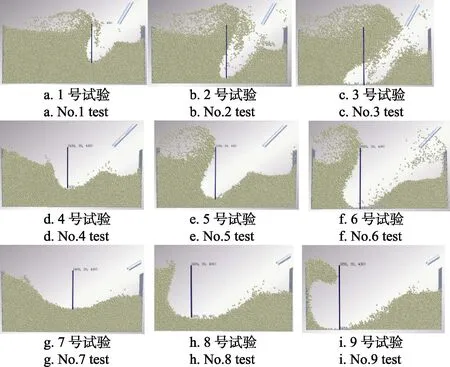
图6 EDEM-Fluent耦合仿真剖面图Fig.6 Clipping of EDEM-Fluent simulation
2.3 挖掘幅宽
理论作业幅宽如图 7所示,最大深度挖掘范围所形成的圆周直径就是该机作业幅宽,最大深度挖掘范围直径B与喷头旋转圆周直径A的关系为

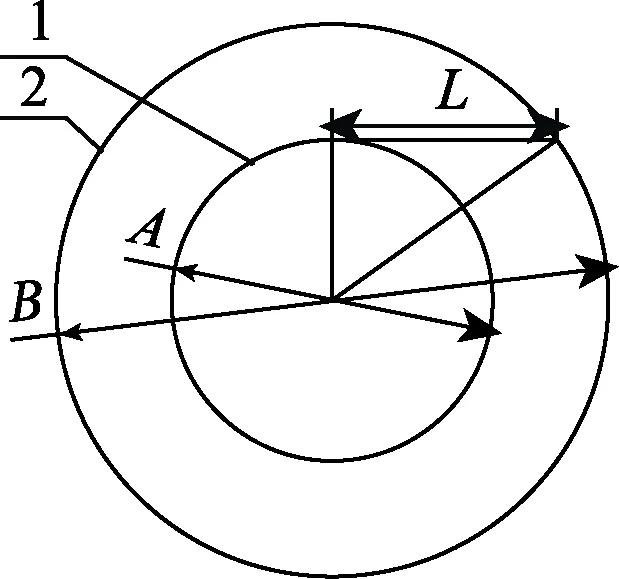
图7 理论作业幅宽示意图Fig.7 Diagram of theoretical operating width
图7中最大挖掘深度位置到喷头的水平距离即为L,从图中测量得到L值如表3所示。
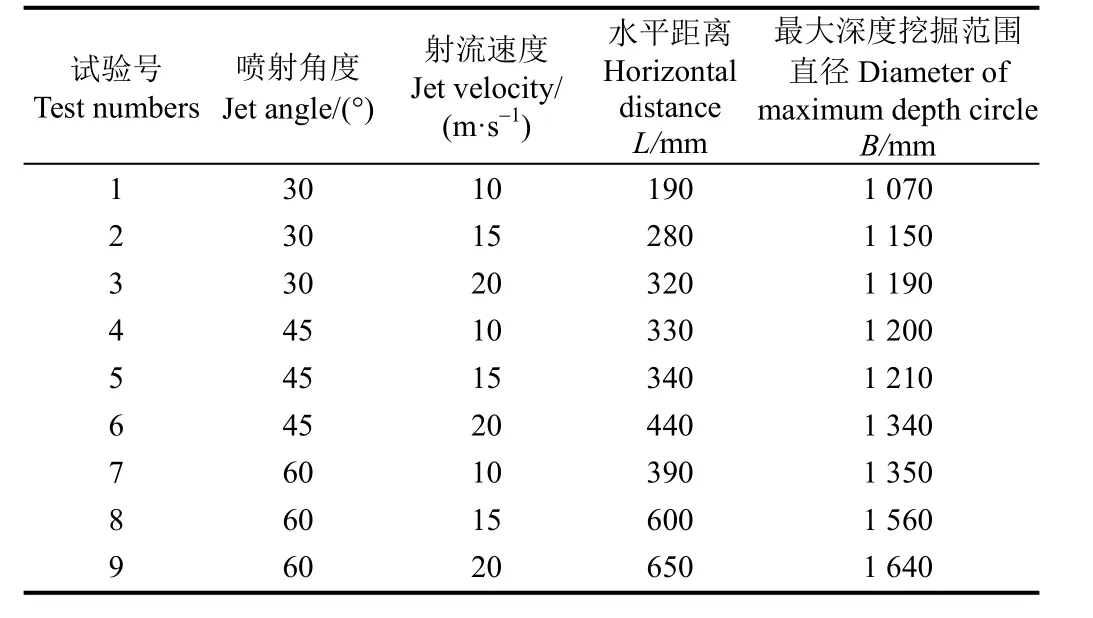
表3 挖掘深度及挖掘范围Table 3 Digging depth and digging range
表 3表明作业幅宽随着喷射角度和射流速度的增加而增加。当喷射角度为45°、射流速度为20 m/s时,作业幅宽达到1 340 mm。
3 挖掘性能试验
3.1 材料与方法
试验地点为华中农业大学室外水槽,将人工种植藕田中的泥土倒入水槽中。预埋莲藕试验品种为鄂莲一号,每次将10根莲藕埋入泥土下40 cm位置后,将泥土压实,静置一天。为评判莲藕损伤情况,选用无损伤主藕均为3节。拆卸挖藕机浮圈,将该机置于试验台架上,推动机器前进模拟田间挖藕过程,如图 8所示。推动前进速度约0.1 m/s。

图8 样机性能试验台Fig.8 Prototype performance test bench
3.2 试验设计
为验证理论分析的合理性,选择喷头直径和喷射角度2个因素,喷头直径分别取17 、20 、25 mm共3个水平,喷射角度分别取30°、45°、60° 3个水平,其他各参数保持恒定。将水泵调至最大功率档位,经过超声波流量计测得工作过程中,水泵出口流量维持在 32~36 m3/h范围内波动。试验目的在于考察所设计的挖藕机能否挖出埋于泥土下40 cm位置处的莲藕,以及挖掘深度和莲藕是否有损伤。试验均以挖掘深度、莲藕浮出率、破损率为试验指标,各因素水平的每种组合进行五次试验取指标平均值。
3.3 结果与分析
图 9为不同喷射角度与喷头直径对挖掘深度和浮出率的影响。由图9a可知,随喷射角度与喷头直径的减小,挖掘深度呈上升趋势,即挖掘深度与喷射角度呈负相关,挖掘深度与射流速度呈正相关,这与仿真试验结果一致。由图9b可知,当喷射角度为30°时,浮出率较高。根据仿真试验分析,不改变其他因素的条件下,当喷射角度为30°时挖掘深度最大,但会出现泥土颗粒回填的情况,而在台架试验中观察发现,当莲藕上方泥土被冲散后,莲藕迅速上浮,并未受到泥土颗粒回填的影响。
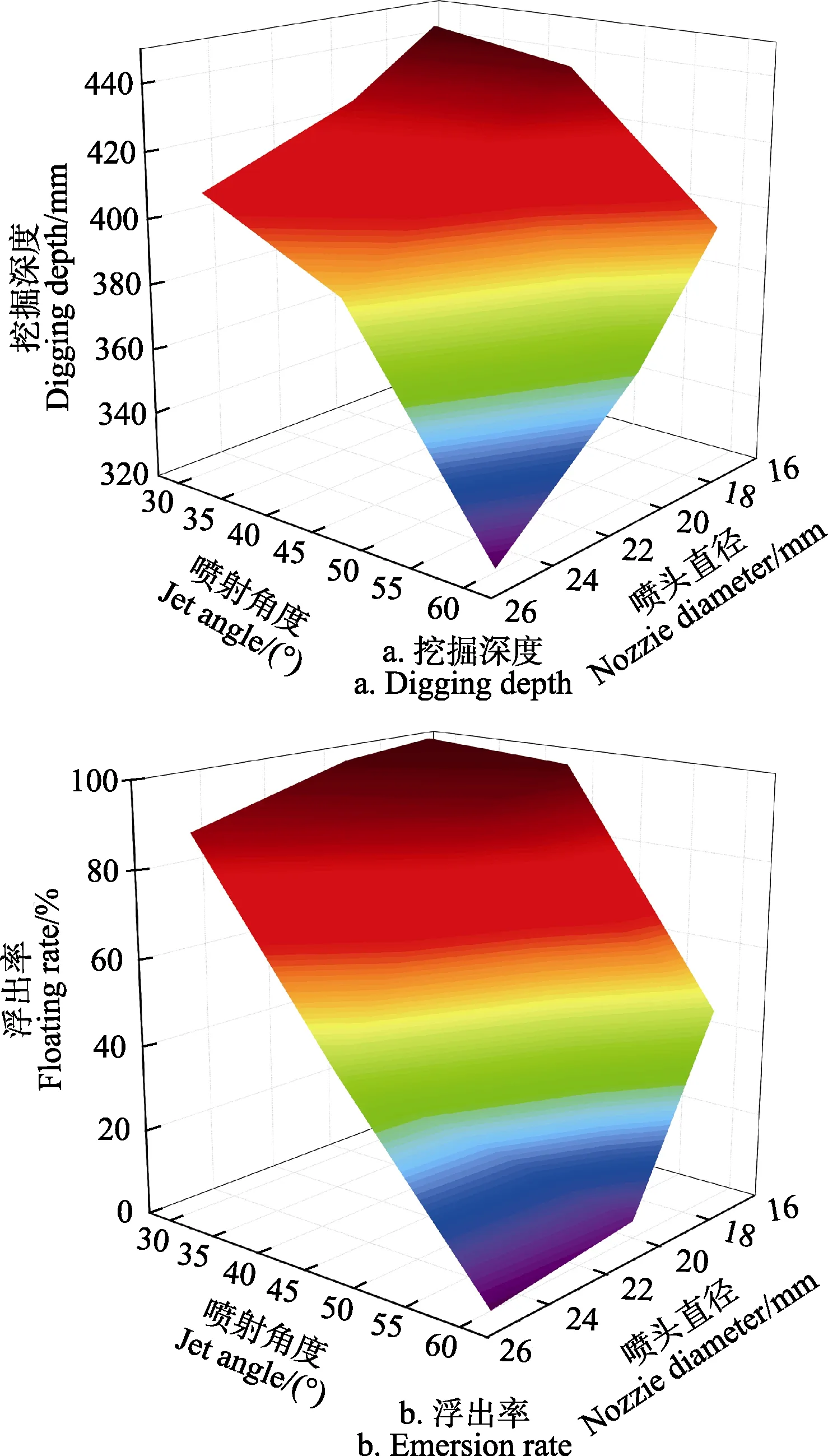
图9 台架试验结果Fig.9 Result of bench test
表4为台架试验结果。由表4可知,当喷射角度为30°,喷头直径为17 mm时,挖掘深度最大,浮出率达到100%。台架试验过程中,未见莲藕折断及表皮损伤的情况发生。将台架试验和仿真试验对应参数的挖掘深度进行对比,平均误差为9.5%。
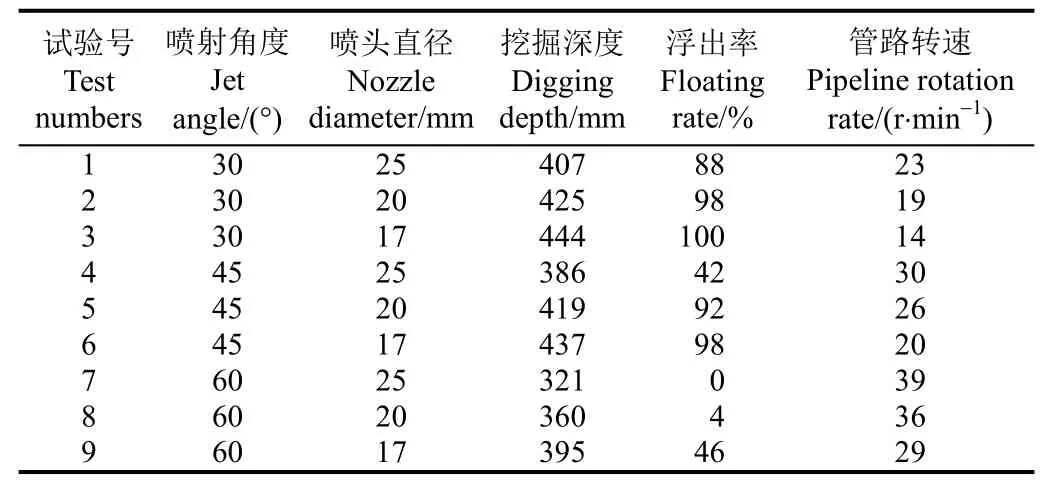
表4 台架试验结果Table 4 Results of bed test
4 田间试验
为进一步验证自旋射流式挖藕机工作性能,以水泵HONDA WB30XH为射流驱动力,规定点流量为35 m3/h,规定点扬程为17.3 m,自吸高度为5 m,于2017年10月16日在华中农业大学现代农业科技试验基地开展了田间挖藕试验,如图10所示。

图10 田间挖藕试验Fig.10 Field-digging lotus root test
田间作业时,发现前进速度约为0.1 m/s,喷射角度为30°,喷头直径为17 mm能够有效挖出埋于泥土中的莲藕,经测量平均挖掘深度可以达到420 mm,存在泥土回填情况,挖掘幅宽大于1.2 m。
5 结论与讨论
1)本文使用离散元法和有限元流体动力学进行了EDEM-Fluent耦合仿真,建立了泥土颗粒土槽模型,模拟喷射水流冲刷泥土的过程,分析了挖藕机射流冲刷泥土的作用机理,即挖掘深度随着喷射角度30°至60°范围内的增加而减小,随着射流速度10至20 m/s范围内的增加而增加。通过分析仿真射流过程发现,当喷射角度为30°时,会出现泥土回填的情况,对比台架试验,泥土回填并未影响莲藕的浮出率,可知莲藕上层泥土被冲散后,莲藕依靠自身浮力便可浮出水面,观察试验发现,莲藕浮出水面速度较快。
2)台架试验表明,喷射角度为30°,射流速度为20 m/s,即喷头直径为17 mm,选用水泵HONDA WB30XH,可以完全将泥下400 mm内的莲藕挖出。通过田间试验验证的该机的工作性能,挖掘深度可以达到420 mm,挖掘幅宽大于1.2 m。
仿真试验与台架试验的挖掘深度平均误差为9.5%,表明离散元与有限元流体动力学的耦合仿真应用在研究泥土-射流相互作用机理方面是可行的。由于莲藕水力采挖过程中射流对泥土的作用过程在水下不易观察,本文提出EDEM-Fluent耦合仿真运用于莲藕水力采挖设备对泥土作用机理的研究方法,为莲藕水力采挖设备的设计与优化提供理论依据。该方法还能应用于江河湖泊清淤、管道清理等其他水力作业的领域。
当喷射角度越大时,管路旋转速度越快,符合流体力学规律。当喷头直径越大时,管路旋转速度越快,表明大直径喷头喷射水流对管路反作用力更大。对比浮出率与管路转速可以看出,转速越小,浮出率越高。由于管路结构原因,不能进行转速调节试验,还需优化改进结构,进行深入研究。
[1] 夏俊芳,许绮川,黄海东,等. 加快莲藕采挖机械的研究[J]. 农业机械,2005(5):79.Xia Junfang, Xu Qichuan, Huang Haidong,et al.Research on accelerating the mechanical research of lotus root mining[J].Agricultural Machinery, 2005(5): 79. (in Chinese with English abstract)
[2] 刘义满,柯卫东,黄新芳. 莲藕人工采挖和机械采挖技术[J]. 长江蔬菜,2014(21):11-15.
[3] 郭洋民. 水田莲藕采挖机设计与研究[D]. 武汉:华中农业大学,2015.Guo Yangmin. Design and Research of Lotus Root Mining in Paddy Field[D]. Wuhan: Huazhong Agricultural University,2015. (in Chinese with English abstract)
[4] 黄伟. 一种挖藕机:201310264594.2[P]. 2013-06-21.
[5] 孔庆俊,高劲松. 莲藕挖掘机[J]. 农机具之友,2002(3):49.
[6] 朱守国. 水压莲藕掘取机液压系统技术难点的解决[J]. 起重运输机械,2002(12):35.
[7] 肖远金. 402_3型自走式水压莲藕掘起机[J]. 农业装备技术,2003(4):32-36.
[8] 郭义波,陈斯容. 国内首台挖藕机在汉诞生[J]. 湖北科技报,2000(11):45-49.
[9] 黄海东,张国忠,夏俊芳,等. 4CWO-3.2型船式挖藕机的研制[J]. 湖北农机化,2008(3):24-25.Huang Haidong, Zhang Guozhong, Xia Junfang, et al. Research and development of 4CWO-3.2 type ship dredging machine[J].Hubei Agricultural Mechanization, 2008(3): 24-25. (in Chinese with English abstract)
[10] 孙庆东. 挖藕机:200820025782.4[P]. 2009-04-22.
[11] 周明全. 高效智能多用船式挖藕机:200920227420.8[P].2010-10-06.
[12] 孟凡良,闵庆国,张郑伟. 船式液压挖藕机:201020-171210.4[P]. 2010-11-17.
[13] 曹子炜,曹强. 浮桶鸭嘴式挖藕机:20101012795.1[P].2011-09-02.
[14] 孟庆前. 一种新型挖藕机:201220694873.3[P]. 2012-12-07.
[15] 张耀宏,姜喆雄. 喷流式挖藕机的研制[J]. 粮油加工与食品机械,1982(8):16-17
[16] 王维. 4SWO-1.2型船式水力挖藕机的研制[D]. 南京:南京农业大学,2009.Wang Wei. The Development of 4SWO-1.2 Type Hydraulic Excavator[D]. Nanjing: Nanjing Agricultural University, 2009.(in Chinese with English abstract)
[17] 周良墉. 4OZ-3 型自走式水压莲藕掘取机[J]. 农业机械,2002(8):58.Zhou Liangyong. 4OZ-3 self-propelled hydraulic lotus root extractor[J]. Agricultural Machinery, 2002(8): 58. (in Chinese with English abstract)
[18] 贾立成. 船式自动挖藕机[J]. 农业机械,2000(9):61.Jia Licheng. Ship type automatic root digging machine [J].Agricultural Machinery, 2000(9): 61. (in Chinese with English abstract)
[19] 邵连珠,马加才. 4CW-2.6型船式挖藕机研制使用情况调查[J]. 山东农机化,2009(12):23.Shao Lianzhu, Ma Jiacai. Investigation on the development and use of the 4CW-2.6 ship type dredger[J]. Shandong Agricultural Mechanization, 2009(12): 23. (in Chinese with English abstract)
[20] 涂同明. 4CWO-3.2型船式挖藕机功能齐全[J]. 农机科技推广,2008(8):48.Tu Tongming. 4CWO-3.2 type of ship type excavator is fully functional[J]. Agricultural Machinery Technology Promotion,2008(8): 48. (in Chinese with English abstract)
[21] Johnson K L, Kendall K, Roberts A D. Surface energy and the contact of elastic solids[J]. Proc R Soc Lond, 1971(3):301-313.
[22] Gilabert F A, Roux J N, Castellanos A. Computer simulation of model cohesive powders[J]. Influence of Assembling Procedure,2007, 1(62): 184-194.
[23] 陆怀民,张云康,刘晋浩. 土壤切削弹粘塑性有限元分析[J]. 岩土工程学报,1995(3): 100-104.Lu Huaimin, Zhang Yunkang, Liu jinhao. Finite element analysis of soil cutting elastoplasticity[J]. Journal of Geotechnical Engineering,1995(3): 100-104. (in Chinese with English abstract)
[24] Ucgul M, John M F, Chris S. 3D DEM tillage simulation:validation of a hysteretic spring(plastic) contact model for a sweep tool operation in a cohesionless soil[J]. Soil & Tillage Research, 2014, 144(4): 220-227.
[25] 方会敏,姬长英,张庆怡,等. 基于离散元法的旋耕刀受力分析[J]. 农业工程学报,2016,32(21):54-59.Fang Huimin, Ji Changying, Zhang Qingyi, et al. Force analysis of rotary blade based on distinct element method[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(21): 54-59. (in Chinese with English abstract)
[26] 方会敏,姬长英,Chandio F A,等. 基于离散元法的旋耕过程土壤运动行为分析[J]. 农业机械学报,2016,47(3):22-28.Fang Huimin, Ji Changying, Chandio F A, et al. Analysis of soil dynamic behavior during rotary tillage based on distinct element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 22-28. (in Chinese with English abstract)
[27] 方会敏,姬长英,Tagar A A,等. 秸秆-土壤-旋耕刀系统中秸秆位移仿真分析[J]. 农业机械学报,2016,47(1):60-67.Fang Huimin, Ji Changying, Tagar A A, et al. Analysis of straw movement in straw-soil-rotary blade system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(1): 60-67. (in Chinese with English abstract)
[28] 李玉柱,阮明顺. 流体力学[M]. 北京:高等教育出版社,2008.
[29] 肖科星. 水田莲藕采收装置设计与试验[D]. 武汉:华中农业大学,2016.Xiao Kexing. The Design and Experiment of Harvest Device for Paddy-field Lotus Root[D]. Wuhan: Huazhong Agricultural University, 2016. (in Chinese with English abstract)