某车载速射迫击炮连发射击及炮口振动特性分析
2018-03-06秦俊奇狄长春孙也尊
方 宇,秦俊奇,狄长春,孙也尊
(1.陆军工程大学石家庄校区,石家庄 050003;2.驻247厂军事代表室,太原 030009)
0 引言
射击密集度是考核火炮性能的重要指标之一,而火炮发射过程中的炮口振动是影响射击密集度的重要因素。弹丸出膛瞬间,炮口的位置、速度等炮口参量发生很大变化,导致身管赋予弹丸的初始飞行参量变化,直接影响到最终的弹着点散布。
目前,对牵引火炮、车载火炮的炮口振动研究均已有一些文献。如文献[1-3]研究了炮口制退器质量等参数对炮口扰动的影响以及反后坐装置结构布置对炮口扰动的影响。
本文针对车载速射迫击炮连发时的炮口振动进行研究,该车载速射迫击炮采用炮闩浮动式自动机构,射击时并没有刚性支撑,其车身通过悬挂和轮胎与地面弹性连接。目前针对这种特殊情况研究的文献较少。通过对全炮模型的动态分析,同时运用ADAMS中的函数以及传感器功能,实现了炮闩浮动式自动机构连发时炮膛合力的准确施加,分析了车载速射迫击炮连发射击时的炮口振动特性,对相关车载武器设计研究有一定参考意义。
1 建立车载速射迫击炮模型
该车载速射迫击炮主要包含行驶系统和火力系统。其中,行驶系统为改装的东风猛士EQ2050A型底盘,前后悬架均为双横臂式独立悬架;火力系统为带自动机构的速射迫击炮系统,可以实现四连发发射。火力系统通过车箱与行驶系统相连接。车箱相对底盘可以水平转动,炮身相对车箱可以俯仰转动,以实现不同方向、俯仰角度的调炮与射击。
本文考虑该炮前向射击工况,为反映火炮的主要运动和受力情况,按照该车载迫击炮的结构特点,将其简化为由车辆悬架下质量、车身、摇架、炮管、后坐部分等5部分组成的多体系统,如图1所示。
建立虚拟样机模型时把摇架等对仿真结果影响小的质量等效到车体。根据实际的车辆武器系统模型以及地面参数化设计,确定双横臂式独立悬架的结构参数以及轮胎规格。本文建模中将车辆视为刚性体进行分析,车辆悬架减震系统按照弹簧阻尼系统进行标准化设计,从而得到车载速射迫击炮虚拟样机模型,模型共有30个运动构件,22个旋转副,9个固定副,9个平移副,虚拟样机模型如图2所示。竖直方向为Y方向,前后方向为Z方向,左右方向为 X 方向[4]。
2 连发射击时炮膛合力的施加
该车载速射迫击炮采用炮闩浮动式自动机构,由弹夹供弹,可以实现四连发发射。其工作原理为:迫击炮的身管与炮箱刚性连接,炮闩做后坐和复进运动时带动供弹机构、自动发射卡锁和自动击发机工作。在炮闩复进过程中,到指定击发位置时,击针撞击底火击发弹丸。击发后,作用于炮闩前端面的火药气体压力首先抵消炮闩复进的动能,当火药气体的推力大于炮闩后坐阻力时,炮闩开始后坐,并压缩复进簧储存能量,准备下一发的复进与击发。
因此,要施加相应的连发射击炮膛合力,需要判断炮闩运动的位置,当判断炮闩向前复进情况下,到达击发位置时触发炮膛合力曲线,作用在炮闩上,方向沿炮闩轴线向后,进行一次击发。
首先由相关内弹道参数,导入膛底压力随时间变化的曲线,如图3所示。在ADAMS中命名该样条曲线为SPLINE_1。
在身管、炮闩上建立MARKER_1、MARKER_2两个点,使两个点分别位于身管炮口圆心和炮闩前端面中心上。建立测量MEA_PT2PT_201_2,测量炮闩的前端面中心点与炮口圆心的距离,即用来判断炮闩的位置。当炮闩距离炮口中心3 020 mm时击发,即在炮闩向前复进过程中,每当其运动到该测量值MEA_PT2PT_201_2=3 020 mm时,触发一次炮膛合力。然后利用传感器(SENSOR)和IF函数即可监测迫击炮击发的时刻。
建立传感器SENSOR_1如图4所示。具体设置在图 4(a)~(d)的对话框中分别写入SENSOR 触发的表达式、SENSOR返回的值以及SENSOR的触发值如下所示:
(a)IF(.JEEP.PaoShuan_MEA_2:99,99,.JEEP.MEA_PT2PT_201_2-3020)
(b)time
(c)0.0
(d)26
表达式(a)中,IF函数是一个判断函数,其格式为IF(表达式1:表达式2,表达式3,表达式4),如果表达式1小于0,返回表达式2的值;如果表达式1等于0,返回表达式3的值;如果表达式1大于0,返回表达式4的值。JEEP.PaoShuan_MEA_2为炮闩的速度测量值,向前为正,向后为负。所以在该测量值小于零时,表达式返回99,不在0±26mm的范围内,则不会触发传感器。这样就保证了只有当炮闩向前运动到击发位置时才会击发。
表达式(b)表示传感器的返回值,表达式(c)为传感器的监测值,表达式(d)为监测值的允许误差。
最后需要施加炮膛合力,在炮闩上施加一个力FORCE_Ppt,方向指向身管正后方。此时需要用到SENVAL函数和AKISPL函数即可实现炮闩浮动式武器炮膛合力的施加。
SENVAL(SENSOR_1):返回 SENSOR_1 的值。
AKISPL(x1,x2,spline name,derivative order):x1为第1个自变量;x2为第2个自变量,设为0;spline name是所使用样条曲线;derivative order表示微分的阶次,取0时返回样条曲线的坐标值。
FORCE_Ppt定义为:
IF (SENVAL (SENSOR_1):0,0,1)*6E3*IF(TIME-SENVAL (SENSOR_1)-0.02:-AKISPL(TIME-SENVAL (SENSOR_1),0,SPLINE_1,0),0,0)*IF(TIME-4.3:1,1,0)
式中,IF(SENVAL(SENSOR_1):0,0,1)为附加因子,该函数用来避免在仿真开始时就施加炮膛合力[5-7]。由于仿真开始时,传感器的值从无到有,虽然为0,也会触发炮膛合力。加了该函数以后,传感器值为0时,炮膛合力也为0。
IF(TIME-4.3:1,1,0)为四连发调整因子,在时间大于4.3 s时不再施加炮膛合力,这样可以控制连发射击在第四发结束后停止。
3 炮闩平衡力的施加
由于炮闩浮动式自动机是依靠炮闩复进到达击发位置时击发,在击发时,炮闩仍有一定的向前运动的速度,该速度的改变会影响到炮膛内平均压力曲线,进而影响到弹丸初速。在不同的俯仰角射击时,由于炮闩本身的重力分量压缩复进簧,导致不同的射击俯仰角下,炮闩复进到击发位置时的速度并不一致,甚至可能复进不到击发位置。这就需要有一个力来平衡俯仰角不同时,炮闩本身重力沿身管轴线的分量。在真实的装备中,该力由平衡机构施加。
首先需要在身管上建立一个俯仰角的测量MEA_ANGLE_203,在炮闩上施加一个力PingHengLi,其大小为:
110*9.8*sin(MEA_ANGLE_203)
式中,110为炮闩的质量,该式即施加了一个大小相等方向相反的力来抵消炮闩本身重力沿身管轴线的分量。
4 仿真结果与分析
基于虚拟样机模型,代入上述炮膛合力,导入相应轮胎和路面参数文件、车体质量等物理参数和结构参数,进行了四连发射击时的炮口动态仿真。由于该模型是左右对称的结构,并且仅研究前向射击情况,故取炮口参量中的水平方向前后位移、竖直方向上下位移为因变量。模型中的悬架系统参数见表1所示。
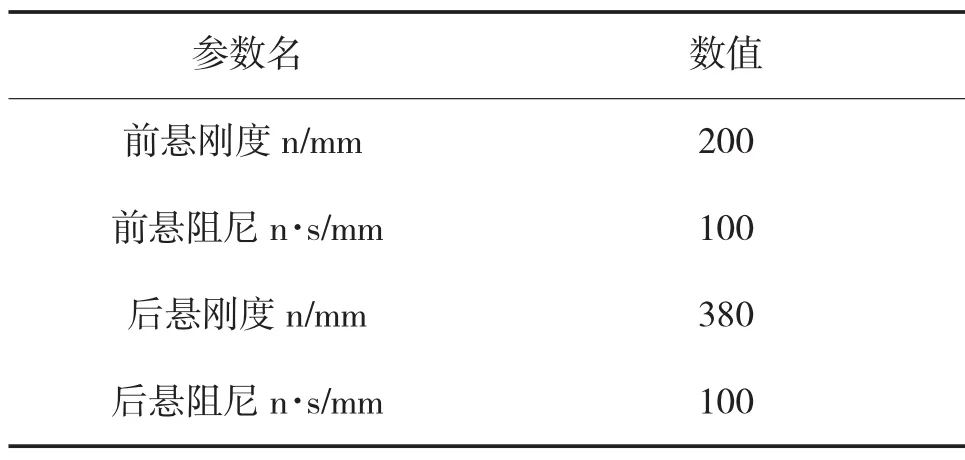
表1 悬挂系统参数
下页图5为四连发射击时炮口动态仿真结果。高低射角为15°,射向为正前方。
图5中各曲线含义如下:
(a)为四连发射击的炮膛合力。
(b)为炮闩与炮口圆心的距离。
(c)为炮口竖直方向Y、前后方向Z的坐标。
图5中的曲线可以分为击发前和击发后两个部分。由于仿真开始时模型并不是处于平衡位置,t=0 s到t=3 s期间为激发前,车体及炮身作小幅度的振动并渐渐趋于稳定,炮闩被预压力推动后坐并压缩复进簧。从3 s开始,炮闩被解脱,靠复进簧推力向前运动。3.182 s到3.206 s期间触发了第一次击发的炮膛合力,使得弹丸飞出身管,同时使炮闩后坐。炮闩后坐结束后开始反向加速复进,当再次运动到击发位置时,第二次触发炮膛合力,出现第二次击发,由此循环实现连发动作。
从第一发击发时刻开始,炮口中心点参数开始发生较大变化,炮口产生了前后方向、上下方向的振动以及俯仰的转动。其中,竖直方向Y上的位移幅值Ymax为164.38 mm,水平方向Z的位移幅值Zmax为61.09 mm。在连发发射后,炮口中心点位置趋于稳定,回到初始时的发射位置。
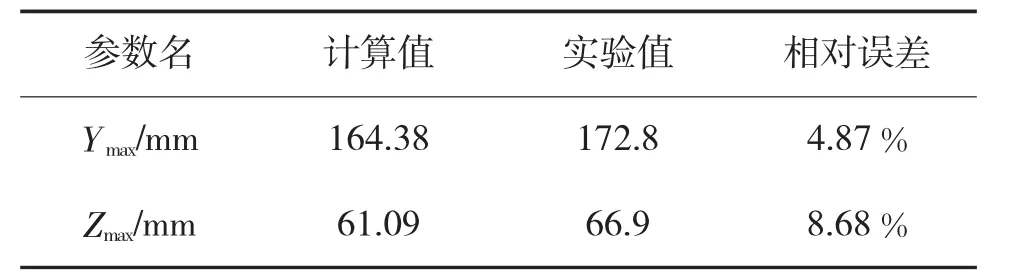
表2 计算结果与实验数据比较
表2为炮口振动实验数据与仿真数据的比较。其中,实验数据是通过高速摄影设备采集,经过图像处理后得到的。可看出仿真数据与实验数据基本吻合,表明该炮膛合力的施加方法使得炮闩浮动前冲击发过程比较符合实际情况,通过建模仿真手段研究车载速射迫击炮的炮口动态特性是可行的。
5 结论
1)对车载速射炮进行了动力学分析,并利用ADAMS软件中的函数以及传感器功能,实现了炮闩浮动式自动机构连发时炮膛合力的准确施加,该方法简单、高效、准确,具有通用性,对于今后连发武器的建模研究具有参考意义。
2)该型车载速射迫击炮,采用弹性悬架与地面连接,并无额外支撑。四连发射击时炮口上下振动幅度较大,达到164.38 mm。
3)今后的研究可以从该车载速射迫击炮的连发射击时炮口振动的影响着手,进一步探讨对射击密集度的具体影响,以及减小车载武器炮口振动的方法和技术途径。
[1]蔡文勇,陈运生,杨国来.车载火炮炮口扰动影响因素分析[J].南京理工大学学报,2005,29(6):658-661.
[2]徐志远,葛建立,杨国来.影响炮口扰动的火炮总体结构参数灵敏度分析与优化[J].兵器装备工程学报,2016,37(6):45-48.
[3]梁传建,杨国来,葛建立,等.反后坐装置结构布置对炮口振 动 影 响 的 研 究 [J]. 兵 工 学 报 ,2013,34(10):1210-1214.
[4]陈彦辉,郭旻,何宗颖,等.炮口振动测试方法及实践[J].火炮发射与控制学报,2010,31(1):80-83.
[5]程驰青,李强.基于ADAMS的炮膛合力施加方法[J].火炮发射与控制学报,2016,37(1):32-35.
[6]化斌斌,王瑞林,王宇建,等.转管机枪枪膛合力在虚拟样机中的施加方法研究[J]火炮发射与控制学报,2015,36(4):9-12.
[7]李涛,王瑞林,张军挪,等.某型转管机枪刚柔耦合多体发射 动 力 学 仿 真 [J]. 系 统 仿 真 学 报 ,2013,25(6):1382-1387.
[8]彭克侠,刘树华,曹广群,等.某火炮身管温度场分析[J].火力与指挥控制,2015,40(11):80-83.