基于舷角变化信息的来袭鱼雷弹道类型判别方法*
2018-03-06杨日杰陈佳琪陈贻焕
郑 强,杨日杰,陈佳琪,陈贻焕
(海军航空大学,山东 烟台 264001)
0 引言
潜艇水下鱼雷攻击是水面舰艇在未来海战中面临的主要威胁,如何对来袭鱼雷进行有效对抗是急需解决的重要问题。来袭鱼雷导引方式不同,弹道类型不同,则需要的对抗器材类型,对抗方法也会有所差异。鱼雷作为水下快速小目标,隐蔽性强,水面舰艇可用主动或被动声纳对鱼雷进行预警,为了有充裕的时间完成对鱼雷的预警、探测、跟踪、识别和对抗决策,舰艇需要在中远距离对来袭鱼雷报警,而主动声纳对来袭鱼雷报警距离近,难以满足对抗鱼雷的及时性要求。通常情况下,中远距离上的鱼雷探测主要依靠被动声纳,而被动声纳只能获得来袭鱼雷的方位信息,无法获取鱼雷的距离信息和类型信息,给对抗器材的使用和舰艇规避决策带来困难。一直以来,对来袭鱼雷的识别仅仅依靠像素层范畴(LOFAR 和DEMON 谱分析技术)[1],且只能实现鱼雷与非鱼雷目标的区别,而对相关战术信息缺乏有效应用,对来袭鱼雷弹道类型的判别缺乏深入研究。因此,在鱼雷向舰艇目标接近过程中,如果能够根据来袭鱼雷的舷角变化信息,判断来袭鱼雷可能的攻击弹道类型,则可为中远距离对抗器材的使用及鱼雷类型判别提供信息支持,提高舰艇反鱼雷水声对抗作战决策的针对性和有效性。
1 潜射鱼雷弹道模型
潜射鱼雷按自导方式主要可分为直航、声自导、线导+声自导、线导+尾流自导4种形式[2],目前直航鱼雷已较少运用,而线导+声自导、线导+尾流自导鱼雷在向目标接近过程中则采取线导导引,因此,鱼雷中远距离向舰艇接近过程中,本文主要研究两种不同类型的鱼雷弹道,即声自导鱼雷弹道和线导鱼雷弹道。
1.1 声自导鱼雷弹道模型
潜艇采用提前角法进行声自导鱼雷攻击如图1所示,图中T为鱼雷位置,A为被攻击舰艇位置,ct,vt为鱼雷航向、航速,cs,vs为舰艇航向、航速,qt为鱼雷所处舰艇的舷角,φ为理想攻击提前角,Q为鱼雷理想命中点,B为鱼雷的有利导引点。鱼雷按航向ct直航搜索接近目标,与舰艇目标在Q点相遇。采用提前角引导鱼雷攻击时潜艇须解算目标运动要素,通常鱼雷攻击的正常提前角可表示为[3]:
在一定射击条件下,鱼雷发现概率最高的提前角为有利提前角,即使鱼雷自导扇面中的某点与目标相遇,即将图1中鱼雷自导扇面内的B点与目标相遇。有利提前角φa可由K系数分段法和形心法近似求解,通常可由式(2)近似估计鱼雷攻击的有利提前角 φa[3]:
式中,K为优化系数,由鱼雷自导性能确定,qt为舰艇相对鱼雷舷角。
1.2 线导雷弹道模型
线导鱼雷导引方法主要包括现在方位法导引、修正方位导引、前置点导引、人工导引等。尽管线导鱼雷存在多种不同的导引方法,但以“三点一线”为特点的现在方位导引是潜艇控制鱼雷攻击目标的必经过程,特别是在有干扰条件下,现在方位导引法是对机动目标唯一有效的导引方法[4]。现在方位导引仅需要目标方位,潜艇、鱼雷位置及其航行参数信息,就可对线导鱼雷进行控制和导引。
本文主要研究线导鱼雷的现状方位法导引弹道,潜艇按周期测定目标舰艇所在方位,根据鱼雷位置和速度信息,控制鱼雷航向,使其方位与舰艇所在方位相一致[5]。如图 2所示,Sb0、S0分别为鱼雷发射t0时刻潜艇和舰艇所在位置,csb、cs分别为潜艇和舰艇的航向,舰艇相对潜艇初始目标方位为B0。Sb1、S1为t1时刻潜艇和舰艇所在位置,此时舰艇相对潜艇方位为B1。鱼雷出管后自主航行,然后按照设定的转角ω转至L1点,转入线导阶段。Sb2和S2,Sb3和S3…分别为导引时刻t2、t3…潜艇和舰艇所在位置,舰艇相对潜艇所在方位分别为B2、B3…。若在导引时刻ti潜艇位置点为,舰艇在潜艇方位为Bi,舰艇目标方位线方程可表示为[5]:
式中,k为方位线直线方程斜率。
为了提高鱼雷转入声自导状态后对目标的搜索、捕获能力,线导鱼雷通常按有利点进行导引,有利点位于鱼雷纵轴线前方r0点,根据鱼雷的当前位置,鱼雷航速vt及鱼雷有利点引导位置,可以得到鱼雷有利提前点满足的位置方程为:
式中,Δ t为线导鱼雷导引时间间隔。
由式(3)、式(4)得有利提前点与目标方位线Bi的交点,若存在两个交点,通常取距离发射艇较远的交点作为当前时刻鱼雷导引的目标位置点。
如果为线导+尾流自导鱼雷,线导阶段潜艇需要将鱼雷导引至滞后于当前舰艇目标所在方位的某点,以使鱼雷能够有效捕获舰艇尾流,线导弹道模型与线导+声自导鱼雷类似。
因此,通过现在方位导引法,潜艇在只有目标方位信息的条件下,根据潜艇、鱼雷位置及其航行信息,可以将鱼雷导向被攻击的舰艇目标。
2 基于舷角变化信息的弹道判别方法
2.1 判别依据
舰艇对中远距离来袭鱼雷报警时通常只能获取方位信息,处于声自导弹道中的鱼雷和处于线导导引阶段的鱼雷相对舰艇的舷角变化规律是不同的,可以根据鱼雷报警舷角的变化情况判断鱼雷可能的弹道信息。
如图1所示,Q和Q'分别为声自导鱼雷正常提前角攻击和有利提前角攻击时的鱼雷命中点,ΔATQ为相遇三角形,φ=∠ATQ和φa=∠ATQ'分别为相应的提前角,由于有利提前角导引是将鱼雷自导扇面中的某点(图中B点)与舰艇目标相遇,因此,φa<φ。假设经过Δ t时间后,舰艇到达N点,有利提前角导引鱼雷至T'1,正常提前角导引鱼雷至T1点,TT1=TT'1。鱼雷按正常提前角向舰艇接近过程中,相对舰艇舷角qt保持不变,而有利提前角攻击时鱼雷相对舰艇舷角缓慢变大,经Δ t时间后,舷角为∠QNT1=q't>qt。舷角变化范围的大小与对抗态势有关,当舰艇直航机动时,来袭声自导鱼雷相对舰艇舷角变化不明显。
当潜艇对鱼雷采用现在方位法导引时,为了保持平台对鱼雷的导引,潜艇通常选择较低的航速,鱼雷的攻击弹道主要取决于舰艇目标的机动,假设舰艇在水声对抗决策之前保持直航,且水面舰艇的航速明显高于潜艇航速。由图2可知,水面舰艇从S1到S4的运动过程中,鱼雷从L1到L4,鱼雷相对舰艇所在舷角明显增大,而舷角变化范围与对抗态势及舰艇和潜艇的运动状态有关。可见,当鱼雷在向被攻击舰艇接近过程中,鱼雷相对舰艇所在舷角会变大,相对于鱼雷有利提前角攻击弹道,现在方位法攻击弹道的舷角变化更为明显,因此,根据舰艇对来袭鱼雷报警后,鱼雷报警舷角的变化情况可以对来袭鱼雷的攻击弹道类型进行初步判断,为水声对抗决策提供依据。
根据不同鱼雷导引方式的特点,可设定鱼雷报警舷角的变化范围ΔqT,在特定时间间隔范围内,当鱼雷舷角变化量大于ΔqT时,可判断为现在方位法攻击弹道,否则为提前角或有利提前角攻击弹道。舷角变化量ΔqT的范围,需要根据具体的作战对象和对抗态势进行分析,本文将在特定战、技术背景下的判断方法进行仿真分析。
2.2 仿真分析
2.2.1 仿真参数
仿真参数如表1所示。对抗仿真时的来袭鱼雷的报警距离分为远距离(30 cab~40 cab)、中等距离(20 cab~30 cab)两种情况,在不同的报警舷角下,进行1 000次的蒙特卡洛仿真,统计判断时间分别为30 s和 60 s。
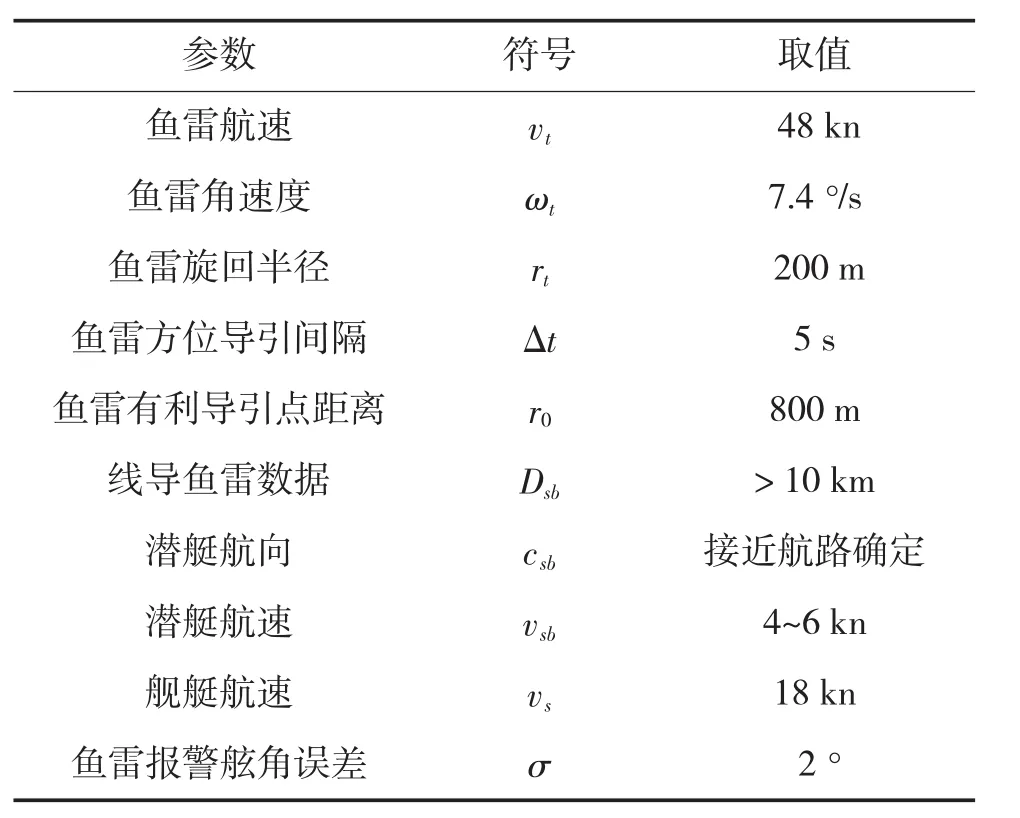
表1 仿真计算参数
2.2.2 仿真结果
不同报警距离,各报警舷角下,鱼雷采取有利提前角弹道攻击和现在方位法弹道攻击时,鱼雷报警舷角的变化如下页图3、图4所示。由表1可以看出,相同对抗态势下,舰艇对来袭鱼雷报警后,鱼雷有利提前角攻击弹道和现在方位法攻击弹道下相对舰艇的舷角变化范围是不同的,考虑鱼雷报警声纳方位误差的影响,有利提前角攻击弹道的舷角变化量有限。鱼雷报警舷角变化范围与鱼雷来袭距离、舷角和判断时间有关,距离越近,变化范围越大;判断时间越长,变化范围越大;鱼雷大舷角或小舷角来袭时,报警舷角变化较小。通常情况下,鱼雷现在方位导引弹道舷角的变化范围大于有利提前角攻击弹道舷角变化范围,在鱼雷大舷角或小舷角来袭时,两种鱼雷攻击弹道下鱼雷报警舷角变化范围比较接近。
3 结论
实际对抗中应根据战场水声环境条件、鱼雷报警声纳性能、作战对象鱼雷性能等,结合舰艇内外部战术情报信息,对来袭鱼雷报警距离进行估计,在一定时间范围内对鱼雷舷角变化进行统计,分析、判断来袭鱼雷攻击弹道类型:
1)在鱼雷非大舷角和小舷角鱼雷来袭情况下,若来袭鱼雷舷角变化范围Δq较小,或基本保持不变,则认为来袭鱼雷处于提前角或有利提前角攻击弹道;若Δq大于某一范围ΔqT,则可认为来袭鱼雷处于现在方位法攻击弹道。具体舷角变化范围ΔqT根据可能的鱼雷距离、对抗对象和判断时间确定。
2)鱼雷报警距离较远,且鱼雷从大舷角或小舷角来袭时,两种攻击弹道相对舰艇报警舷角变化量比较接近,按照保守对抗原则,可认为来袭鱼雷处于威胁更大的现在方位导引法攻击弹道进行对抗。
由以上分析可知,来袭鱼雷舷角变化信息是舰艇水声对抗中的重要决策参考信息,可作为中远距离来袭鱼雷类型识别的重要依据,对提高反鱼雷作战的针对性和有效性具有重要意义。但对于近距离鱼雷跟踪弹道或者滑模控制等新型鱼雷导引弹道的判别方法还需作进一步的深入研究[6]。
[1]陈颜辉,赵晓哲,黄文斌.潜射鱼雷类型识别系统建模与数值仿真[J].弹道学报,2007,19(4):82-85.
[2]陈颜辉,朱伟良,杜毅.潜射鱼雷弹道预测模型与仿真[J].海军工程大学学报,2013,25(2):57-61.
[3]张宇文.鱼雷弹道与弹道设计[M].西安:西北工业大学出版社,1999.
[4]李刚强,黄文斌.线导鱼雷导引方法综述[J].鱼雷技术,2003,11(2):38-42.
[5]赵正业.潜艇火控原理[M].北京:国防工业出版社,2003:228-232.
[6]刘宇,原建平,侯朝焕.水下自导武器导引律研究[J].兵工学报,2008,29(4):483-486.
