一种流水线鸡蛋整理装置的研制
2018-03-05潘乃康轩亮熊文昌李斌
潘乃康, 轩亮, 熊文昌, 李斌
(江汉大学机电与建筑工程学院,武汉 430056)
0 引言
随着人们生活水平的提高,市场对鸡蛋需求量增大,养鸡场的规模也越来越大,但相对而言,养鸡场对于鸡蛋清捡工作不是特别重视,大多数是人工将鸡蛋捡取到鸡蛋盘并转运堆放,这一过程不仅花费了大量的人力和时间,而且还考验了工作者的耐心和技巧,要确保鸡蛋在被抓取的过程中不破裂。另一方面,随着科技高速发展,人工渐渐被机器取代。就养鸡场来说,越来越多的流水线装置取代人工为养鸡场清捡和收集鸡蛋,但这一类的装置不可避免地有电力消耗过大、成本高额、维修困难等缺点。
该流水线整理装置一方面取代人工,节省人力强度,提高鸡蛋的清捡效率;另一方面相比同类产品,不仅具有效率高、成本低廉等优点,而且结构简单,体型上精致小巧,节省电力,方便转移安装,也方便维修。
1 设计方案
1.1 总体方案设计
为了取代人工实现流水线整理鸡蛋,设计要求该装置在工作时按图1来运行。

图1 工作流程图
鸡笼的鸡蛋通过斜槽到达该流水线鸡蛋整理装置,如图2所示,为了完成第一步分拣多个鸡蛋的工作,设计了分拣装置,具有将无序的鸡蛋均匀有序分拣的功能;鸡蛋通过分拣装置后,需要设计一种接蛋装置来完成第二步工作,能安全有效地将鸡蛋接收并放置到处于接收装置下方的鸡蛋盘;对于放置满鸡蛋的鸡蛋盘,需要设计一种传送带来完成第三步工作,将鸡蛋盘输送到下一步的工作区域,考虑到传送带与下一个装置之间有较大的间隙,不利于鸡蛋盘的平稳传送,设计一个过渡装置,用于传送带与下一个装置之间的连接;为了完成最后的鸡蛋盘堆放及转运工作,设计最后的可转移的收集装置,具有收纳鸡蛋盘并自由转运的功能。

图2 流水线整理装置总体结构
1.2 分拣装置设计
这一部分的目标是完成分拣鸡蛋的工作。养鸡场内鸡蛋通过斜槽到分拣装置上,如图3所示,设计了一种分蛋盘来承接这些鸡蛋,为了达到分拣鸡蛋的功能,分蛋盘与水平面有5°的倾角,分蛋盘有5个滑槽。这样鸡蛋在分蛋盘上会受斜面影响,向斜侧5个滑槽滑下。为了让这些鸡蛋能均匀地滑到各个鸡蛋滑槽内,在鸡蛋盘内部设计电动机带动的偏心轮机构,偏心轮机构安装在U形朔料框架上,U形框架一侧与分蛋盘用两个铰链连接,另一侧与分蛋盘可分开,其机构简图如图4所示。工作时电动机带动偏心轮转动,与偏心轮接触的分蛋盘一侧受到铰链约束,只能一侧上下摆动,鸡蛋受分蛋盘的轻微摆动效果,均匀地滑动到5个滑槽内。为了达到鸡蛋分拣的有序性,在分蛋盘上面设计了旋转门,通过一侧齿轮配合传动,旋转门上附有传感器。当受到每一个滑槽内的鸡蛋带来的压力时,传感器感应,电动机转动使旋转门旋转一个相位,让一排鸡蛋顺利滑下,并且挡住了即将到来的鸡蛋,当滑槽内鸡蛋都滑到旋转门时,旋转门再次旋转一个相位。

图3 分拣装置示意图
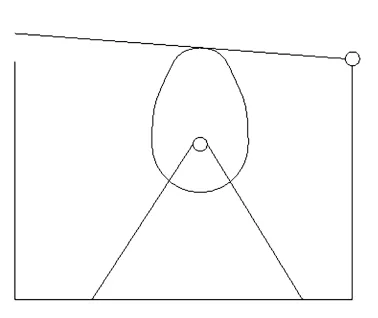
图4 分拣装置内部机构简图
1.3 接蛋装置设计
鸡蛋通过旋转门后,为了依次接到鸡蛋,设计了带有叉子的接蛋装置,如图5所示,叉子通过连杆机构连接,鸡蛋落入接蛋装置,被叉子接住,叉子上的传感器感应,使得电动机带动连杆机构向下运动,叉子受连杆机构的作用向下,最后分开,鸡蛋落入下面的鸡蛋盘,之后叉子受连杆机构的作用又返回到原始位置。考虑到鸡蛋落入叉子上可能会有破损,在叉子上包裹硅胶,这样使得叉子具有一定的弹性,这样保证了鸡蛋落到叉子上时不会与叉子产生强烈的碰撞。
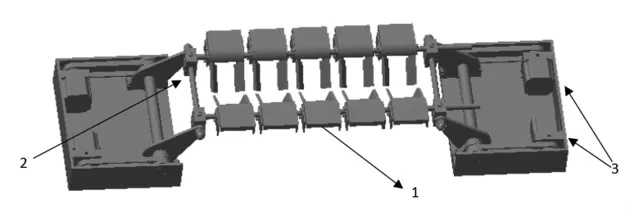
图5 接蛋装置示意图
1.3 传送部分设计
为了简化设计,源于生活用于生活,直接选用传送带输送鸡蛋盘,如图6所示,传送带的支撑架由角钢组成,步进电动机作为动力源,由接蛋装置叉子上的传感器控制,当接蛋装置放置一排鸡蛋,传送带带动鸡蛋盘行进一个蛋距;第二个传送带是过渡装置,如7所示,第1个传送带与下一个装置的间距较大,为保证鸡蛋盘输送的平稳性,设计一个非自动的小型传送带,用于鸡蛋盘在两个装置间的过渡。
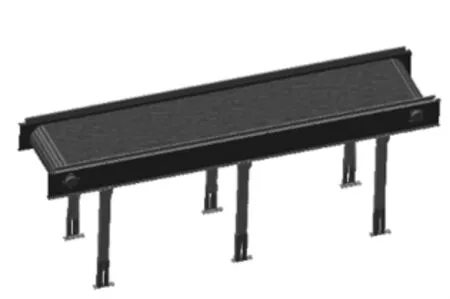
图6 传送带示意图

图7 过渡装置示意图
1.4 收集装置设计
为了达到收集堆放多个鸡蛋盘的功能,设计了一种具有多层结构的收集装置,如图8所示,多层隔板由两根丝杆和两根光杆支撑,每一层可以放置一个鸡蛋盘,收集装置的动力源来自电动机,电动机通过减速器减速后,通过一对锥齿轮变向,与锥齿轮同轴的丝杆转动,带动多层隔板往上移动,其中两根丝杆放在对角处,另外用于支撑的两根光杆放在另一个对角处。当鸡蛋盘由传送带传送到收集装置上的一个隔板时,隔板上的传感器感受到一定压力,控制电动机开始转动,多层隔板受丝杆和光杆的运动往上移动两个隔板的间距,下一个隔板接着接收鸡蛋,当每一层隔板都放置鸡蛋盘之后,传感器控制电动机反转,承载着所有鸡蛋盘的多层隔板随着丝杆光杆运动回到原来位置。为了方便收集装置转运,设计了万向轮和扶手,当一个收集装置所有隔板的都载有鸡蛋时,可以转运走,换第二个收集装置继续接收鸡蛋盘。
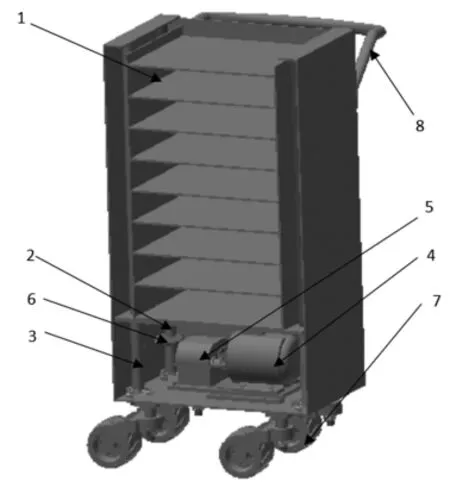
图8 收集装置示意图
2 工作原理
首先,对养鸡场鸡蛋与分拣盘连接传送部分说明一下。将传送带输送机养鸡场的鸡笼配套连接,鸡笼设计为倾斜结构,鸡下蛋后,鸡蛋直接滚到传送带输送机上,再由输送机传到分蛋盘上,进行分拣。
其次,分蛋盘内部有电动机带动的偏心轮机构,当鸡蛋由V形槽直接无序地放入分蛋盘,分蛋盘通过偏心轮机构上下摆动使无序的鸡蛋能分别均匀地进入到5个滑槽内,完成鸡蛋的第一次分拣。在此过程中,鸡蛋通过斜槽引导,由无序方向变成竖向方向经滑槽滑下。
鸡蛋在每个滑槽内后,分蛋盘每个滑槽上设有旋转门,旋转门设有压敏传感器,当每个旋转门都感受鸡蛋时,会同时旋转,控制了每排鸡蛋出来,经后面S形导管滑入下面的鸡蛋盘。因为鸡蛋从斜槽出来时是竖向的,所以当鸡蛋经过S形管出来到下面的鸡蛋盘时会立在鸡蛋盘里面。
第3部分是蛋盘传送装置,蛋盘放在传送皮带上,设置好传送皮带的速度,让鸡蛋每一排每一排落入鸡蛋盘。鸡蛋盘经传送带送到后面的收集装置。在收集装置和传送带上间添加了一个滚轮桥,考虑到传送带与收集装置由于结构影响间距太大,这个滚轮桥装置用于连接传送带和收集装置,将鸡蛋盘更好地传送到收集装置上。
最后一部分是收集装置,收集装置里设计了齿轮传动升降装置,它分有很多小层,每一层可以放一个鸡蛋盘,当一个鸡蛋盘放入第1层时,压力传感器受到一定的压力作出感应,电动机启动,第1层会上升,第2层会接替接收下一个鸡蛋盘。
3 参数设计计算
分拣装置是整个流水线里最重要的部分,考虑到分拣装置内部的凸轮大小对分拣效果有很大的影响,故对凸轮进行参数设计计算,并对与旋转门配合的齿轮进行设计计算。
根据实际禽蛋机摆动幅度要求为200~300 mm范围内,取幅度A=300 mm,则(r+e+r-e)/2=300 mm;那么偏心轮直径d=600 mm;偏心轮转速n=40~80 r/min。
因为每个鸡蛋的质量约为50 g,电动机也只需较小功率即可查机械设计手册得:可选Y~90L-6型号的电动机:P=1.0 kW;n=910 r/min;总传动比i=11~22,取合适传动比i=15。采用双级传动i1=3,i2=5;取z1=17,则z2=51;取z3=19,则z4=95;z1和z2互为质数,z3和z4也互为质数,都符合要求。
取m1=1.5,m2=2, 由d=mz得:d1=25.5 mm,d2=76.5 mm;d3=38 mm;d4=190 mm,查手册可知,齿轮的齿宽系数φd=0.3。
由齿宽公式b=φdd得:b1=7.65 mm,b2=22.95 mm;b3=11.4 mm,b4=57 mm。
齿面接触疲劳强度校核:

齿面接触疲劳强度满足要求。
齿根弯曲疲劳强度校核:
齿根弯曲疲劳强度满足要求。
4 受力分析及强度校核
主要是对分拣鸡蛋的旋转门及配对的齿轮进行强度校核,旋转门主体为朔料框架,齿轮材料为40Cr(调质),在旋转门每一片扇叶上施加鸡蛋撞进时所带来的力,轴上加上力矩,得出校核结果,强度校核如图9所示。

图9 旋转门校核图
由图9可知,轴上的最大应力分布为1.304 MPa,远小于钢的许用应力。
5 结语
该设备通过多个传送带和传感器结合,实现了物品流水线有序传送。该设备可应用于各大小养鸡场,具有高效率清捡鸡蛋的功能,大量减少了对鸡蛋清捡的工作,实现了养鸡场的智能化管理。
[1] 成大先.机械手册[M].北京:化学工业出版社,2004.
[2] 刘鸿文.材料力学[M].4版.北京:高等教育出版社,2004.
[3] 濮良贵,纪名刚.机械设计[M].4版.北京:高等教育出版社,2006.
[4] 路纯红.AutoCAD2004机械应用实例教程[M].北京:清华大学出版社,2004.
[5] 张祖继.机械制图[M].北京:高等教育出版社,2003.
[6] 倪洪涛,从娟,齐云,等.流水线作业在门诊注射中的应用[J].中国实用医药,2008,3(29):193-194.
[7] 徐光祐,李经纬,杨士强,等.面向流水线结构的并行匹配算法[J].计算机学报,1993(2):113-121.
[8] 韩秉成.在机械加工流水线上滲炭[J].机械工厂设计,1957(11):40.
[9] 杨国强.装配流水线的总体设计[J].机械制造,1985(11):17-19.
[10] 胡汛舟.砸铁上料机械化流水线[J].铸造,1960(5):10-11.
[11]宋华明,马士华.考虑流水线平衡的混合装配线排序[J].中国机械工程,2006,17(11):1138-1141.
[12] 林筠,李随成.多品种可变流水线平衡及改善[J].工业工程,2000,3(2):46-49.
[13]王烨青,杨永跃.机器视觉在流水线条形码识别中的应用[J].电子测量与仪器学报,2006,20(6):102-105.
[14] 谷文祥,李向涛,朱磊,等.求解流水线调度问题的万有引力搜索算法[J].智能系统学报,2010,5(5):411-418.
[15] 葛亮,唐志敏.一种支持无符号数的流水线乘法器[J].微电子学与计算机,2002,19(10):17-19.
