软着陆验证试验中月面特性模拟方法
2018-02-27任德鹏党兆龙
任德鹏,党兆龙
(北京空间飞行器总体设计部,北京 100094)
0 引言
高安全、高可靠地实现月面软着陆是探测器开展科学探测的基础。由于该过程不可逆、任务复杂、可靠性要求高,需要进行充分的地面试验验证。美国曾在“阿波罗”计划中开展了旨在提高航天员对登月舱操控能力的着陆验证试验;我国月面探测器研制过程中也建设了综合试验场,对软着陆技术和探测器的设计状态开展了系列验证试验[1-2]。由于地面测控及探测器的制导导航与控制过程均存在误差,导致探测器尚不具备月面定点着陆的能力,软着陆过程经历的月表环境存在一定的随机性。为实现在月面的安全着陆,探测器上配置了多种导航敏感器[3],在着陆过程中需要测距和测速仪实时测量探测器相对月面的高度和飞行速度以对探测器自主导航进行修正,并须同时对一定范围的月面进行光学图像拍照和激光 DEM(数字高程图像)扫描,识别出安全等级最高的月面区域将之作为目标点完成降落。探测器的测距、测速性能及其安全识别能力直接影响着陆结果,与之相关的月面特性模拟是试验设计的一项重要内容。
地形分布是月面的一项重要特性。真实的月球表面分布着大小不同的撞击坑和石块,地势崎岖不平[4]。试验场中月面地形的模拟首先要符合月面真实的分布特征;为充分验证探测器安全区的识别能力,模拟月面还需要能够快速更换并具备多种月面典型地形的模拟能力。月表的反射特性对探测器软着陆而言是另一项重要特性,地面试验中需要考虑月表对可见光、激光和微波反射特性的模拟,以满足导航敏感器的工作条件。
针对月面地形的模拟已有不少学者开展了研究工作[5-7],其途径均按照月面真实地形的平均统计分布规律和撞击坑、石块的形状,在所需范围内随机生成模拟地形,具体的应用背景决定了对月面地形的模拟程度,文献[5-6]主要进行了月球车移动过程的动力学仿真,文献[7]主要进行了着陆过程的稳定性分析,其工作中侧重模拟了与仿真对象有相同尺度的月面地形特征。但这些方法都无法进行多种典型地形的调整更换,更不涉及对月表反射特性的模拟,不能直接满足软着陆验证的要求。
本文基于我国月面探测器的设计状态和试验需求,提出了月面特性模拟的要求和方法,先后支持了“嫦娥三号”“嫦娥五号”探测器的软着陆验证试验,实际效果表明该模拟方法全面满足试验要求。
1 软着陆验证试验简述
我国月面探测器研制过程中,为完成软着陆验证试验分别投产了真实探测器的验证器和试验塔架:塔架通过一根吊绳连接验证器,为其提供竖直向上的恒拉力以实现月面低重力环境的模拟;塔架伺服机构能够跟随验证器的运动,保证拉力的方向性;塔架可提供高度0~70 m、水平16 m×16 m的有效试验空间,其正下方铺设模拟月面;试验中验证器被起吊至试验高度,在塔架拉力的辅助下依靠自身推进系统提供的动力控制飞行姿态和轨迹,期间微波测距测速敏感器、激光测速敏感器发射的电磁波照射至模拟月面上并测得验证器的飞行参数,成像敏感器对验证器正下方 35 m×35 m视场范围的模拟地形进行拍图、反演并识别出安全点,最终在GNC的控制下验证器降落至模拟月面的安全区域内,从而实现对探测器月面软着陆飞行及探测器工作过程的模拟。整个试验系统如图1所示。
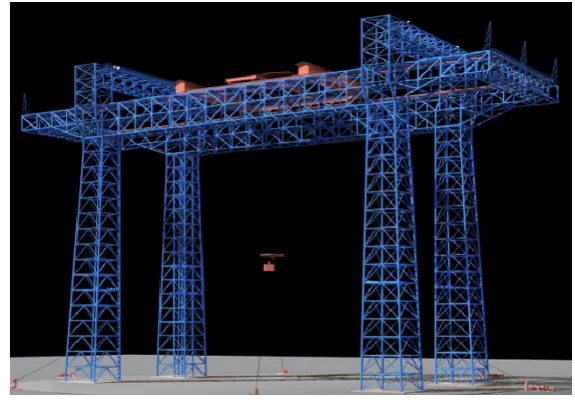
图1 软着陆验证试验系统示意Fig.1 Illustration of the soft landing verification test system
2 月面特性模拟要求
软着陆试验中的模拟月面需同时满足以下指标和要求:
1)试验塔架下方全部为模拟月面,模拟面积为60 m×60 m,以覆盖导航敏感器的视场;
2)模拟真实月表撞击坑、石块和坡度分布,符合月面地形的分布统计规律,并能够实现对不同典型地形的模拟,满足多种试验工况的模拟要求;
3)模拟地形表面颜色与真实月面相符,对1047~1064 nm的激光反射率范围在 6%~30%之间,对34.25 GHz及34.55 GHz的电磁波的反射系数为-5~-30 dB;
4)模拟地形需有明显的地形特征,设置相对的“危险区”和“安全区”,以满足对安全区识别能力的考核,且为保证运动的匹配性,需将“安全区”中心设置在验证器16 m×16 m的运动可达范围内。
3 月面地形模拟
月球表面的探测数据表明,石块和撞击坑是月面地形的主要特征[8],也是月面地形模拟相似程度的主要影响因素。统计结果表明,月面石块和撞击坑的分布规律可以用单位面积内超过某一直径D的石块或撞击坑数目N来表示,即N=aDb[9],其对数表达式为

式中,a、b为分布系数,该值与月面地形相关。“嫦娥”探测器月面着陆区为虹湾或风暴洋,两处均为典型的平坦月海,分布系数取与之对应的数值。
3.1 石块分布及形状
1)石块分布
平坦月海区域石块分布的拟合数学模型[10]可描述为:

2)石块形状
月面上石块的形状多种多样,通常采用其最小与最大尺度的比值(尺寸特征比)来描述,该比值覆盖了一个较宽的范围,一个标准月球岩石的形状被认为是其尺寸特征比介于1和1/5之间。在地形模拟中,对于相同高度的石块,尺寸特征比越小则石块的占地面积越大、其俯视的地形特征更明显。软着陆验证试验中,地形的设置直接考核成像敏感器高程的识别能力,地形特征不宜太明显,因此模拟石块的尺寸特征比按文献[10]的推荐值即1/2设定,既满足考核的目的也便于工程的实施。
3.2 撞击坑分布及形状
平坦月海区域,撞击坑分布规律可以描述为[10]

表1给出了月面撞击坑的类型及其形状。其中新鲜撞击坑具有更清晰的轮廓,在确定坑深模拟要求后,新鲜坑的直径尺寸最小且附带更明显的坑唇,其高程变化更复杂。因此模拟地形中将所有撞击坑均设置为新鲜坑,更符合验证试验的目的。
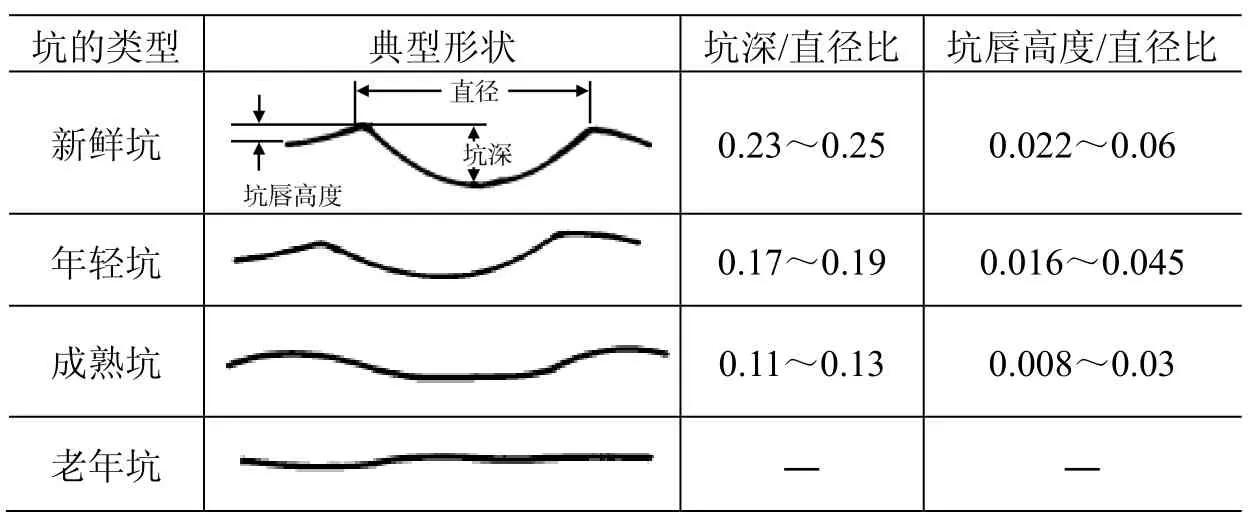
表1 月面撞击坑类型及形状Table 1 Types and shapes of the lunar craters
对于新鲜的撞击坑,假设其外形对称分布,则可采用二次函数来描述其具体的形状。建立撞击坑横截面的坐标系,定义撞击坑深度为Zd、坑唇高度为Zr,如图2所示。

图2 典型撞击坑形状Fig.2 Typical shape of a crater
采用统一的分段函数描述典型撞击坑的具体形状,假设该分段函数为

主坑区的截面曲线可描述为

坑唇区的形状可描述为

采用式(2)、式(3)可确定模拟区内石块和撞击坑的数量分布,式(4)~式(6)可确定撞击坑的形状。在模拟范围内随机确定撞击坑和石块的位置,即可得到符合月面统计规律的模拟地形,采用MATLAB仿真软件获得月面地形的 DEM 图,如图3所示。该区域内存在1440个撞击坑和562个石块,其中撞击坑直径模拟涵盖了0.2~10 m的范围、石块直径涵盖了0.1~2 m的范围。该地形虽然与月面真实情况相似,但撞击坑和石块的数量过多难以实施、且其分布没有规律,无法实现精确考核的目的,因此该地形无法直接用于验证试验。

图3 月面地形模拟结果示意图Fig.3 Illustration of lunar terrain simulation results
3.3 模拟地形调整设计
3.3.1 模拟高程剔除设计
软着陆验证试验中月面地形模拟主要用于对成像敏感器安全区识别能力的考核。受测量精度的限制,成像敏感器无法识别高程差小于0.2 m的撞击坑或石块,且该尺度的地形不影响着陆的安全性,因此试验中对于高程差过小的地形不再进行模拟;对于高程差大于一定尺度的撞击坑或石块,识别软件均将其所在的区域处理为“危险区”进行剔除,以保证探测器的着陆安全,因此高程差过大的地形在试验中也不予模拟。地形模拟中将石块的高径比设定为0.5,撞击坑的深径比确定为0.23~0.25,因此地形的高程与石块及撞击坑的直径有确定的对应关系。模拟地形设计中考虑了高程的剔除,将石块直径模拟范围设定为0.2~1.2 m,撞击坑直径模拟范围选为 0.5~3 m,重新按照式(2)、式(3)确定分布数量,模拟结果如表2、表3所示。可见,设定高程差限制后模拟区内石块的数量减少为36个,撞击坑数量减少为135个,但在设定的模拟范围内,石块和撞击坑的数量仍符合月面分布规律。
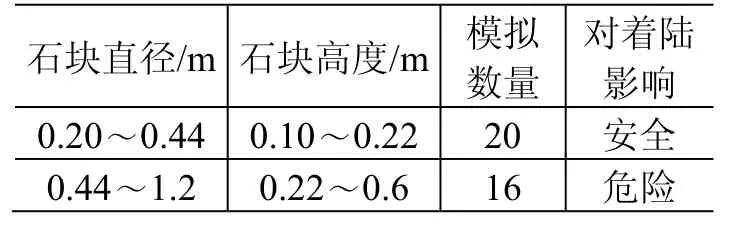
表2 高程差限定后石块的模拟结果Table 2 Simulation results of the bulges under restricted of elevation is restricted
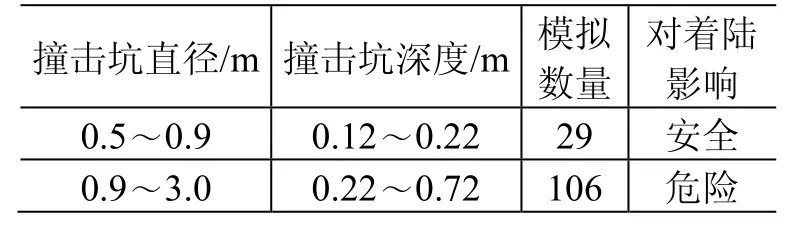
表3 高程差限定后撞击坑的模拟结果Table 3 Simulation results of the craters under restricted of elevation is restricted
3.3.2 安全区分布设计
通过高程剔除后确定了与试验验证相关的石块和撞击坑的数量,按常规的模拟法将在整个模拟范围内随机确定坑和石块的位置,但由于试验中验证器水平运动范围为中心16 m×16 m的区域,随机分布可能导致“安全区”位于验证器可达范围外,势必影响对试验结果的评判。设计中采用分区法解决该问题:在验证器运动可达的16 m×16 m模拟月面,按表2、表3中的安全尺寸设定参数,即石块和撞击坑直径取值范围分别为 0.20~0.44 m和0.5~0.9 m,重新按式(2)、式(3)的分布规律确定数量并随机确定位置,处理后该区域对探测器软着陆而言全部为“安全区”;对于中心区以外的其他区域,在保持表2、表3中模拟总数不变的条件下,将剩余数量的石块和撞击坑随机分布,处理后该区域内包含高程差大于0.2 m的坑或石块,因此对软着陆而言为“危险区”。该方法未改变整个模拟区内撞击坑和石块分布的数量,仅结合试验需求对其位置进行了调整,使模拟地形满足试验需求。经调整后模拟月面的DEM如图4所示,其中方框区域表示验证器运动可达范围。

图4 试验场模拟地形高程模拟Fig.4 The elevation model of the testing ground for lunar terrain simulation
3.4 快速调整设计
软着陆试验需要设置多种典型的地形以充分验证探测器的地形识别能力,对于总面积达 3600 m2的室外模拟月面,不具备随时新建和调整模拟撞击坑的条件。为满足试验要求,模拟月面采用了模块化设计,即按图4的地形要求一次性完成所有撞击坑的建设,并要求所有撞击坑均配有可移动的“坑唇”与“坑盖”,通过改变模拟月面的高程差实现不同地形的模拟。图 5为“安全区”中心坐标为(7.5 m,7.5 m)的模拟地形,该地形设置需要将预设“安全区”内的撞击坑全部盖上对应的“坑盖”,使该区域内高程差小于0.2 m;而“安全区”以外的撞击坑均恢复原模拟状态,局部区域按模拟要求添加少量石块,使其平均高程差大于0.2 m,只有探测器降落至设定的“安全区”范围内才能通过试验考核。采用该方法,模拟月面共组合出10种典型的月面地形,实现了快速调整的设计目标。
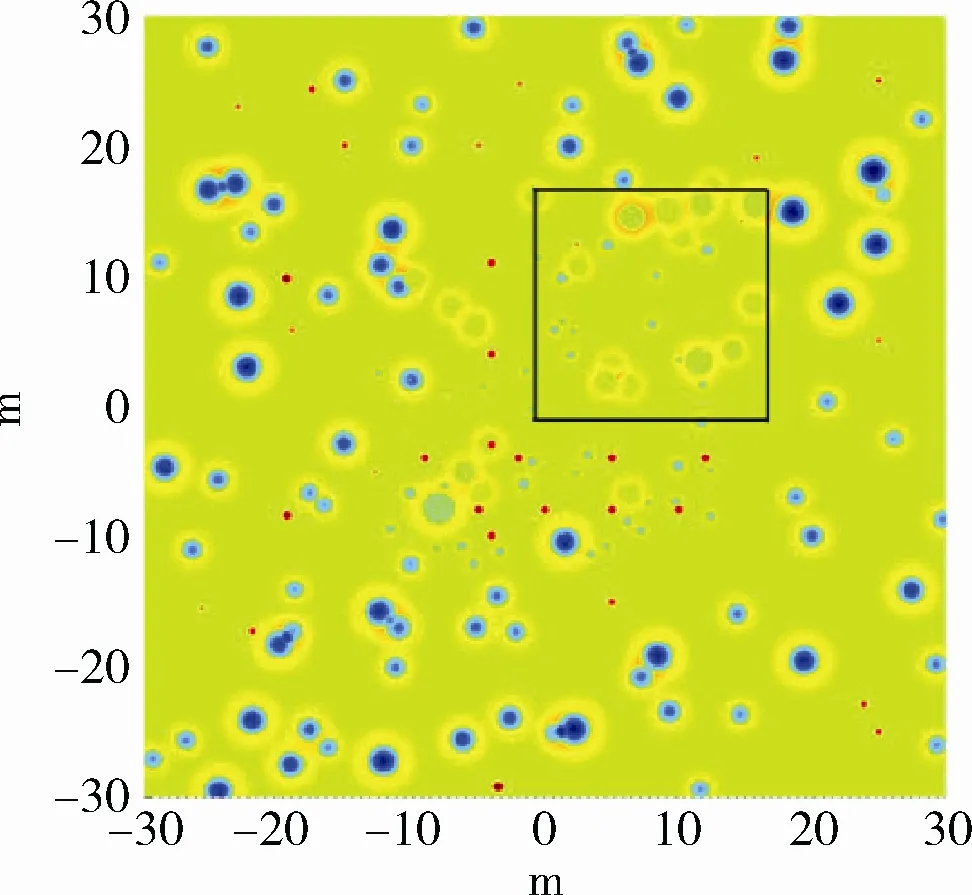
图5 “安全区”位于右上的模拟地形Fig.5 Simulative terrain with the “safe area” at the upper right
4 月表反射特性模拟
为实现对导航敏感器工作性能的验证,软着陆验证试验需要模拟月表对不同频段电磁波的反射特性,为便于试验场室外环境的大面积施工,在大量测试的基础上研制了一种反射涂层,模拟月面外表喷涂该涂层后可满足模拟要求。
4.1 可见光/激光反射特性模拟
反射涂层的本体选用SZ型涂料,其特点是耐腐蚀、附着力强、寿命长,其标准样品为白色,对可见光的反射率为80%左右。为模拟月表对可见光的反射特性,对SZ涂料按反射率25%左右的色板调色后,涂料呈灰色,如图6所示。采用VARIAN Cary 5000型分光光度计对涂料反射率进行了测量,结果如图7所示。可见,调色后涂料对400~800 nm可见光的平均漫反射率约为 0.22,与设计值相符;对 1047~1064 nm 激光的漫反射率约为0.18,符合试验要求。

图6 调色后涂料表面状态Fig.6 Surface states of the coating after palette

图7 涂料对可见光及激光反射率测试结果Fig.7 Test results of reflectivity for the coating for visible light and laser,respectively
4.2 微波反射特性模拟
研究表明,月表对微波的反射是电磁波在月壤中传输特性的表观体现[11],反射系数与月壤的物质成分相关。为模拟月表对34 GHz电磁波的反射系数,在SZ涂料中添加了金刚砂,其主要化学成分为氧化硅、氧化铝和氧化铁,样品如图8所示。添加金刚砂颗粒后重新测试了涂料的表面反射率,与未添加的测试数据最大相对偏差小于2%,即添加物未影响涂料对可见光和激光的反射率。为测试涂料对电磁波的反射特性,制作了一个长宽各为260 mm、厚度为150 mm的混凝土样件,其表面喷涂0.5~1 mm厚的含金刚砂且经调色的SZ涂料,如图9所示。按 GJB 5239—2004的测试方法对样品对34 GHz电磁波的反射率进行了测量,结果如表 4所示。可见,样品对不同极化入射天线发射电磁波的反射率介于-7.0~-18.3 dB范围,符合指标要求。

图8 金刚砂添加物样品Fig.8 Additive sample of silicon carbide

图9 电磁波反射率测试样品Fig.9 Sample for the reflectivity test of electromagnetic wave

表4 测试样品对34 GHz电磁波反射率测试结果Table 4 Test results of the reflectivity of the sample for 34 GHz electromagnetic wave
4.3 模拟月面施工设计
整个60 m×60 m的模拟月面采用整体施工的方案,使用4层不同材料铺设而成,最下面为试验场原位土的夯实层,厚度约为30 cm;其上铺设2 cm左右的灰土,灰土层上方整体浇筑15~20 cm的混凝土,最上面喷涂0.5~1.5 mm的涂层。模拟月面纵向截面结构如图10所示。完成施工后,对模拟月面的表面反射特性进行了复测,各项指标满足要求。
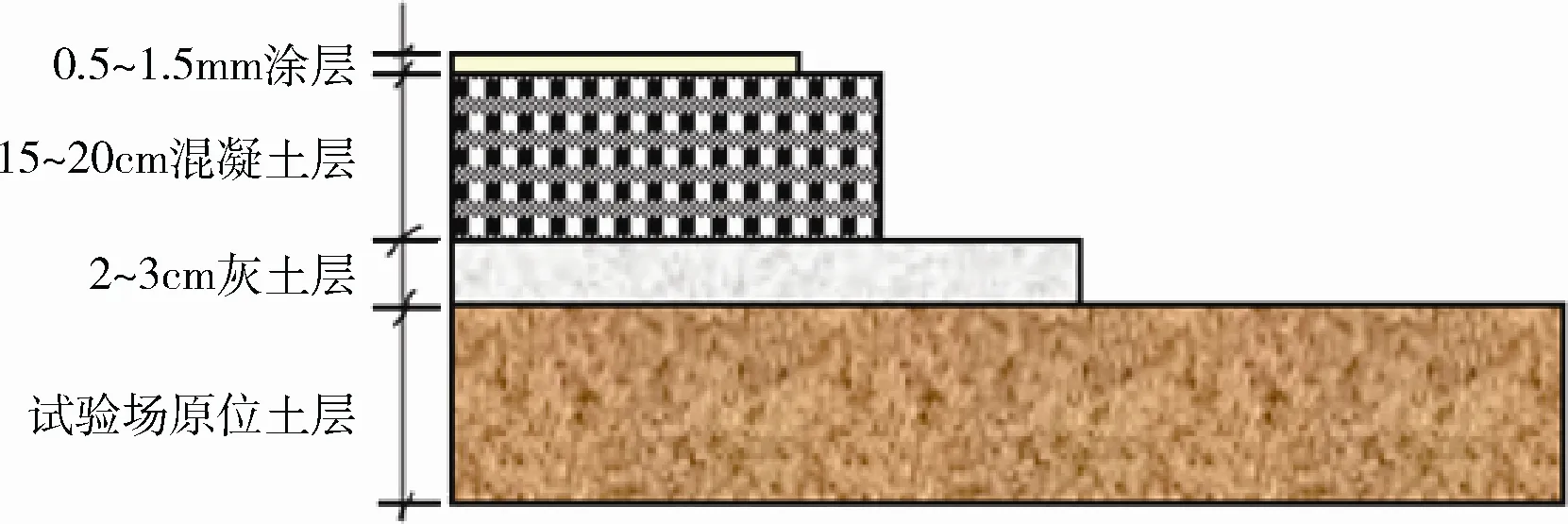
图10 模拟月面区纵向截面示意Fig.10 Illustration of the longitudinal section of simulative lunar terrain
5 试验效果
按本文的方法完成了试验场模拟月面的建设,并先后支持了100余次的软着陆验证试验,各工况试验中月面模拟地形设置正确,验证器微波测距测速敏感器、激光测距敏感器均工作正常,成像敏感器顺利完成了模拟月面成像,并正确完成了安全区识别任务。图11为某试验工况中完成模拟地形设置后,采用地面设备测量的试验场DEM图(局部);图12为验证器成像敏感器对该区域模拟地形的扫描结果。可见两者完全对应,成像敏感器对模拟地形中特征点提取清晰,DEM反演正确。图13是安全区识别软件根据成像敏感器图像完成运算的结果,可见最终选定的安全点位于图像的中心,与试验前设定的结果一致。

图11 试验场模拟地形DEM测量结果(局部)Fig.11 DEM measured results of the testing ground

图12 验证器成像敏感器反演结果Fig.12 Image results of the probe’s imaging sensor
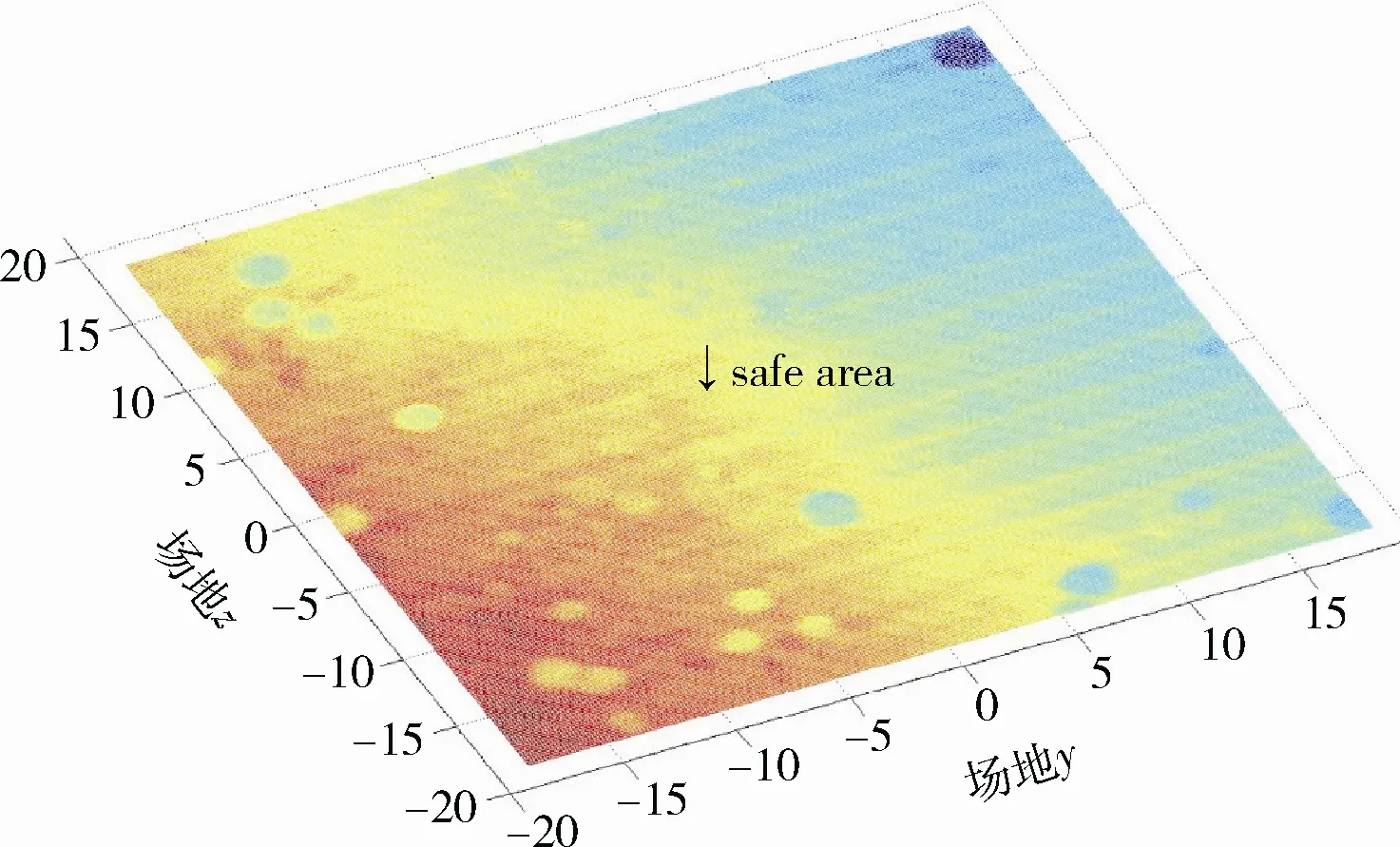
图13 验证器安全区识别结果Fig.13 Identification results of the safe area for the validator
6 结束语
探测器软着陆验证试验中对月面特性的模拟有特殊要求。本文提出的模拟方法符合月面地形分布的规律,在不影响试验目的的基础上对模拟地形进行了简化处理,降低了试验场的实施难度;采用模块化设计思路便于多种地形的快速调整,提高了模拟的灵活性;采用特殊涂料喷涂模拟地形表面,实现了对月表反射特性的模拟。经测试,模拟月面指标满足要求,多次软着陆验证试验中导航敏感器均工作正常,并完成了在预定区域内的安全着陆,实现了对探测器安全区识别及导航控制性能的验证,证明了月面特性模拟方法的正确性和可行性,可为未来我国行星表面探测器及着陆技术的验证提供借鉴。
(References)
[1]叶培建,于登云,孙泽洲,等.中国月球探测器的成就与展望[J].深空探测学报,2016,3(4): 323-333 YE P J,YU D Y,SUN Z Z,et al.Achievements and prospect of Chinese lunar probes[J].Journal of Deep Space Exploration,2016,3(4): 323-333
[2]孙泽洲,张熇,贾阳,等.嫦娥三号探测器地面验证技术[J].中国科学: 技术科学,2014,44(4): 369-376 SUN Z Z,ZHANG H,JIA Y,et al.Ground validation technologies of the Chang’e-3 lunar spacecraft[J].Scientia Sinica Technologica,2014,44(4): 369-376
[3]张洪华,李骥,关轶峰,等.嫦娥三号着陆器动力下降的自主导航[J].控制理论与应用,2014,31(12):1686-1694 ZHANG H H,LI J,GUAN Y F,et al.Autonomous navigation for powered descent phase of Chang’e-3 lunar lander[J].Control Theory & Applications,2014,31(12): 1686-1694
[4]HEWES D E,OBRYAN T C.Operational features of the Langley lunar landing research facility: NASA TN D-3828[R],1967
[5]赵一兵,李琳辉,张明恒,等.用于月球车性能仿真的着陆区三维地形构造方法研究[J].系统仿真学报,2011,23(11): 2429-2433 ZHAO Y B,LI L H,ZHANG M H,et al.Research on landing area of lunar terrain simulation method[J].Journal of System Simulation,2011,23(11): 2429-2433
[6]张伍,党兆龙,贾阳.月面数字地形构造方法研究[J].航天器环境工程,2008,25(4): 301-305 ZHANG W,DANG Z L,JIA Y.Constructing methods for lunar digital terrain[J].Spacecraft Environment Engineering,2008,25(4): 301-305
[7]黄俊,李飞,张熇.一种虚拟月表地形建立方法的研究[J].航天器工程,2013,22(3): 35-40 HUANG J,LI F,ZHANG H.Research of a way of constituting lunar virtual terrain[J]. Spacecraft Engineering,2013,22(3): 35-40
[8]欧阳自远.月球科学概论[M].北京: 中国科学技术出版社,2005: 56-68
[9]CONNOR H F.Development of a lunar surface model for the Apollo 15 landing site-case 310: NASA CR-121359[R].Washington D C: NASA,1971
[10]BATTERSON B,BENSON H,GAULT D,et a1.NASA space vehicle design criteria (Environment): lunar surface models: NASA SP-8023[R].Washington D.C.:NASA,1969
[11]李良格.月壤厚度及介电常数反演研究[D].武汉: 华中科技大学,2012: 9-10
