一种新型装载机构的设计仿真及理论分析
2018-02-26杨丽华陈伟雄
杨丽华,胡 明,陈伟雄
(1.广西大学机械工程学院,广西南宁530004;2.湖南大学机械与运载工程学院,湖南长沙410082)
0 前言
装载机构广泛应用于施工建设工程,主要用于装铲泥土,碎石等散装物料,对于建筑工程施工有着重要意义[1]。利用可控机构设计的装载机构能够避免传统机械装载机构的一些问题。国内外研究者对可控机构、装载机构做了大量的研究,对装载机新技术有了新的展望[2]。国内学者张林[3]对新型装载机构进行了型综合研究,得出了符合机构拓扑要求的拓扑结构图,并且优选出具有开发潜能的可控装载机构。Chuenchom T[4]等对可调机构的综合问题进行了研究。装载机构具有较强的实用性能,具有良好的研究前景。
1 装载机构的机构设计
1.1 装载机构设计工作要求
工作装置是装载机很重要的部件之一,主要由铲斗以及连杆、拉杆、动臂、铲斗托架等组成。装载机在工作中要具有较强的铲掘、运载、卸载等作业能力。合理的装载结构能够是各个构件受力均衡,保证各构件的寿命和强度,使其具有更好的工作性能。设计时应该满足工作要求[5]。
(1)铲斗作为装载机构的容器,铲斗的容积越大,装载机构的工作效率越高。但是过大的铲斗尺寸也会增大阻力,不利于装载机构进行装载,卸料等工作,是机器的整体工作效果达不到最佳状态。因此合理的铲斗尺寸对于装载机构是非常重要的。
(2)保证机构的平稳与协调性能,铲斗在完成铲掘到举升等一系列运输工况时应尽保持作“平移运动”。在工作过程中,避免由于铲斗的不稳定性导致物料洒落。各构件间的转角差必须在一定的范围内,通常要求铲斗的转角差不超过15°.工作装置应该合理设计长度和高度,减小工作装置重心和整机重心的距离。
(3)装载机构的工作装置包括连杆机构,在装载机做作业时避免构件“死点”、“干涉”现象。在满足综合性能的条件下,尽量增大各个机构的传动比。
1.2 装载机构理论分析
本机构设计底座和三角连接杆为三副杆,动臂为四副杆,剩余的七个构件均为二副杆。合理安排运动链杆件并且具体化就可以得到相应的机构简图。机构简图如图1所示:
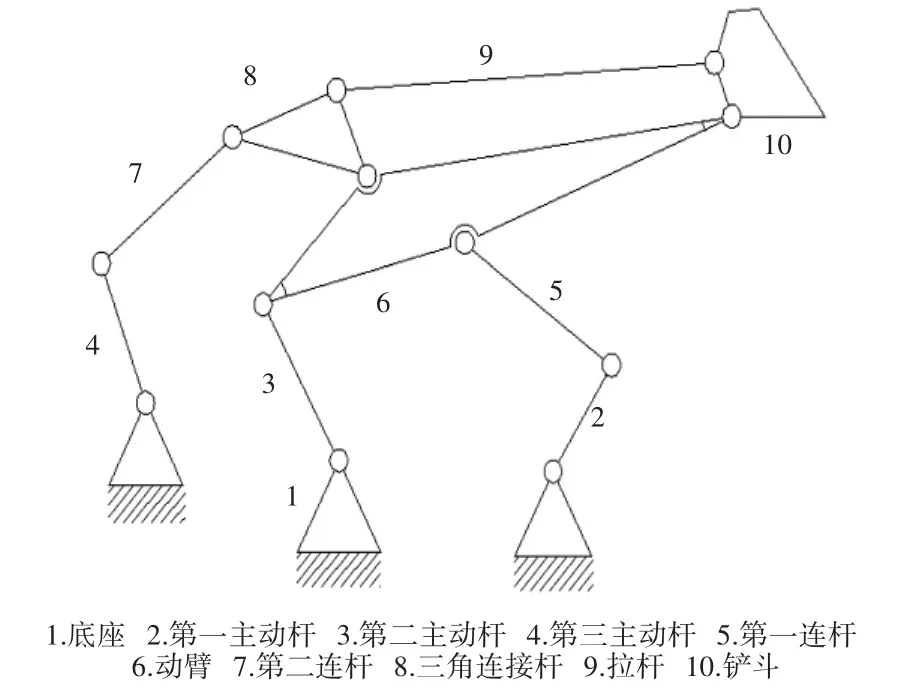
图1 新型装载机机构简图
运动链特定化是根据设计要求和整个机构来分配构件和运动副,包括机架、杆组的判定。双色拓扑图是一种表示运动链运动副和构件联结关系的拓扑图。在双色拓扑图中,黑色实心点代表构件,白色空心点代表运动副,当构件和运动副相关联是用一条边联结起来。该装载机构运动链简图和双色拓扑图如图2所示:
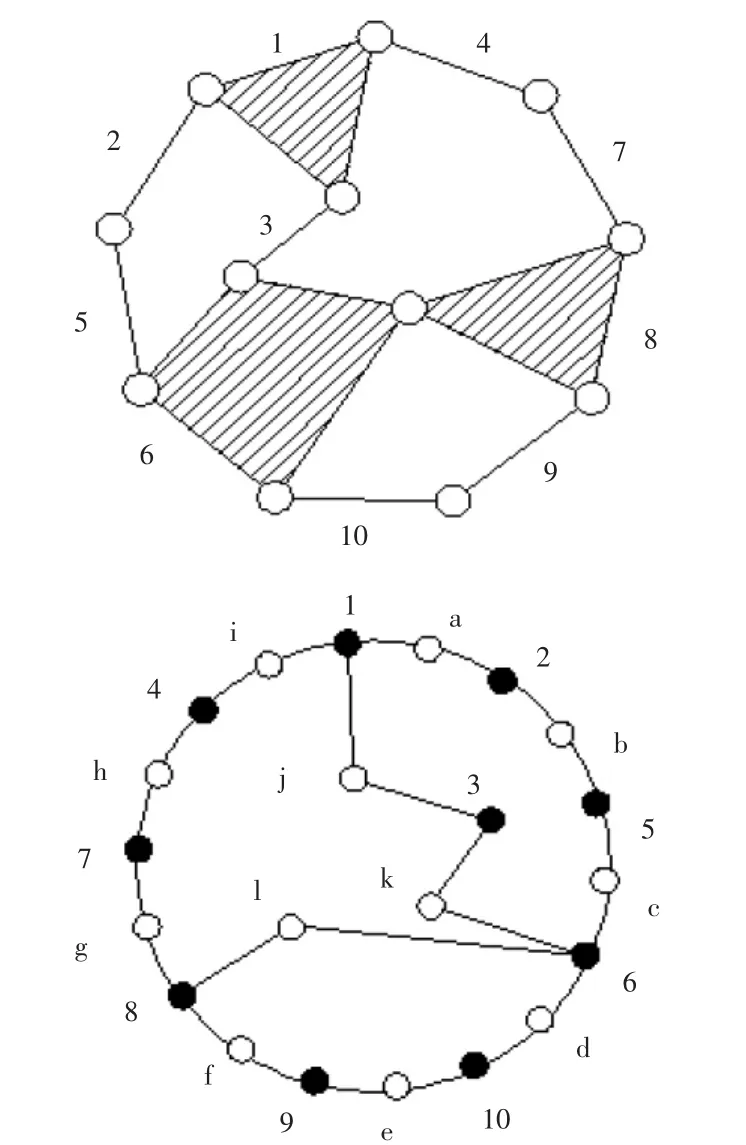
图2 运动链简图和双色拓扑图
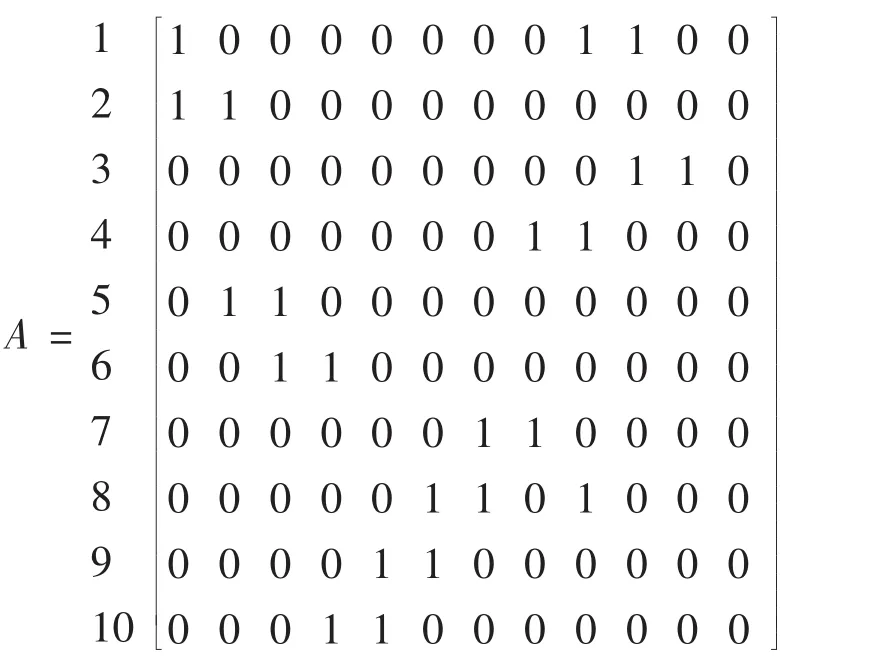
设有运动链的拓扑图表示为G(v,e),则其相应的关联矩阵定义为:

根据上图所示的双色拓扑图,该机构的关联矩阵为:
根据装载机构设计的要求,设计出装载机的基本构型和各个构件的基本尺寸。用Slidworks软件画出各个零部件,其装配好的三维图如图3所示:
该装载机构主要由底座、三个主动杆、两个连杆、动臂、三角连接杆、拉杆和铲斗组成。主动杆由伺服电机驱动,在各个杆件共同作用下使得装载机构末端在控制下以一定的位姿到达一定的位置。底座、第一主动杆、第二主动杆、第一连杆和动臂构成一个五边形。动臂、拉杆、铲斗和三角连接杆构成四边形,其作用可以增强机构整体的稳定性能和提高机构的刚度,能更好地让装载机构完成各种工况下的作业,使得装载和卸料等作业更加平稳的进行。多自由度可控机构的运用可以使得以前单一的串联机构得到有效的改善。
2 装载机构运动学仿真
多体动力学仿真分析软件ADAMS是对机械系统运动学和动力学进行仿真分析,在开发出真实的样机出来之前,可以简单的对产品进行各种性能测试来降低产品的生产成本[6]。在三维软件Solidworks中画好三维模型后保存以Parasolid(*.x—t)的格式导入到Adams中,在Adams中进行环境参数设置,对各个构件材料设置,添加约束副,给主动构件输入驱动函数,通过软件仿真,得到机构末端的位移、速度、加速度曲线。在样机仿真中用step函数进行驱动控制,step函数[7]的格式为
step(x,x0,h1,x1,h2)。对于主动杆 1 的位移函数设置为:
step(time,0,0,1,10d)+step(time,1.0,0,2,-10d)+step(time,2,0,3,-15d)
主动杆2的驱动函数设置为:
step(time,1.5,0,2,10d)+step(time,2,0,2.5,35d)+step(time,2.5,0,3,15d)
设置好环境参数,设置仿真时间3 s,并且对主动杆设置驱动条件然后进行运动学仿真,得到的装载机构末端的位移、速度、加速度曲线如下:
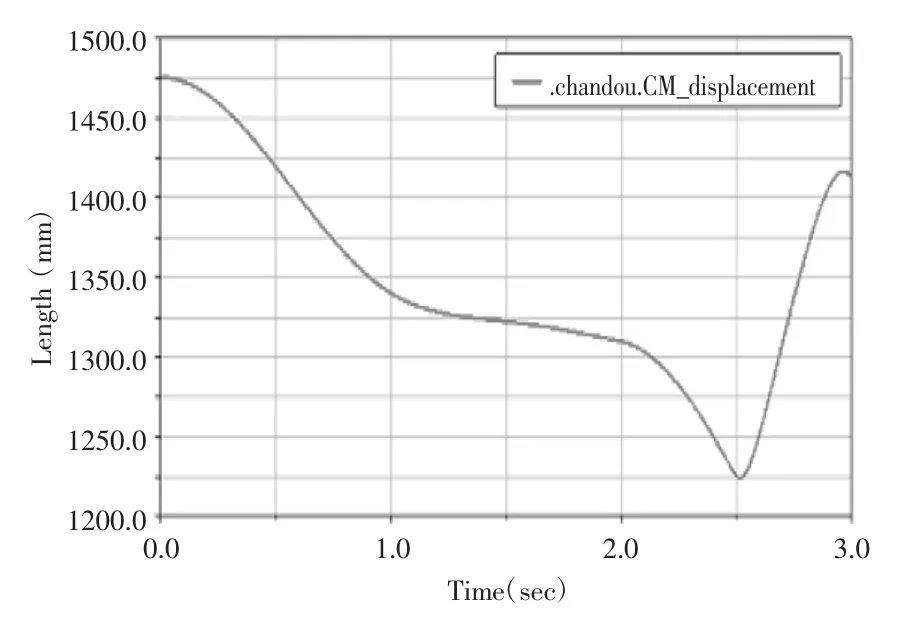
图4 铲斗末端位移曲线
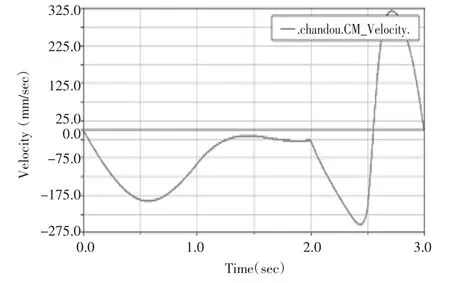
图5 铲斗末端速度曲线
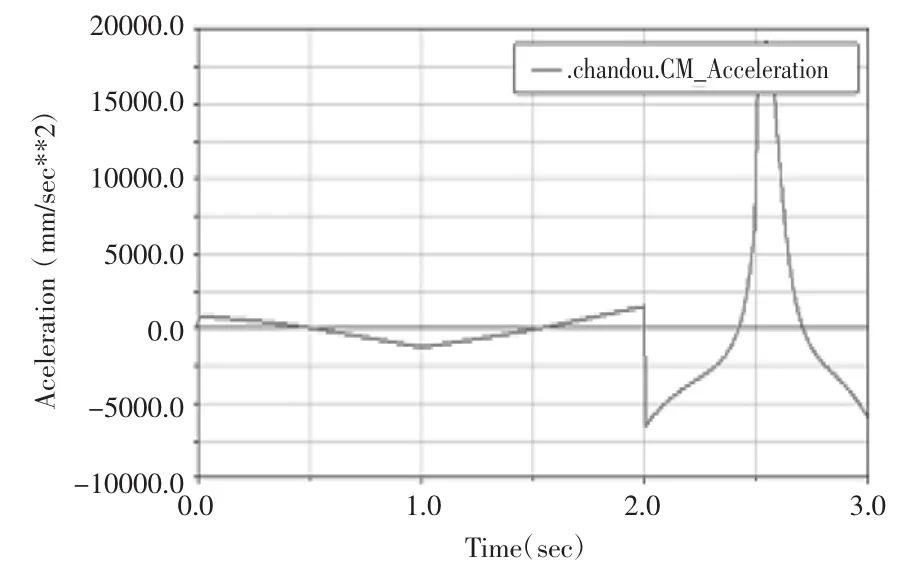
图6 铲斗末端加速度曲线
从铲斗的曲线图可知,铲斗位姿在工况下平稳移动,完成举升和卸料的基本循环动作,作业的总体过程基本符合实际运动。结合位移曲线图和加速度曲线图,加速度在拐点处突然上升或者突然下降表示装载机铲斗末端在上升或者下降。通过仿真的得到的数值可以代入相关运动学公式检验样机的设计是否具有合理性。在进行运动学仿真后,通过Adams里面的review功能中的create treate spline命令,得到装载机构铲斗的运动轨迹曲线,如图7所示。
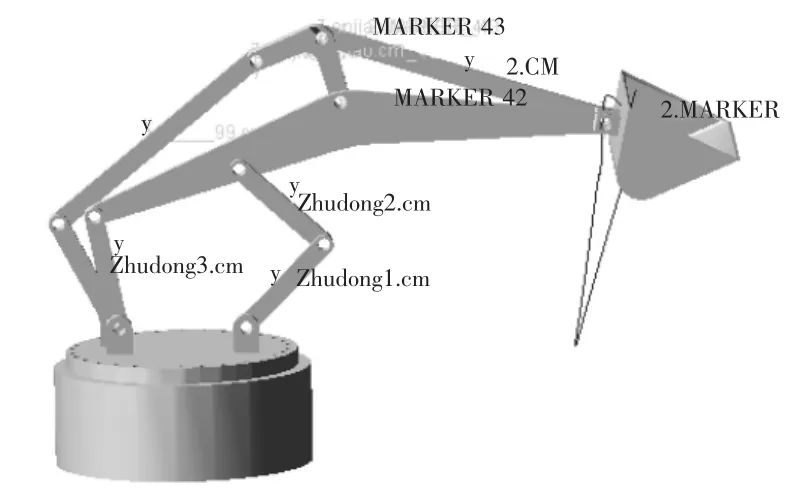
图7 铲斗轨迹曲线图
从上图中可以看到,设计的装载机构在驱动程序下先往上举升,然后往下卸料,再往上举升,使装载机构完成一个简单的循环动作。在不同的工作环境下,可以设置不同的驱动函数,得到多样的输出轨迹。
3 结论
利用可控杆件设计了一个构型简易的装载机构,分析其机构简图、运动链图及双色拓扑图,得到其关联矩阵。利用Adams建立样机模型进行仿真分析,得到铲斗末端的位移、速度、加速度曲线以及末端轨迹曲线图,验证所设计机构的可行性,其研究为可控装载机构提供了一定的基础。