电子吊舱中继平台阵列天线设计
2018-02-13井浩宇
井浩宇,汪 洋
(中国人民解放军92941部队,辽宁 葫芦岛 125000)
0 引言
随着电子干扰吊舱在训练装备中越来越广泛的应用,可通过在电子干扰吊舱内安装遥测遥控系统实现对低空大射程目标的实时测控。文献[1]介绍了电子吊舱在试验中的应用特点及需要重点解决的关键技术,包括吊舱内设备小型化技术、频率收发干扰和隔离技术以及设备的宽范围工作技术等,但是文献[1]并没有对设备小型化和频率收发隔离方法做进一步阐述。文献[2]对飞行测试吊舱遥测遥控系统进行了介绍,但其方案中并没有采用阵列天线,而且传输数据速率也较低,与本系统要求的技术指标差别较大。本系统吊舱采用外挂吊舱形式,吊舱内部安装遥测遥控系统,其中的遥测遥控系统主要包含阵列天线、收发组件、馈电网络、波束控制系统、转发器和电源等设备,由于电子吊舱有效结构尺寸非常有限,严重制约了遥测遥控系统的总体指标的设计。通过在吊舱安装前后视渡越阵列跟踪天线,保证了天线波束对吊舱头部和尾部的无缝覆盖;通过采用收发全双工两维电扫阵列天线,较好地解决了天线波束的跟踪、扫描和波束覆盖问题;通过采用天线与射频信道一体化设计技术,减轻了设备重量。通过采用以上措施,较好地解决了阵列天线增益、波束覆盖、重量体积与吊舱空间受限的矛盾,提高了对低空大射程目标实时测控的连续性、有效性和可靠性。
1 总体设计
在电子吊舱内部安装遥测遥控系统,除了对设备的体积、重量和功耗有特殊要求之外,还需要解决的关键问题是阵列天线增益和天线的覆盖范围。
1.1 天线波束覆盖范围设计
在不稳定平台上,如何既能保证天线覆盖范围,又能实现天线波束的稳定跟踪,文献[3-7]分别从抗摇摆、角度补偿和伺服控制等方面进行了论述,但是存在体积和重量大的问题,不太适合于吊舱安装。本系统电子吊舱舱体前后两端采用了透波材料设计,而舱体则是屏蔽体,为了保证天线波束能够对吊舱底部全覆盖,采用了前后视渡越阵列跟踪天线和收发全双工两维电扫阵列天线相结合技术。
在电子吊舱头部、尾部分别安装前视、后视天线,技术指标要求相同。天线形式为S/L双工相控阵天线、S频段接收采用右旋圆极化和L频段发射采用左旋圆极化。电子吊舱天线系统工作原理如图1所示。

图1 天线系统工作原理
电子吊舱天线系统采用二维电扫相控阵天线,为了满足系统对天线增益要求,并结合载体所能提供的安装尺寸和功耗,天线采用平面阵列形式;为了减少移相及馈电网络的损耗,采用分布式功放的设计方案。系统主要包括2套相控阵天线和1套天线控制器,2套相控阵天线分别位于吊舱的两端,天线控制器位于吊舱的中部。天线控制器包括电源模块、信号处理板、接口板和跟踪接收机(含收发开关、数控衰减器)等,封装于一个金属屏蔽壳内。遥控发射天线为L频段,遥测接收天线为S频段,L、S频段天线极化方式均为圆极化,电扫范围为俯仰±60°、方位±60°。天线单元通过电桥分出2路:一路为右旋圆极化接收;一路为左旋圆极化。馈电网络包含1路发射、2路接收,共3套馈电网络。在接收网络中,将阵面均分为4个子阵,实现俯仰差、方位差与和路信号,3路信号通过单通道,天线控制器跟踪接收机提取角误差和AGC电平实现天线单脉冲跟踪,角度跟踪精度不大于2°。
1.2 天线与射频信道一体化设计
文献[7-12]分别从天线阵元设计、天线和差波束成形、天线波束控制等方面对阵列天线的设计进行了论述,但都是各自独立作为一个部件设计,没有采用一体化设计。收发共面相控阵天线采用一体化设计技术,主要包含电源模块、信号处理模块(含波控器)、射频模块(T/R组件)及天线阵面。结构外形如图2所示。

图2 收发共面相控阵天线结构
系统采用频分全双工设计,天线覆盖收发频段,因此收发模式不需要通过信号控制切换。接收模式下阵面相关单元收集空间中的电磁信号,并转发给后级接收通道,经幅相调制合成后发给主机;在发射模式下,由主机发出的射频信号经过功率分配并幅相调制后,发送到天线阵面上,由阵列相关单元辐射到空间中。阵列天线波束指向由信号处理模块(波控器)控制,整个执行过程仅包括波控器接收指向更改指令、波控器计算各单元移相数,并发送至各移相器以及移相器等。整个系统的波束捷变响应时间为μs级。
电子吊舱头尾部端框可以安装尺寸325 mm×475 mm×150 mm,改造后承重35 kg,但考虑结构件和外围棱角跟吊舱天线罩干涉影响,实际天线有效尺寸为300 mm×380 mm。天线需在方位/俯仰方向扫描60°,按照波束扫描后不出现栅瓣的条件,则单元间距D需要满足:
D≤λmin/(1+cos60°)=86.9 mm。
系统整个阵列边长L不超过300 mm,则单元间距D=L/5=60 mm,满足扫描60°不出现栅瓣的条件。阵面的俯仰、水平方向外侧还需要20 mm、25 mm的金属边框用于安装和固定,因此天线俯视尺寸为350 mm×300 mm。天线阵面设计6×6个阵元,阵列单元间距dx=50 mm,dy=60 mm。每个天线单元与1个T/R组件相接,整个天线共需要6×6=36个收发组件。天线单元由正交振子组成,尺寸为50 mm×50 mm×53 mm。因为收发模式的频率与极化各不相同,因此每个阵元都包含2个独立的辐射单元,这2个辐射单元在垂直方向上堆叠,并通过各自的馈电实现频分双工。垂直方向上天线阵面分4层:天线罩、空气(隔离天线与天线罩)、天线主体和金属基(包括结构强度的考虑并作为天线接插件的安装基础),4层结构总厚度为25 mm,T/R组件、波控器等模块厚度为60 mm,因此总厚度在80 mm以内,重量30 kg。
1.3 天线功耗设计
阵列天线由于阵元数目多、布局密集、T/R组件多等原因,造成了阵列天线散热困难等问题,因此阵列天线单元的功耗设计就尤为重要。文献[13-15]就天线的流道布局、热传导的冷却方式等散热措施进行了讨论。本系统整个阵列共6×6=36个天线单元,当L波段发射天线EIRP值为30 dBW时,天线阵列增益为15 dB,发射组件功耗为30-15=15 dBW=31.6 W。发射天线阵面共36个发射组件,每个单元按1 W计算,共36 W。发射组件效率按30%计算,36/30%=120 W。接收天线阵面每个组件按0.5 W计算,为36×0.5=18 W。波控器功耗按5 W计算。若电源转换效率按照75%计算,收发同时工作时整个阵列功耗为:(120+18+5)/75%=191 W;系统采用28 V 供电,电流I=191/28=6.82 A。系统收发分时工作,整个阵列功耗为发射通路功耗 (5+120)/75%=167 W。接收通路功耗为18/75%=24 W。28 V供电,电流I=166.7/28=5.95,约为6 A。
L波段发射天线设计有2个工作状态:大功率和小功率。刚加电时,天线处于小功率状态,不加射频信号,功率一般60 W左右。整个阵面全开射频时,为大功率状态。
2 天线增益仿真
阵列天线增益是系统关键技术指标,其仿真结果分别如图3和图4所示。
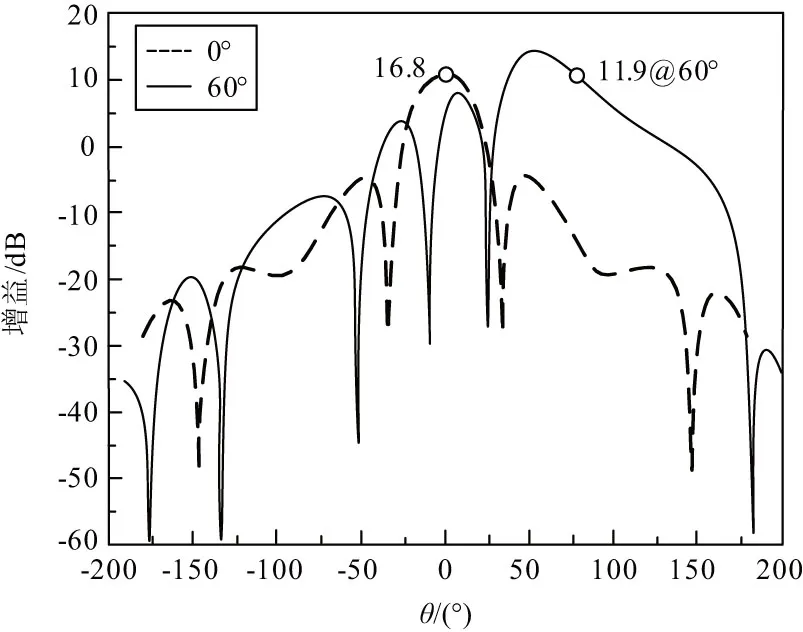
图3 L频段0°,60°天线方向图

图4 S频段0°,60°天线方向图
由仿真方向图可以看出,L频段发射天线法向增益16.86 dB,S频段接收天线增益19.65 dB,这是理想情况。考虑相控阵天线工程实现与仿真差异以及互耦的影响,相控阵馈电网络的插入损耗按2 dB考虑,天线法向增益L频段发射天线增益14.86 dB,S频段接收天线为17.65 dB;天线扫描角度在60°以内时,发射频段增益不小于9.9 dB,接收天线增益不小于12.5 dB。
不管是阵列天线还是抛物面天线,天线增益与天线的口径密切相关。本文采用S/L双波段单元天线设计,与L、S单波段相比有效地增加了天线口径,确保了天线阵列的增益,较好地解决了阵列天线增益与吊舱空间受限的矛盾。
3 天线安装角度设计
系统主要用于对低空大射程目标的实时测控,目标在载机下方一侧飞行,水平投影距离15 km;载机平台挂吊舱飞行高度8 km。在目标发射功率为4 W时,弹上发射天线增益-2 dB,对海面目标安全裕量12 dB,遥测码率2 Mbps,接收机灵敏度-98 dBm,电子吊舱对海作用距离50 km。如目标速度快于载机,按照远距离跟踪最大增益法向对准目标的原则,得出电子吊舱前后天线方位外倾20°,俯仰下倾10°较合适。俯仰和方位倾角分别如图5和图6所示。

图5 天线俯仰下倾10°

图6 天线方位外倾20°
4 结束语
本文依据电子吊舱有限的空间尺寸、重量和功耗,采用全固态收发双工相控阵方案及天线与信道一体化设计思路,有效降低了馈线损耗、提高了天线增益。根据应用需求,提出了电子吊舱前后天线安装角度,可实现对目标穿越电子吊舱前、后、侧面和下方时天线波束的全覆盖。经仿真分析和测试,可满足系统设计要求。该设计思想对于受限空间内的系统设计具有较好的参考意义。
