电磁跟踪系统大型三轴正交磁敏传感器设计*
2018-02-05方虎生沈新民
殷 勤,方虎生,王 东,沈新民
(陆军工程大学野战工程学院,南京 210014)
六自由度电磁跟踪定位系统根据法拉第电磁感应定律研制的空间跟踪定位装置,可实时地确定目标的6个参数[1-2],在机载火控系统[3]、精密医疗器械[4-5]、虚拟现实系统[6]、作战模拟训练[7]、管道缺陷无损检测[8]等方面获得了广泛应用。现使用频繁、精度较高的两种电磁跟踪成型产品是Ascension公司的Flock of Birds系列和Polhemus公司的3Space Fastrak系列。交流式六自由度电磁跟踪定位系统一般采用三轴正交磁敏传感器作为系统发射、接收天线。现广泛采用的是球形磁芯三轴载流圆环线圈形式的磁敏传感器。由于其尺寸一般较小,有效辐射距离较近,无法满足远距离精确跟踪定位的要求,限制了其在合成孔径雷达阵元误差校正等其他方面的应用[9]。
现在电磁定位系统国内外研究主要侧重于定位模型算法精度和误差矫正,尤其医学方面的应用研究比较广泛,系统定位距离一般在1 m以内,对于更远距离的应用研究开展较少。为了拓展系统应用范围,增加系统跟踪定位的有效距离,在进一步提高收发电路功率的基础上,还需要对电磁跟踪系统所使用的三轴正交磁敏传感器进行大型化设计。而在实际设计过程中发现,由于磁芯加工工艺的限制,进一步增加球形磁芯尺寸的难度相当大。同时,为了实现三轴正交均匀磁场,需要对三轴线圈进行嵌套,3个方向使用圆环线圈会很困难,其均匀空间会很小或者线圈将很庞大[10]。
针对球形磁芯圆环结构三轴磁敏传感器的不足,考虑立方体的几何结构有助于较为精确保证三轴线圈的正交性和共心性,提出了一种采用正方体磁芯载流方环结构设计大型三轴磁敏传感器的方案。首先分析了载流方环线圈空间磁场分布规律,验证其满足偶极子模型基础的电磁跟踪定位系统建模原理。综合考虑正方体磁芯载流方环磁敏传感器的磁芯材料、线圈匝数、导线类型、绕制方式等影响因素,研制出一套大型三轴正交磁敏传感器。利用设计的大型磁敏天线,进行了电磁跟踪系统实验,在较远距离上实现了跟踪定位的功能,验证了设计天线的实用性和有效性。
1 载流方环磁场分布
六自由度电磁跟踪定位系统工作时采用时序激励的方式,分别向三轴线圈依次馈以低频正弦电流,三轴线圈依次产生磁场。由于任意时间内只有一个线圈工作,其数学模型可以等效为平面中的闭合载流环。现采用载流方环线圈的形式,需分析其磁场分布情况,验证其是否满足电磁跟踪系统模型建立的基础。
设一正方形电流环,边长为2(a),如图1所示。
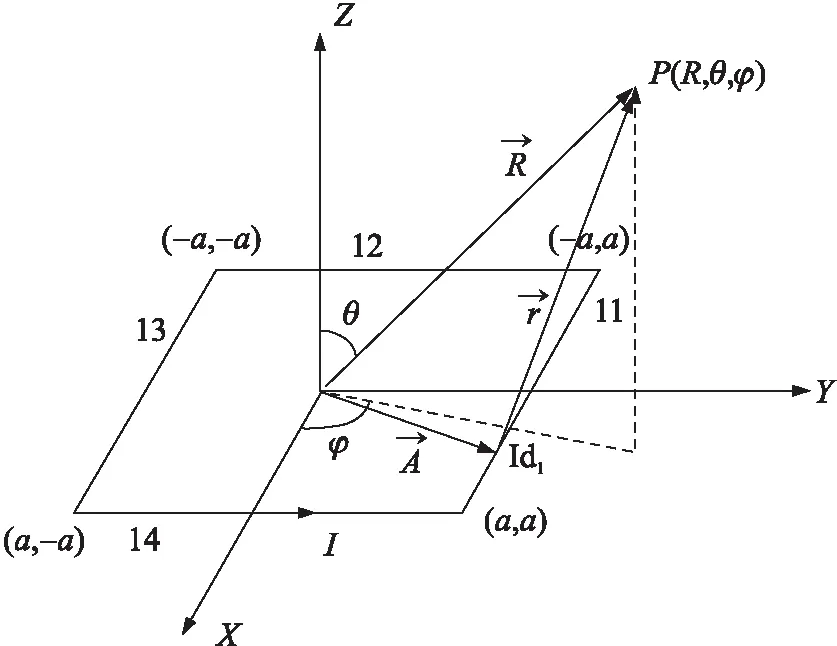
图1 方电流环示意图
根据毕奥-沙伐定律可知,方电流环在P点所产生的磁感应强度为[10-12]:
(1)
如图1所示,有:

通过积分,可得上述4个分量的表达式,则载流方环的磁场表达式如下:
(2)
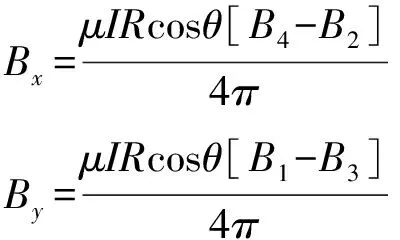
式中:B1,B2,B3,B4如下:
电磁跟踪定位系统是以磁偶极子模型为基础建立系统跟踪定位模型的,现广泛采用的为载流圆环形式磁偶极子模型,根据上述计算的载流方环磁场表达式,可以对载流圆环、方环线圈二者空间磁场分布规律进行验证。设置载流方环线圈和圆环线圈面积相等,通以相同的激励电流,对二者的磁场进行数值仿真,图2显示了磁场分量Bx随距离的变化规律,图3显示磁场分量By随距离的变换规律,图4显示了磁场强度分量Hr随角度θ的变化规律,图5就二者方向图进行了对比验证。
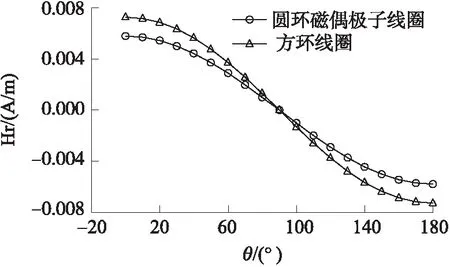
图4 Hr随角度θ变化规律
由以上比较结果可知,当场点距离源点的定位距离满足R>10a时,载流方环线圈磁场变化规律满足圆环线圈磁场变化规律,符合电磁跟踪系统磁偶极子定位模型建立原理,因此可以采用载流方环形式设计磁敏传感器。
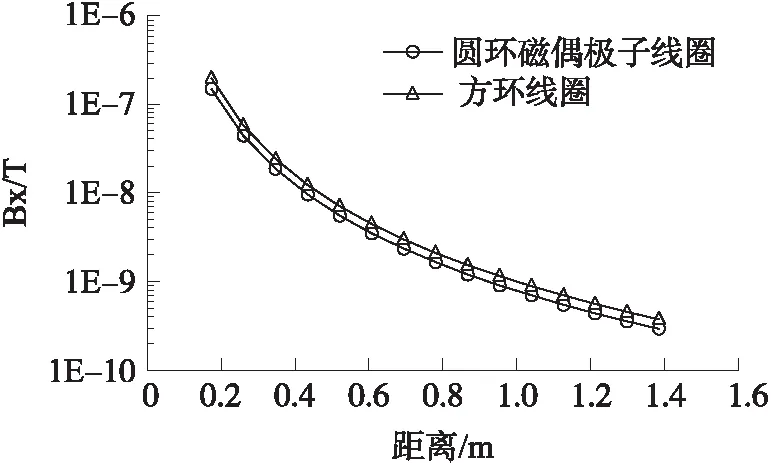
图2 Bx随距离R变化规律
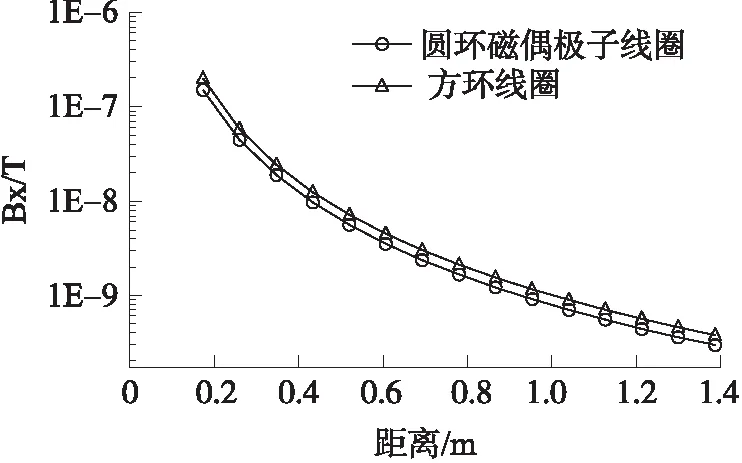
图3 By随距离R变化规律
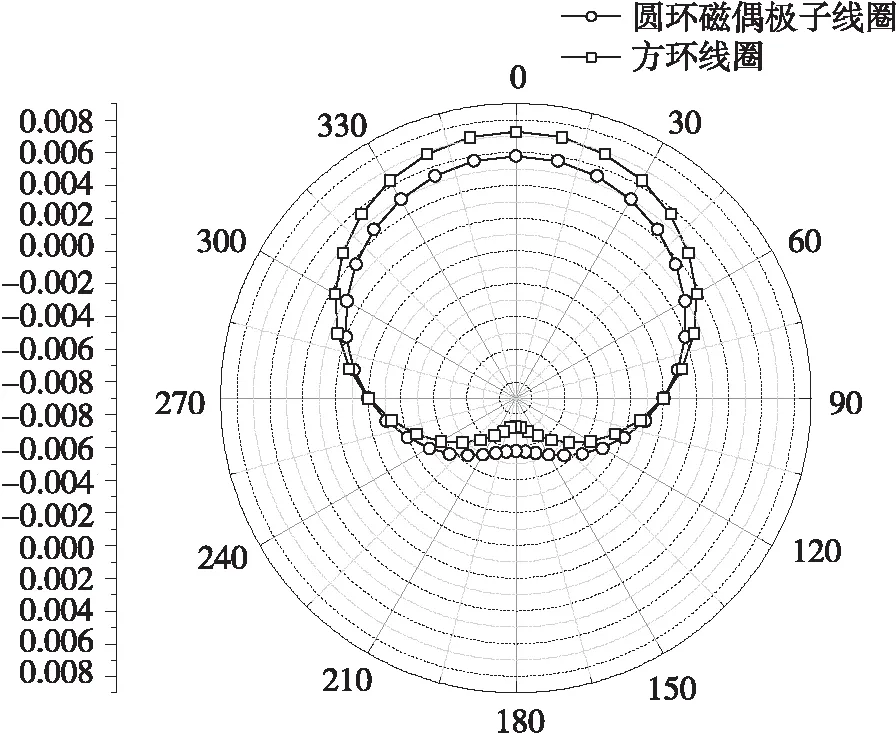
图5 方向图比较
2 三轴正交磁敏传感器设计
三轴正交磁敏传感器的参数设计涉及线圈匝数、导线线径、线圈激励电流、激励电流频率、磁芯导磁率等有关。其中电磁定位系统中线圈的感应电动势与线圈匝数、线径、激励电流大小和频率均成正比关系。但是考虑到设计加工的实际情况,需要综合考虑各项因素,科学合理设计上述参数。
2.1 磁芯设计
为了提高磁敏传感器的有效工作范围,可以从增大磁芯尺寸和提高磁芯相对磁导率μr两个方面进行改进。
三轴磁敏传感器磁芯一般采用软磁铁氧体材料。铁氧体的性能并不仅仅由其化学成分及晶体结构决定的,还需要研究和控制它们的密度、晶粒尺寸、气孔率以及它们在晶粒内部和晶粒之间的分布等。因此,设计加工高性能大功率铁氧体材料,配方是基础、烧结是关键。为了保证烧结透彻,铁氧体材料内部性能均匀,大型立方体磁芯是难以一次烧结成形的。本方案采用由小型长方体形磁芯通过无缝黏合技术组装成大型立方体磁芯。实际设计中,烧结的长方体磁芯块尺寸为100 mm×100 mm×25 mm。通过磨加工处理后采用黏合技术,组装成200 mm×200 mm×200 mm的立方体磁芯供后续设计使用。
磁芯材料选用软磁铁氧体材料,对其性能的要求主要有:起始磁导率高;损耗低;截至频率高;对于温度、振动和时效的稳定性高;其B-H关系应为良好的线性,体积、重量尽量小,磁芯材料均匀无缺陷。通过比较,选用南京金宁三环富士电气有限公司的锰锌软磁铁氧体材料6H20。该材料具有低磁芯损耗、高饱和磁通密度、性能优、价格低、应用广的特点,其技术参数如表1所示。

表1 低损耗铁氧体材料
2.2 三轴载流线圈的设计
线圈绕制匝数的选择要考虑两方面的问题:匝数多,灵敏度高,对于提高测量精度和减小体积重量有利,但对于给定尺寸的磁芯而言,线圈宽度受到限制,匝数过多导致层数过多,给绕制带来困难,线圈绕制不规则影响正交性,又影响测量精度。同时,线圈的电阻与匝数成正比关系,电感与匝数成平方关系,天线匝数的增加,电感将大于电阻变化,影响磁敏传感器的动态范围[13]。
线圈匝数的选择还与线径有关。一般,采用较细的线径允许绕更多的匝数,但线径太细,功率损耗就大,所以线径粗细的选择主要取决于损耗和功率容量。
综合考虑磁敏传感器的灵活性、大小、体积、重量、动态范围和制作工艺等方面的因素,采用0.2 mm的漆包铜线绕制,匝数为200。采用双层(偶数层)绕制方案,交叉绕制,保证居中,有利于提高三轴正交性。线圈根部引出线进行绞制,减少耦合噪声的影响。

图6 大型三轴立方型磁敏传感器
在上述理论分析和方案设计的基础上,研制了一套三轴磁敏传感器,如图6所示,结构参数如表2所示,并对该磁敏传感器的性能进行了测试,可以满足实验需求。
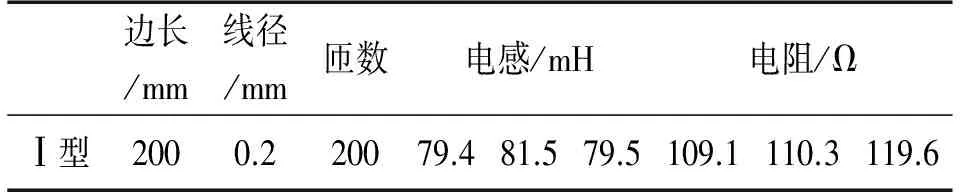
表2 性能参数
3 系统实验
为了增加系统的有效定位距离,满足特殊应用领域的需求(例如合成孔径雷达成像系统阵元位置校正),研制了大型三轴立方体磁芯天线。受课题研究进度和实验条件的限制,并考虑未来的应用中主要是针对发射天线进行大型化设计,因此进行系统实验验证时,发射天线采用大型三轴磁芯天线,接收天线仍采用小型球形磁芯天线置于实验平台接收天线支架上,实验布局如图7所示。
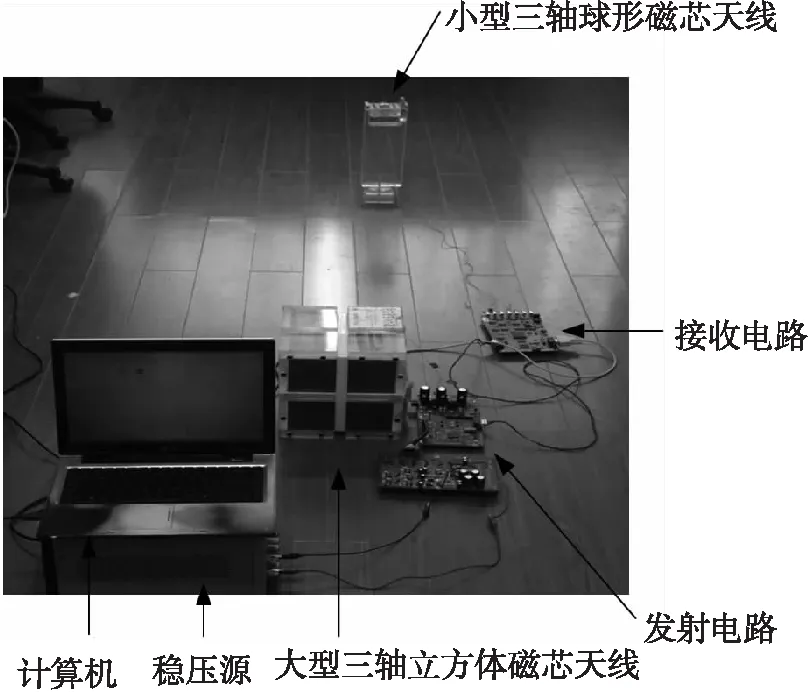
图7 大型三轴磁敏传感器实验布局

图8 系统总控软件
为了实时采集计算机异步通信串口传输的电磁跟踪系统接收矩阵,调用参数求解算法计算目标定位参数,设计了系统实验时的总控软件,软件界面如图8所示。通过总控软件,计算机实时采集接收电路按时序传输的三轴接收信号,组成接收矩阵,调用基于MATLAB语言编写的参数求解算法,计算定位目标的六自由度参数。
实验结果如表3所示,两次实验距离参数分别为:R1=2.56 m、R2=4.1 m。
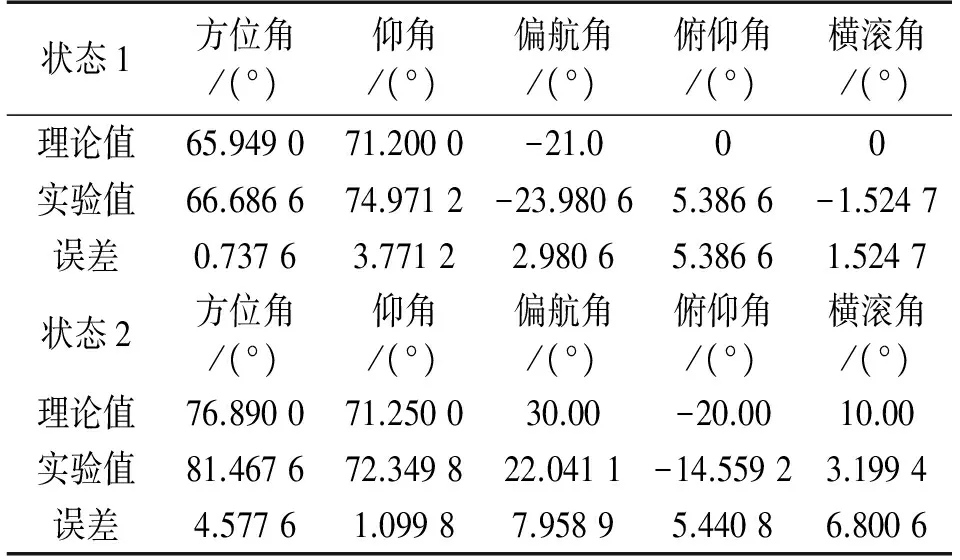
表3 大型三轴磁芯天线实验结果
上述实验结果个别参数的误差虽然相对偏大,但是考虑到其已经成功将定位距离提高到4 m左右,大大提高了系统的定位距离,初步实现了在远距离跟踪定位,验证了所设计的大型三轴正交磁敏传感器的可行性。实验误差主要有以下几方面的原因:一是受实验条件的限制,无法像近距离定位那样设计精度较高的实验平台,实验过程中的理论目标参数根据实际测量进行换算,客观上容易导致误差增大;二是发射天线附近的稳压电源对激励磁场会产生干扰,导致参数精度降低;三是大型三轴磁芯天线阻抗相对较大,研制的发射电路功率放大模块功率难以满足要求,导致发射信号偏低,噪声的干扰较大。
4 结论
本文在分析载流方环线圈空间磁场分布规律的基础上,提出了一种大型三轴正交磁敏传感器的设计方案,综合考虑磁芯材料、线圈匝数、导线类型、绕制方式等影响因素,设计加工了一套大型三轴磁敏传感器,进行了电磁跟踪系统远距离定位实验,验证了研制的大型磁敏传感器实用性和有效性。下一步可以从改善实验条件、改进功率放大电路、设计精度较高的大型实验平台等方面着手,以增加系统有效定位距离,提高定位精度,扩展其应用领域。
[1] Xie Jianfeng,Qin Cheng,Zhou Xin,et al. The Simulations and Experiments of the Electromagnetic Tracking System Based on Magnetic Dipole Model[J]. IEEE Transactions on Applied Superconductivity,2014,24(3).
[2] 殷勤,陈彬,熊润,等. 六自由度电磁跟踪系统远场模型的修正[J]. 传感技术学报,2010,23(2):220-224.
[3] 张求知,王永年,左明,等. 电磁式时分制头盔显示器瞄准线算法的改进[J]. 火力与指挥控制,2002,27(2):59-62.
[4] Alberto Vaccarella,Elena De Momi,Andinet Enquobahrie,et al. Unscented Kalman Filter Based Sensor Fusion for Robust Optical and Electromagnetic Tracking in Surgical Navigation[J]. IEEE Transactions on Instrumentation and Measurement,2013,62(7):2067-2081.
[5] 王森,陈晓冬,杜承阳,等. 磁干扰环境下基于多传感器的内窥镜姿态定位技术[J]. 传感技术学报,2013,26(8):1110-1115.
[6] 徐彤,王涌天,阎达远. 用于虚拟现实的六自由度电磁跟踪系统[J]. 北京理工大学学报,2000,20(5):544-549.
[7] 汪莹. 六自由度跟踪系统的DSP实现[D]. 南京:解放军理工大学工程兵工程学院,2007:9-10.
[8] 李军远,李盛风,陈宏钧,等. 基于磁偶极子模型的管道机器人定位技术研究[J]. 电波科学学报,2006,21(4):553-557.
[9] 周许申. 反雷达伪装效果成像检测系统研究[D]. 南京:解放军理工大学工程兵工程学院,2008.:92-98.
[10] 吴亚东,李斌. 利用三载流方环进行均匀磁场仿真[J]. 计算机仿真,2009,26(3):337-339.
[11] 黄时中,张玲,郭蕊. 轴截面为正方形的载流长直螺线管内的磁场[J]. 安徽师范大学学报(自然科学版),2014,37(6):540-542.
[12] 任来平,赵俊生,侯世喜. 磁偶极子磁场空间分布模式[J]. 海洋测绘,2002,22(2):18-21.
[13] 郭曜华,石立华,张杰,等. 瞬态三维磁场传感器的研制[C]//第十届全国抗辐射电子学与电磁脉冲学术年会,2008.
