基于柔性触觉传感器的坐姿压力监测系统设计*
2018-01-26江子烨
江子烨,裴 荣,吴 键
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引 言
不良坐姿状态下人体局部受力不平衡,易导致一些疾病的发生,对人体坐姿压力监测系统的研究显得尤为重要。目前,国内外对人体压力分布的测量比较少,主要集中在可穿戴式健康设备与足底压力的研究上[1]。美国Tekscan公司研制的压力分布测量系统由2片聚酯薄膜组成[2],该传感器厚度仅为0.1 mm,且柔性很好,成本低廉,但其迟滞影响严重,功耗高。Roho公司的Xsensor压力测量系统[3]为垫面状电容式压力传感器,该传感器柔软耐用,但厚度较厚,因此,表面压力值的测量准确性会受到影响。日本富士公司研制的压敏片能通过颜色反映接触区域的压力分布情况[4],该传感器较薄,使用简单,价格低廉,但每片只能使用一次。2014年,新加坡团队Darma设计了一种“不可穿戴”设备,智能坐垫,采用光纤传感器,可以测量使用者的坐姿、使用时间以及心率、呼吸等数据,但价格昂贵,不易于推广应用。
本文基于导电橡胶的压阻特性,选取了64个导电橡胶构成传感器阵列进行人体压力信号的采集,并设计了两级多路模拟开关对信号电路进行简化,通过无线发送模块传输数据,最终在上位机通过配色方案及插值形成人体压力的彩色图像,并应用分布式压缩感知理论降低系统功耗。采用的传感器成本低廉、柔软耐用,经实验验证其灵敏度高,多路模拟开关有效地降低了系统功耗。
1 系统硬件设计
采用模块化设计方法,主要包括柔性触觉传感器阵列的设计、信号采集与调理电路以及无线发送模块3部分。其中,单片机采样电路主要完成阵列信号的采集与调理,将数据 A/D 转换后通过无线发送模块传输至上位机。
1.1 传感器阵列设计
坐垫应舒适且符合人体工学,因此,传感器需要柔软耐用。通过比较常用的压力传感器的性能与成本,最终选取了以炭黑为填充材料的导电橡胶[5],性价比高,易于集成,柔韧性与弹性良好,且压阻特性明显,即导电橡胶会根据所受压力大小而发生形变,其电阻值也随之发生改变。
传感器阵列由64个敏感单元组成,每个敏感单元直径为10 mm,传感点根据人体工学的特点分布,即传感点在受力梯度大的区域密度大,受力梯度小的区域密度小,如图1所示。传感器阵列共分为3层:下面板为薄塑料板,板上敷有银浆电路形成传感器阵列的电路排列,并在敏感单元导电橡胶对应位置留有间隙;上面板为粘贴有导电橡胶的薄塑料板,其位置与下面板对应;中间层为网格状,其网孔和导电橡胶的位置一一对应,起到固定导电橡胶的作用。当受到外力时,上板层的导电橡胶接触到下板层电路导通[6]。
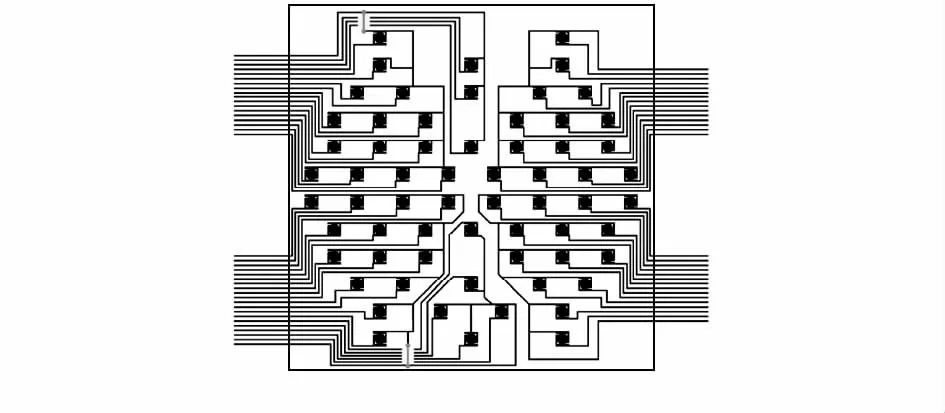
图1 传感器阵列的平面与分层结构
1.2 信号采集电路
信号采集电路如图2所示,图中R为阻值10 kΩ的分压电阻器,导电橡胶为可变电阻器R0~R63。输出端的电压变化分别反映了64个导电橡胶的阻值变化,由此即可通过64个导电橡胶的压力信息,得到人体压力的分布状态。
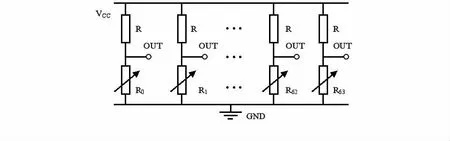
图2 传感器阵列的信号采集电路原理
选择了8通道的模拟开关CD4051[7]实现多路传感信号的高速切换,将CD4051分为2级对来自传感器的信号进行切换,第1级使用8个CD4051并行工作,同时处理64路信号,其片选端始终处于选通状态,第2级使用一个CD4051,最终只输出1路信号进入后续电路。
1.3 单片机控制电路设计
选择低功耗单片机MSP430G2553。图3为单片机对CD4051的控制电路。选择了单片机的6个I/O口,分别控制第一级8个CD4051的地址选择端以及第二级CD4051的地址选择端,即可通过单片机的编程实现对多路信号的选通。
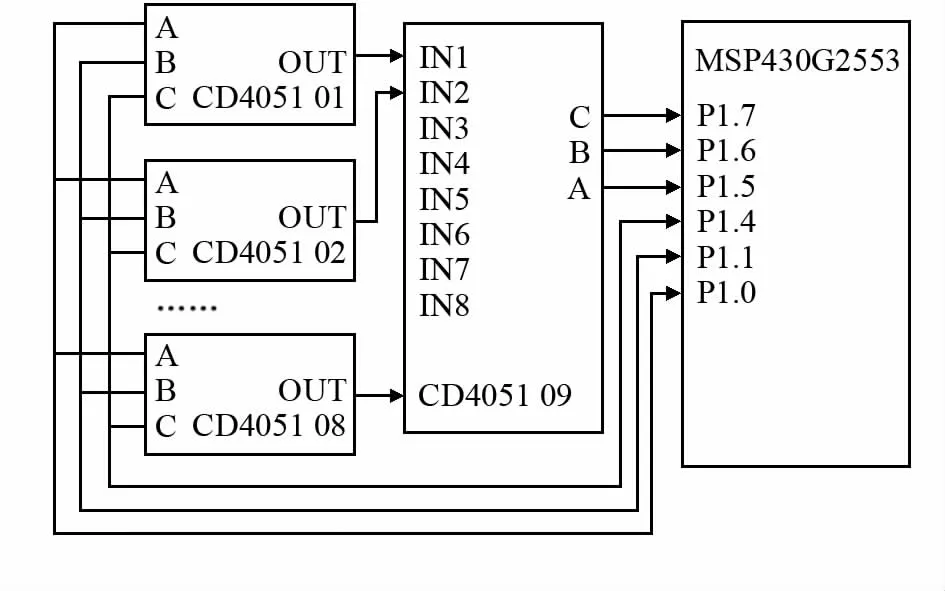
图3 单片机对多路模拟开关的控制电路
MSP430G2553自带有10位的ADC,单片机接收到数据之后通过复用AD功能对传输的数据进行A/D转换,选择单通道重复采样方式,并进行数据存储。为了增强通信的可靠性,减少通信的误码率,在通信过程中约定了上位机与下位机间握手方法:上位机给单片机发送握手信号0xFF,单片机接收到的数据若为0xFF,则发送数据包,并将0xFF作为第一个数据嵌入到数据包中;若不是0xFF,则循环等待。若上位机接收到的数据包中第一个数据不是0xFF,则抛弃该数据包;若是,则表示握手成功。
1.4 无线模块选取
选择了蓝牙模块HC—05作为无线发送模块进行数据传输,HC—05接口电平3.3 V,可以直接与单片机连接,空旷地有效通信距离20 m,使用简单,体积小,且有一定的防静电能力。HC—05是主从一体的蓝牙串口模块,将蓝牙配置于自动连接工作模式,当与其他设备配对成功后,可以忽视蓝牙内部的通信协议,直接将蓝牙做串口使用。选用蓝牙模块使得数据的传输更加方便,不受串口线距离的限制。
最终搭建的硬件系统框图如图4所示。上位机通过蓝牙模块与采集电路建立通信,并将信号传输至计算机,在MATLAB环境中读取、处理数据,最终形成清晰直观的人体坐姿压力分布彩色图像。
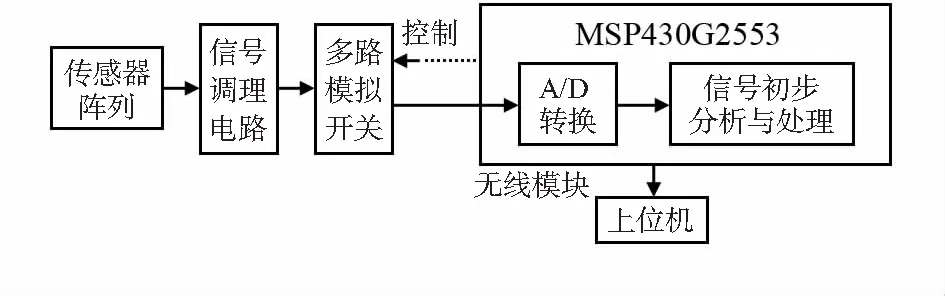
图4 系统硬件部分结构框图
2 系统的可视化实现
上位机采用MATLAB编写,利用MATLAB提供的设备控制工具箱(instrument control toolbox)与图形用户界面(graphical user interface,GUI)工具箱对串口通信与用户界面进行设计,实现对压力分布情况的图像显示、数据存储。软件设计流程如图5所示。

图5 软件设计流程
使用窗函数法设计优先冲激响应(finte impulse response,FIR)低通数字滤波器进行滤波,并使用dlmwrite函数将滤波处理后的原始电压数据存储在一个.txt文件中。数据经过处理之后,采用伪彩色的配色方案,即颜色的深浅代表该位置处所受压力数值的大小。另外对64 个传感节点采集到的压力数据进行双线性插值计算,从而使得显示的压力分布更加清晰直观。
系统中的传感器阵列属于分布式信源,采集的信号不仅具有信号内的相关性,还具有信号间的相关性,因此,符合分布式压缩感知的第二联合稀疏模型(joint sparse model—2,JSM—2)[8]。使用高斯随机矩阵作为观测矩阵对信号进行压缩,并针对JSM—2模型的特点,选择了同步正交匹配追踪(simultaneous orthogonal matching pursuit,SOMP)算法[9],该算法适合处理分布式多信源信号,可以同时重建多个信号。在MATLAB中对64路信号进行稀疏化,并重构得到压力图像,从而有效降低系统功耗。
3 实验与结果分析
系统通过3.3 V直流稳压电源进行供电,实验时随机挑选一人,监测其正常坐姿时的人体压力信号,通过蓝牙传输得到的压力值如表1所示,序号1对应的压力值为传感器阵列中第一行第一个传感节点采集到的数据,序号2对应传感器阵列中第一行第二个传感节点采集到的数据,依次类推。最终形成的压力分布图像如图6(a)所示。表2为该实验人员坐姿右倾时的部分压力信号值,通过分析可以得出右倾时右侧的传感器受力变大,电阻值减小导致输出电压值减小,最终形成的压力分布图像如图6(b)所示,图像清晰易于观察,可以对使用者起到很好的提醒作用。

图6 人体坐姿压力分布图像

表1 正常坐姿下人体压力数值
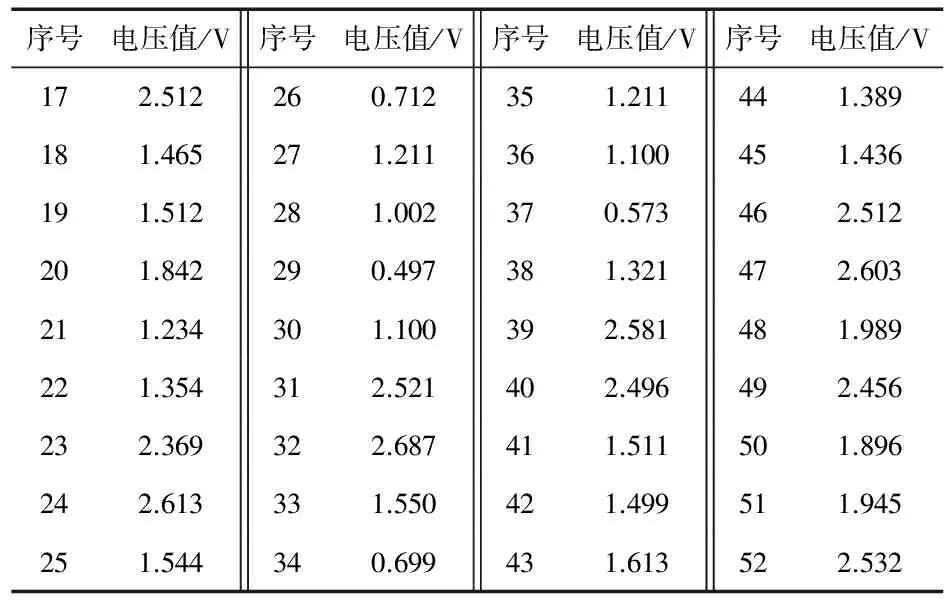
表2 坐姿右倾时部分人体压力数值
在MATLAB中应用分布式压缩感知理论,观测矩阵采用高斯随机矩阵对信号进行压缩,并针对JSM—2模型的特点选择同步正交匹配追踪算法,选取30个测量值后,最终形成的压力分布图像如图7所示,图像轮廓一定程度上变模糊,但不影响视觉,证明采用此方法可以有效降低功耗。

图7 经过分布式压缩感知后形成的压力分布图像
4 结束语
系统采用64个的导电橡胶设计一种传感器阵列,通过多路模拟开关与蓝牙模块进行数据采集与传输,并在MATLAB
环境下实现了对人体坐姿压力信号的采集与处理,通过分布式压缩感知减少采样数据,最终形成彩色图像直观地显示压力的分布情况。实验验证该系统具有良好的稳定性和分辨率,为搭建人体坐姿压力分布测量系统提供了便捷低廉的设计方案。
[1] Wettenschwiler P D,Stämpfli R,Lorenzetti S,et al.How reliable are pressure measurements with Tekscan sensors on the body surface of human subjects wearing load carriage systems[J] International Journal of Industrial Ergonomics,2015,49:60-67.
[2] 庄燕子,蔡 萍,周志锋,等.人体压力分布测量及其传感技术[J].传感技术学报,2005,18(2):313-317.
[3] Bachus K N,Demarco A L,Judd K T,et al.Measuring contact area,force,and pressure for bioengineering applications:Using Fuji Film and TekScan systems[J].Medical Engineering & Phy-sics,2006,28(5):483-488.
[4] 田合雷,刘 平,郭小辉,等.基于导电橡胶的柔性压力/温度复合感知系统[J].传感器与微系统,2015,34(10):100-103.
[5] 杨丽丽.坐姿压力分布测量系统的设计[D].重庆:重庆大学,2008.
[6] 杨丽丽,皮喜田,彭承琳,等.多点传感阵列的体压分布测量系统设计[J].传感器与微系统,2008,27(8):97-99.
[7] Baron D, Duarte M F, Wakin M B. Distributed compressive sensing[C]∥IEEE International Conference on Acoustics Speech & Signal Processing,2009:2886-2889.
[8] 雷 蕊,沈 为,张之江,等.基于光场的分布式压缩感知[J].电子测量技术,2014,37(3):20-23.
