航空腐蚀环境多参量集成监测技术研究*
2018-01-26王文龙刘荣梅季宏丽郭晓华龚晓静朱金阳
王文龙,曾 捷,刘荣梅,季宏丽,郭晓华,龚晓静,朱金阳
(1.南京航空航天大学 机械结构力学及控制国家重点实验室,江苏 南京 210016;2.中航工业 金城南京机电液压工程研究中心 航空机电系统综合航空科技重点实验室,江苏 南京 211106;3.法国图卢兹大学 法国国家科学研究中心 Clément Ader航空结构实验室,UMR CNRS 5312;4.中航工业综合技术研究所,北京 100028)
0 引 言
近年来,随着各种型号航空装备的快速发展,装备服役环境日益严酷,不仅对环境适应性要求持续提高[1,2],而且对腐蚀环境考核试验真实性与合理性的要求也越来越高。海洋环境航空装备主要面临高温、高湿、高盐等特点的海洋性大气腐蚀。大气腐蚀问题严重影响着航空装备的出勤率及使用寿命[3],腐蚀导致故障问题频发和相关维护费用不断攀升。因此,开展针对海洋大气微液膜腐蚀环境参量的监测技术研究,对于探索腐蚀损伤机理、提升我国航空装备腐蚀防护水平具有重要意义[4]。
美国Luna Innovations公司开发了用于腐蚀环境监测的无线智能传感节点[5],可以实现针对温湿度、湿润时间、累积腐蚀、线性极化电阻值等多种参量的实时监测,并在Bell UH—1N型双引擎军用直升机电子舱内进行了测试[6,7]。台湾国立云林科技大学Chou Jung-Chuan等人利用离子敏感膜技术研制了氯离子传感器[8,9]。目前,国内相关研究机构也开始关注如何实现针对腐蚀环境多种状态参量的集成监测方法,但仅限于对腐蚀环境参量的间接测量,直接测量手段相对匮乏。
本文提出了基于单片机MSP430的大气腐蚀环境多参量在线集成监测技术,实现了对温度、湿度、湿润时间及氯离子浓度等影响航空装备腐蚀状态的环境特征参量的实时监测。
1 测量原理
航空装备所处环境的温度、湿度、湿润时间和氯离子浓度等参量对于表征和评估结构腐蚀速率和腐蚀状态均具有重要意义。
1.1 温湿度传感器
为实现对环境温度与湿度特征的双参量监测,选用瑞士Sensirion公司研制的温湿度传感器SHT30,作为一种线性化、具有温度补偿、数字输出的半导体型传感器,SHT30精度为±2 %RH和±0.3 ℃,温度和湿度测量范围分别为-40~125 ℃和0 %~100 %RH。传感器可直接通过内部集成电路(inter-integrated circuit,I2C)总线接口结构与单片机通信,封装尺寸为2.5 mm×2.5 mm×0.9 mm,能够满足测试系统低功耗、微型化要求。
1.2 湿润时间传感器
湿润时间用于表征设备表面湿润状态的持续时间采用交叉指形电极测量湿润时间。该传感器基于交叉指型电极电阻值随表面附着液膜属性不同而变化,干燥时电极间互不接触,电阻值为无穷大;湿润时电极间导通,电阻值逐渐减小。
交叉指形电极采用陶瓷基板镀金工艺,具有机械应力强、形状稳定、高强度、高绝缘性、结合力强、防腐蚀等特点,使用温度范围为-55~850 ℃,循环次数达5万次。
1.3 氯离子浓度传感器
基于电化学原理,根据Nernst方程测量液膜中氯离子浓度。氯离子浓度传感器由工作电极和参比电极两大部分组成。传感器外壳由聚四氟乙烯制成,具有抗腐蚀特性,如图1所示。
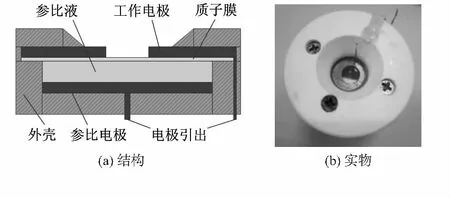
图1 微液膜氯离子浓度传感器
采用电化学沉积法,制得氯化银充当工作电极和参比电极。参比电极端内充参比液,用于提供较为稳定的参考电势,工作电极提供与氯离子活度相关的指示电势,两者电势差表征了微液膜中氯离子浓度。Nernst电势方程为[10]
(1)
(2)
ΔE=Ew-Er
(3)
由式(1)~式(3)可得
(4)
式中Ew为工作电极电势;Er为参比电极电势;ΔE为氯离子浓度传感器输出电势;E0为标准电极电势;R为气体常数,通常取8.314 41 J/(mol·K);T为温度;n为电极反应中电子转移数;F为法拉第常数96 487 C/mol;γ1,γ2分别为所测微液膜中和参比液中氯离子浓度。由式(4)可知,氯离子浓度传感器输出电势ΔE与所测微液膜中氯离子浓度γ1的对数呈对应关系,通过分析传感器输出电势变化即可反推出氯离子浓度信息。
2 系统硬件设计
2.1 监测系统总体框架
航空腐蚀环境监测系统实现对相关腐蚀环境参数的测量,并将采集的传感器信号进行数据处理与存储及输出显示[11,12],腐蚀环境监测系统总体框图,如图2所示。

图2 测试系统框图
将用于监测不同参量的传感器裸露于测试腐蚀环境,当环境参量发生变化时,温湿度传感器感知温度和湿度的变化并通过I2C接口将温度和湿度信息发送至主控芯片;当空气中湿度达到某一阈值且产生附着于湿润时间传感器和氯离子浓度传感器敏感单元的凝露时,湿润时间传感器电阻值和氯离子浓度传感器输出电势均会随之发生变化,再通过信号调理电路转换为电压信号供主控芯片采集。
2.2 测量电路设计
温度和湿度由集成化传感器采集,传感器本身已对信号进行线性化处理且为I2C式数字串行接口输出。
湿润时间传感器为电阻型感知器件,对应的叉指电极电阻值变化范围约为几兆欧姆至无穷大。为更好反映叉指电极电阻值变化,采用电阻分压电路及线性放大电路将叉指电极电阻值变化转换为电压输出。分压电路激励源可由稳压芯片进行稳压,分压电阻值的选用也应为兆欧(MΩ)级且精度高。
氯离子浓度传感器属于电压型感知器件,输出信号变化范围为毫伏(mV)级,需对该毫伏级信号进行线性跟踪放大输出。
2.3 主控电路设计
由于温湿度传感器为数字式总线输出,湿润时间和氯离子浓度传感器为模拟输出传感器,因此,主控芯片需要具有数字输入/输出串行接口及模/数转换接口。同时,为满足实际工况长时间多参量在线监测要求,系统选用TI公司低功耗MSP430F5529作为主控芯片。该芯片包含用于优化功耗的创新电源管理模块,具有多种可选工作模式,休眠模式唤醒仅需3.5 μs,具有超低功耗特性。片内外设资源丰富并可根据使用情况进行关闭以降低功耗,具有12位A/D转换器,丰富的串行接口如I2C,通用异步收发传输器(universal asynchronous receiver/transmitter,UART),串行外设接口(serial peripheral interface,SPI),CPU速度高达25MHz。
3 软件功能实现
主控芯片上电进行软件初始化后,芯片可进入休眠或半休眠模式。当需要执行采集任务时相关中断使主控芯片退出休眠模式并进入中断服务程序。
中断服务程序中执行读写SHT30和时钟操作,启动A/D采集湿润时间及氯离子浓度传感器信号,最终将采集数据保存并发送至软件监视界面。
当任务完成时主控芯片再次进入休眠模式以等待下次任务唤醒,如此循环。该工作模式能够有效降低腐蚀系统的整体功耗,非常适合长时间电池供电模式,极大地方便了日常监测与维护。
4 实验结果与讨论
4.1 湿润时间测试
采用移液枪量取微量氯化钠(NaCl)溶液滴加于镜头纸,模拟实际环境可能形成的微液膜。叉指电极表面附着液膜厚度在1 μm~1 mm可视为湿润状态,取20 μL氯化钠溶液形成约100 μm液膜厚度模拟叉指电极表面湿润状态。每次测量持续300 s,在50 s时滴加液体并在200 s时擦除,测得传感器响应曲线如图3所示。

图3 0.1 mol/L NaCl溶液下叉指电极响应曲线
分别设计100 μm和150 μm指间距两种规格叉指电极。实验表明:叉指电极响应迅速,对于同一种浓度溶液,指间距越小则叉指电极电阻值越小,即对应的响应电压越高,缩小指间距有助于提高传感器灵敏度,因此,模拟实验中选用了100 μm指间距的叉指电极作为湿润时间传感器。根据实际监测指标要求,可自行设定一个响应电压阈值,AD采样结果高于此阈值所持续的时间即为湿润时间。
4.2 氯离子浓度传感器测试
为更接近实际环境,测试溶液选用按照步长0.2 mol/L依次从0.1 mol/L逐渐增大至1 mol/L的NaCl溶液进行测试,每次采用移液枪量取1 mL溶液置于传感器收集窗口。氯离子浓度传感器响应曲线,如图4所示。

图4 氯离子浓度传感器第一次测试响应曲线
对于每一种浓度的氯化钠溶液,氯离子浓度传感器均会产生一个上升的阶跃响应并随着时间推移而趋于稳定。当溶液浓度由低到高变化时,传感器响应电势依次减小并呈规律性变化。通过多次重复性测量试验,共获得4组类似响应曲线。
图4显示了氯离子浓度传感器响应曲线在600 s时趋于稳定,选取此时电压作为判别氯离子浓度依据值。根据4组试验数据绘制氯离子浓度对数与响应电压曲线,如图5所示。实测曲线与理论拟合曲线趋势基本一致,且响应曲线重复性较好,对应的线性度分别为-0.985 8,-0.966 7,-0.985 8,-0.978 2。由此,可推算出溶液中氯离子浓度。
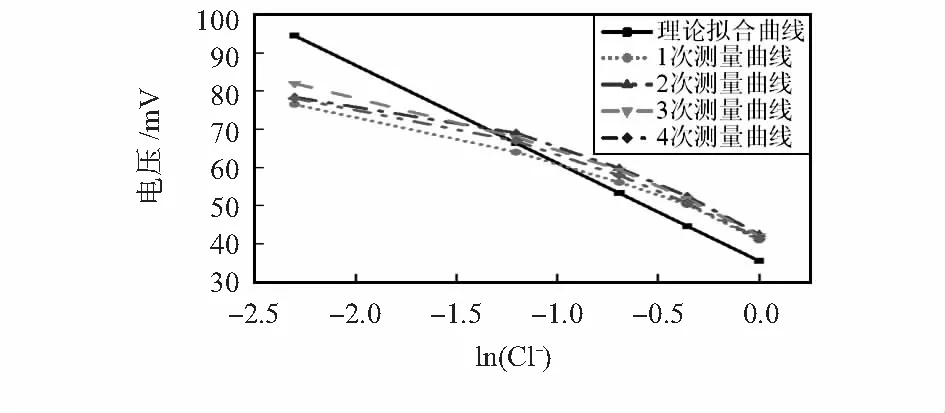
图5 氯离子浓度对数与响应电压关系曲线
5 结束语
针对航空装备腐蚀环境多参量监测需求,研究了基于MSP430单片机的航空腐蚀环境多参量集成监测技术,为探索腐蚀损伤机理、提升我国航空装备腐蚀防护设计与维护水平提供了理论和实践依据。
[1] 张令波,李 明,傅 耘.舰载机环境试验方法发展探讨[J].装备环境工程,2015(6):100-103.
[2] 骆 晨,李 明,孙志华,等.海洋大气环境中飞机的环境损伤和环境适应性[J].航空材料学报,2016(3):101-107.
[3] 李东帆.飞机结构的腐蚀与防护[J].装备环境工程,2016(1):57-61.
[4] 杨长胜,蓝启城.海军航空装备腐蚀防护与控制管理架构设想[J].装备环境工程,2014(1):105-110.
[5] Demo J,Steiner A,Friedersdorf F,et al.Development of a wireless miniaturized smart sensor network for aircraft corrosion monitoring[C]∥IEEE Aerospace Conference,Big Sky,MT,2010:1-9.
[6] Kathy Riggs Larsen.Sensors can predict corrosive conditions in military aircraft[J].Material Performance,2015,54(1):34-36.
[7] Demo J,Friedersdorf F,Andrews C,et al.Wireless corrosion monitoring for evaluation of aircraft structural health[C]∥IEEE Aerospace Conference,Big Sky,MT,2012:1-10.
[8] Chou J C,Su M W,Chen C C,et al.Cl-and H+sensing devices for water quality monitoring system[C]∥2012 IEEE International Symposium on Circuits and Systems,Seoul,2012:2043-2046.
[9] Tseng S C.Research of non-ideal effect and dynamic measurement of the flexible-arrayed chlorine ion sensor[J].IEEE Sensors Journal,2016,16(12):4683-4690.
[10] 赵 勇,姜 勤.能斯特方程的应用分析及离子计的研制[J].中国科技信息,2013(21):117-119.
[11] 陈真诚,刘善剑,朱健铭,等.基于MSP430F149的NPRQ检测系统[J].传感器与微系统,2016,35(3):124-126,129.
[12] 刘承桥,张耀南,冯克庭,等.基于MSP430F149的冰川参数采集系统[J].传感器与微系统,2015,34(5):59-62,65.
