跳跃滚动复合轮式移动机构
2018-01-23李铭阳连若绮胡頔
李铭阳+连若绮+胡頔
研究背景
现代科技的发展使机器人逐渐被應用到社会各个领域,有些环境和场合对于机器人的移动和操作能力有很高的要求。特别是近年来各种自然灾难和恐怖活动后的废墟,环境复杂多样,地面软硬相间、凸凹不平、沟壑众多,这就要求机器人的移动机构具有高环境适应性、强移动性,特别是应该具有很强的越障能力。为解决此问题,我们设计了一种既可以跳跃越障,又可以自由移动的运动机构——跳跃滚动复合轮式移动机构。
该移动机构将青蛙跳跃的仿生原理和构型设计的方法相结合,实现了具有跳跃功能的复合轮设计。该移动机构的设计与完成,使弹跳与轮式运动机构更加紧凑、轻便。同时在功能上,运动与跳跃更加灵活,具有很好的应用前景。
研究过程
跳跃移动机构的复合轮设计
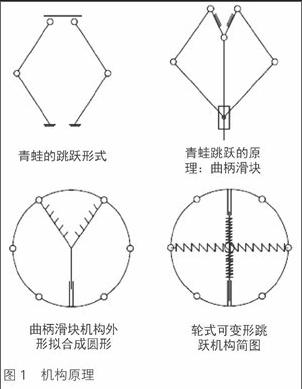
为实现结构轻便紧凑的设计目标,我们在设计过程中将轮式结构与弹跳装置结合。其设计理念来源于青蛙的双腿弹跳原理,见图1。当青蛙双腿弹跳时,机构运动可以看作对称的曲柄滑块机构的运动,同时转化各个连杆零件的形状,使其整体上呈圆形就组成了轮式机构。在轮式机构中应用弹簧机构可以驱动连杆机构运动,实现青蛙的双腿弹跳功能——这就是该机构的原理。
当常规状态下拉开弹簧装置,机构呈现圆形的轮式结构。当弹簧机构被释放后机构从圆形状态变为橢圆状态,可以产生对地面的反作用力,实现弹跳功能。轮子由连杆机构构成,在工作状态下机构外形呈圆形。在此状态下拉簧被拉伸展开,为弹跳过程积蓄能量。当触发装置启动后,拉簧的能量被迅速释放,驱动机构由圆构型变化为橢圆构型,使机构对地面产生瞬时的作用力,起到弹跳作用。机构的弹跳方向通过控制轮的接地点控制。
移动机构整体设计
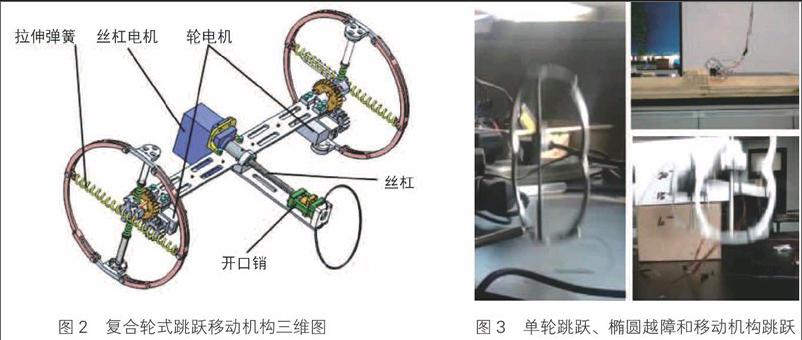
设计了复合轮之后,复合轮式移动机构的设计也采用了简单轻便的设计思想。采用了简单的两轮的差动结构,即在车体的左右两侧各配置一个复合轮,然后采用一个平衡车体运动的尾部支撑结构。这样的设计使整个机构简单、轻便、可靠。弹簧的拉伸与复位靠绳索机构驱动,绳索机构的运动通过电机驱动丝杠实现。丝杠机构配置在尾部以实现运动平衡与重量平衡。整体机构如图2所示。
弹簧机构的触发机构通过特殊设计的弹性机构实现。弹簧的拉紧和触发装置主要由开口销、丝杠、丝杠螺母、开口销顶锥组成。首先,丝杠螺母在丝杠的反驱动状态下压入开口销,然后开口销与丝杠螺母一起运动拉紧弹簧。当丝杠螺母带动开口销运动到顶端顶到开口销顶锥后,开口销被打开,释放弹簧实现弹跳功能。
跳跃角度可通过轮子的角度调整。通过调整两轮的不同弹射角度,可以实现斜上方的跳跃,从而实现三维跳跃过程。所谓三维跳跃是机构不仅能够实现向前和向后的跳跃,而且可以实现侧向跳跃。
样机实验
完成了原理分析与构型设计后,为节约成本,选择采用铝合金材料制作了跳跃机构样机,样机参数为:直流伺服电机10W×l,5W×2;转动速度80r/min;整体尺寸256mm×190mm×124mm;重量300g;最大速度0.5m/s。
单轮弹跳实验(图3左)表明,轮子在弹簧力的作用下可以轻松跳起。轮式行走实验表明,机构在轮子的转动驱动下可以自由移动。椭圆式轮型运动越障实验(图3右上)表明,当轮子的弹簧被放松后,机构成椭圆状态,此时机构能够跨越更大的障碍物。移动机构的跳跃实验表明(图3右下),机构在弹簧力的作用下能够跳起20cm。由于机构目前只能由操作者遥控控制,在弹射角度的控制上有一定难度,打算以后采用码盘及自主控制解决该问题。当弹跳角度分别为45°、60°、90°时,对应跳跃高度为159.1mm、194.8mm和225mm;跳跃距离为159.1mm、112.5mm和0mm。
应用前景及设想
前景:该跳跃移动机构具有质量轻、结构紧凑、运动稳定、弹跳距离既髙又远、弹跳方向多样可控的特点。能够应用到各种复杂环境中完成巡视与搜索任务,应用前景广阔。
改进设想:该机构的进一步改进,主要是结构精细化设计,选择更加轻质的材料。控制上采用自动检测跳跃角度的方法实现自动跳跃。逐渐实现在运动中起跳。
创新点
原理上,应用青蛙跳跃的仿生原理和构型设计的方法相结合实现了具有跳跃功能的复合轮设计。
机构上,采用轮式机构与四连杆机构和弹簧机构相结合,实现了轮式运动的同时可以完成跳跃功能。
应用上,所设计的移动跳跃机构简单可靠、轻便紧凑,适用于在较复杂环境中移动。
该项目获得第31届全国青少年科技创新大赛创新成果竞赛项目中学组工程学一等奖。
专家评语
该项目构思新颖,设计巧妙,结构紧凑,易于操作,采用了连杆机构和弹簧相结合的复合机构,克服了同类项目难以适应地面环境的缺点,不仅具有一定的科学价值,还有很好的使用性能。endprint
