基于人工势场算法的智能车辆路径规划仿真∗
2018-01-15安林芳成艾国
安林芳,陈 涛,成艾国,方 威
(湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082)
前言
近年来,自动驾驶逐步走进人们的生活,其中智能车辆路径规划和障碍物规避一直是研究的重点。智能车辆的局部路径规划是指基于传感器等设备感知行驶遇到的空间障碍物,在满足动力学、运动学约束和稳定性、舒适性等评价指标的条件下预先或实时地为智能车辆规划出从出发点到目标终点的最优路径[1]。
目前常用的方法包括遗传算法[2]、神经网络方法和人工势场算法等。其中,人工势场算法无须对全局进行搜索,规划时间短,执行效率高,非常适合实时性和安全性要求较高的路径规划,用该算法规划的路径最平滑和安全[3]。文献[4]中提出利用高斯组合隶属函数建立引力目标点函数,在引力点函数中考虑障碍物和车辆约束的方法,消除了抖动问题,实现了无人驾驶车辆局部路径最优。文献[5]中根据车辆行驶避障的实际情况,通过优化安全避障中人工势场圆形虚拟力场作用域模型,生成动态障碍物与虚拟引力势场,解决了虚拟势场作用域固定、避障角度过大的问题,实现了车辆小角度、大半径避障。文献[6]中提出随机变动目标点的方法,跳出势场局部最小点,并采用连锁网络方法,解决了在障碍物密集区域轨迹振荡的问题。
将人工势场算法运用到智能车辆局部路径规划中,不仅要考虑到算法中障碍点和目标点的建模,还要考虑到智能车辆本身的运动复杂性。智能车辆行驶一方面受到道路边界的约束,另一方面车辆本身受到运动学和动力学的约束。
为保证车辆行驶平稳舒适并能准确躲避障碍点,提出了一种新的障碍点构建方式。根据车辆行驶中道路边界障碍物、实际障碍物和车辆间最小安全距离,按照避障换道方式构建障碍点模型,最后考虑车辆动力学和运动学约束,通过对车辆转向角进行控制实现车辆预期运动的执行。
1 总体框架
为保证智能车辆能规划最优路径并实现准确平稳的追踪,按照环境感知、行为决策、路径规划和车辆运动执行4部分来对车辆进行控制,如图1所示。
环境感知部分由车载传感器对道路、障碍点和车辆行驶状态的相关信息进行采集和处理。行为决策部分根据
采集的信息按照驾驶行为决策进行障碍物分析判断,并对障碍点、目标点进行建模。路径规划部分根据已建立的障碍点、目标点模型和车辆行驶状态采用改进人工势场算法进行避障路径规划。运动执行部分根据上述命令,通过车辆转向机构和驱动/制动机构等实现车辆对所规划路径的实时稳定跟踪。
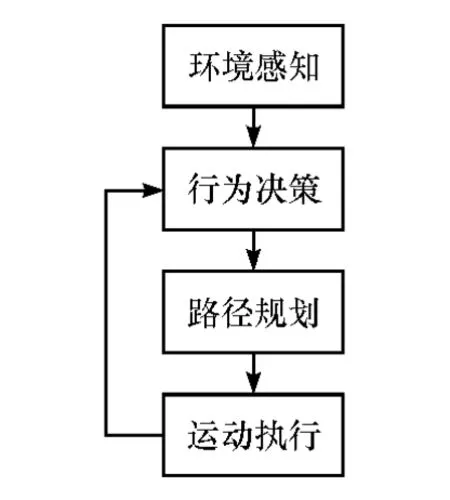
图1 智能车辆总体结构框架
2 改进的人工势场算法路径规划
2.1 传统人工势场算法原理
1986年,Khatib首次提出人工势场算法,并将其引入到路径规划领域[7]。传统人工势场算法的基本思想是将被控对象在空间中的运动虚拟成一个质点在虚拟力场中的受力运动,目标点会对被控对象产生吸引力,而由障碍物或威胁区域产生的障碍点会对被控对象产生排斥力。最终,被控对象在引力势场和斥力势场的共同作用下朝着目标点运动,如图2所示。

图2 人工势场算法模型
将被控对象简化为一质点,其运动空间为一个二维欧式空间,实际上即平面,被控对象在其中的坐标为 X=(x,y),目标点坐标为 Xg=(xg,yg),目标点对被控对象产生的引力势场为Uatt=f(X),该函数定义为与被控对象位置、目标点位置相关的二次函数,即

式中:k为引力势场系数;X-Xg为被控对象到目标点的距离ρg。

由此可得,被控对象所受引力为引力势场的负梯度,即

式中Vg是由被控对象指向目标点的单位向量。
当障碍点坐标位置为Xob=(xob,yob),被控对象受到该处的斥力势场函数为
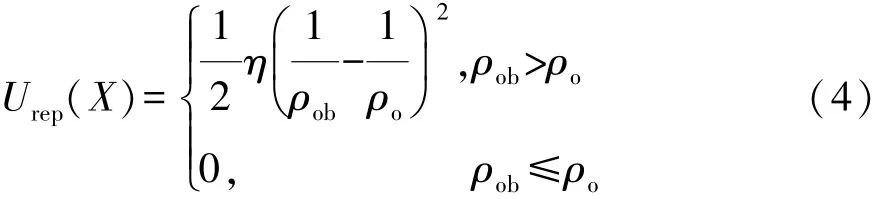
式中:η为斥力势场系数;ρo为斥力势场作用距离;ρob为被控对象到障碍点的距离。当被控对象在作用范围之外,即ρob大于ρo时,被控对象不受斥力作用。
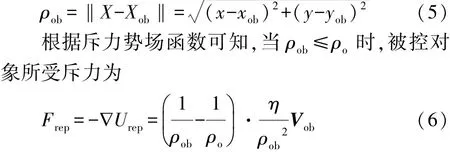
式中Vob是由被控对象指向障碍点的单位向量。因此,被控对象在其运动空间所受斥力为
综上所述,当被控对象在其运动空间受n个障碍点作用时,其所受合力为

传统人工势场算法存在的问题如下。
(1)目标不可达 当目标点附近存在障碍点时,被控对象在目标点附近所受到的斥力大于引力,可能会导致被控对象一直在目标点附近徘徊,无法到达目标点。
(2)局部极小值 当被控对象在某一点所受到的斥力和引力的大小相等且方向相反时,由于合力为零,被控对象无法确定下一步的前进方向,可能会出现停止或者徘徊的情况。
2.2 改进人工势场模型
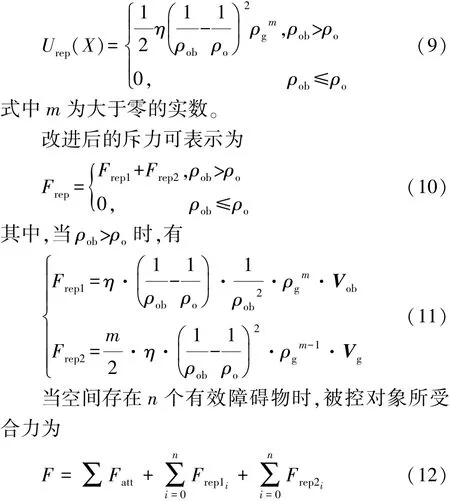
文献[8]中通过在斥力势场函数中加入目标点与被控对象之间的距离作为引入调节因子来解决目标不可达问题,实现了目标点附近存在障碍点时,被控对象在向目标点运动的同时所受斥力相应减小,改进后斥力势场为
2.3 基于人工势场算法的目标点和障碍点建模
提出一种新的障碍点构建方式,即根据车辆行驶中道路边界障碍物、实际障碍物和车辆间最小安全距离,按照避障换道方式构建障碍点模型,对称分布障碍点,使目标点始终位于障碍点对称轴线上,保证被控智能车辆能在合力作用下沿着规划的目标路径运动。车辆行驶过程中障碍点建模按照实际情况可划分为:行驶道路内不存在障碍物和行驶道路中存在实际障碍物两种情况。行驶道路内不存在障碍物时,选取当前行驶道路边界构建障碍点;行驶道路中存在实际障碍物时,根据实际障碍物信息和车辆行驶状态构建车辆行驶的障碍点。
2.3.1 道路内无障碍物
由智能车辆环境感知部分的传感器和雷达等装置对当前行驶道路进行实时扫描,得到道路边界信息。当智能车辆当前行驶道路中不存在有效障碍点时,设定障碍点由道路边界线构成,目标点由当前行驶道路中心线构成,如图3所示。
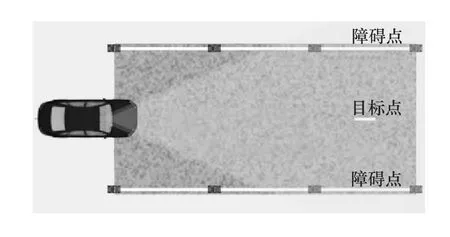
图3 道路边界障碍点模型
2.3.2 行驶道路存在实际障碍物
当智能车辆当前行驶道路内遇到实际障碍物时,按照驾驶行为习惯分析智能车辆避障的过程。可简单地理解为,智能车辆环境感知部分通过传感器得到障碍物的信息,由行为决策对障碍物情况进行判断处理,再基于人工势场算法进行障碍点建模。
假设智能车辆避障路径符合正弦函数特性。在相同条件下,与圆弧换道等避障路径相比,正弦换道具有轨迹曲率极大值最小、换道平滑、计算简单等优点[9]。如图4所示,结合车辆实际行驶情况,对车辆进行运动学分析。被控车辆在检测到障碍点后经决策判断在t0时刻开始进行换道动作;行驶至t0+t1时,达到与障碍点发生碰撞的临界点;行驶至t0+t3时,车辆完成避障变道,车体摆正到达局部目标点G。
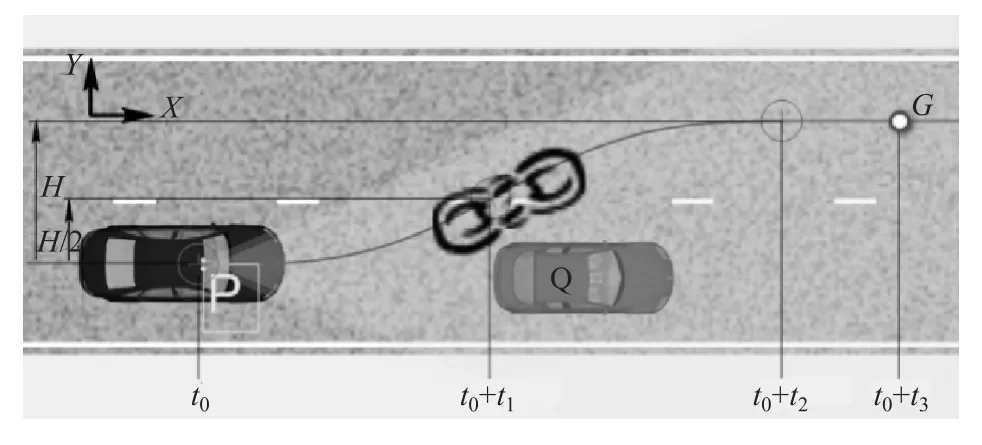
图4 车辆避障换道运动学模型
为保证t0到t0+t3时间内X轴方向不发生碰撞,车辆和障碍点之间应满足的最小安全距离为

式中:vP(0),vQ(0),aP和 aQ分别为被控车辆、障碍物的初始速度和加速度。
车辆避障路径符合正弦函数特性,故车辆避障换道过程中的侧向加速度ay满足
对侧向加速度做时间积分可得侧向速度vy,再对速度进行积分,可得避障变道过程中车辆的侧向位移y。
设等速偏移换道过程中,车辆沿X轴匀速运动,保证乘客的舒适性,速度为vx。
综上,为保证被控车辆准确按照换道轨迹行驶,将车辆避障换道轨迹平移最小安全距离得到障碍点轨迹为

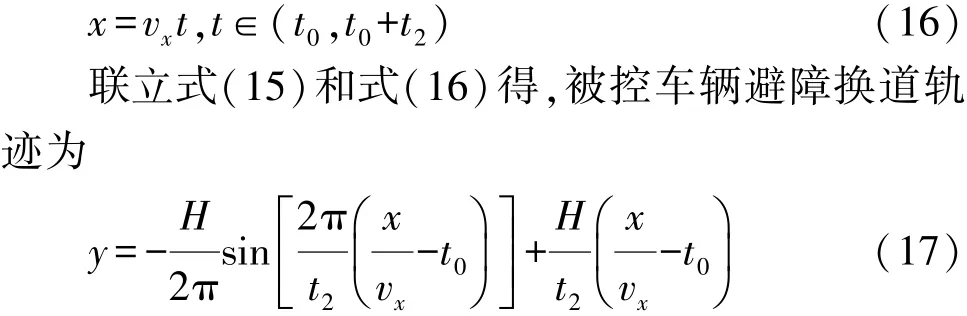
通过建立对称分布障碍点模型可使目标点始终处于对称轴线上,对称方向斥力分力相互抵消,保证斥力引力始终在一条直线上。解决了振荡和局部最小值问题,使智能车辆能够准确按照目标路径运动,如图5所示。通过对障碍物的变换建模,既解决了目标不可达问题,又保证了所规划的路径平滑,实现了被控车辆平稳顺畅换道。
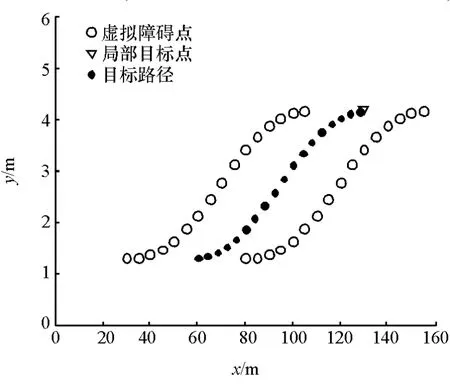
图5 路径规划实际障碍点模型
3 车辆动力学约束
将人工势场模型引入智能车辆路径规划中,目标点所产生的引力势场函数受到道路边界障碍物和实际障碍物的约束,同时还要考虑车辆本身运动学和动力学约束。
结合2自由度车辆模型,如图6所示,建立运动微分方程:
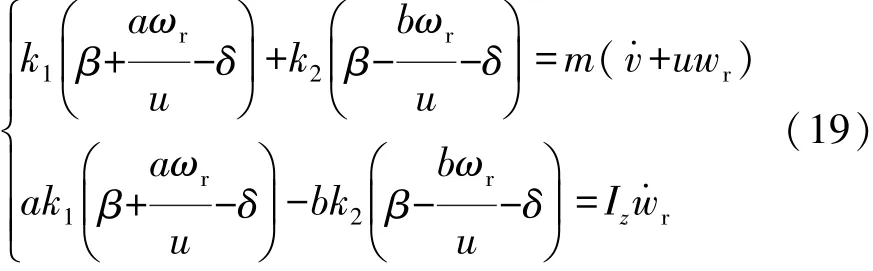
式中:k1和k2分别为前后轮的侧偏刚度;m为车辆总质量;Iz为车体转动惯量。
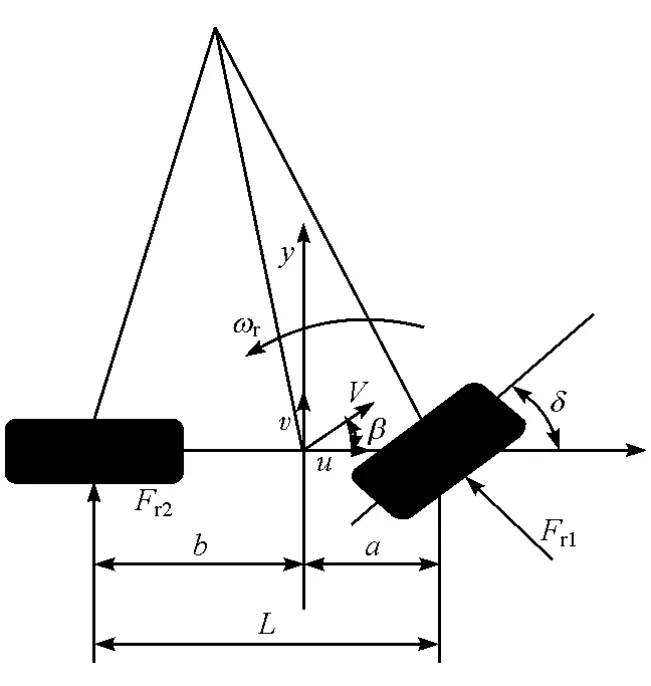
图6 车辆线性2自由度模型
在车辆行驶过程中,转向灵敏度是检验车辆行驶方向的准确性和稳定性的重要指标。一般采用横摆角速度与前轮转角的比值来表示车辆转向灵敏度[10],即

式中:v为车辆行驶速度;L为车辆轴距;K为稳定性系数。为了保证行驶的安全性,要求转向灵敏度与车速呈线性关系,即中性转向K=0。

基于车辆坐标系下的运动,可得车辆质心加速度沿Y轴分量即车辆侧向加速度为

车辆进行转向避障时满足稳态转向避障且车辆转向时质心侧偏角较小。速度恒定情况下可认为质心速度约等于车辆沿X轴的速度分量,因此可求得

通过控制转向盘的转角实现安全避障时,角度过大可能会造成车辆侧滑的危险,为保证汽车安全行驶,实际控制中的避障角度和行驶速度要满足一定动力学条件。在改变转向盘转角时要求车辆侧向加速度不大于0.4g,即车辆行驶安全角和行驶速度之间满足动力学条件[11]。可得前轮转角应满足

根据上述分析,智能车辆前轮转向角同时受到行驶速度和转弯半径的影响。因此,为保证平稳转向,前轮转角取值应满足:

4 仿真分析
为验证所构建的局部路径规划方法的可行性和有效性,利用Prescan软件搭建测试环境,并用Matlab/simulink软件进行基于人工势场和车辆避障换道模型改进的算法编程控制,对智能车辆行驶过程进行模拟仿真,验证路径规划的准确性。
借助Prescan平台搭建预瞄跟随模型。以Audi A8为被控智能车辆,选择单向车道宽度为3.5m的双车道为车辆行驶道路,同时为被控智能车辆添加传感器,并设定其动力学模型为Prescan自带的线性2自由度模型,随后将模型连接至Matlab/simulink进行仿真如。
对改进的人工势场算法进行Matlab编程仿真,算法控制流程如图7所示。
设定智能车辆在36,54和72km/h 3种速度下匀速行驶,检测遇到静止障碍物并开始避障换道,设定换道时间为8s,预瞄时间为1.5s[12],得到路径跟随仿真结果,如图8~图11所示。
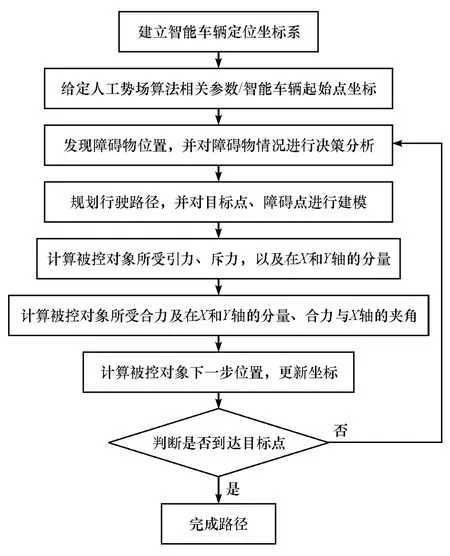
图7 改进人工势场算法流程
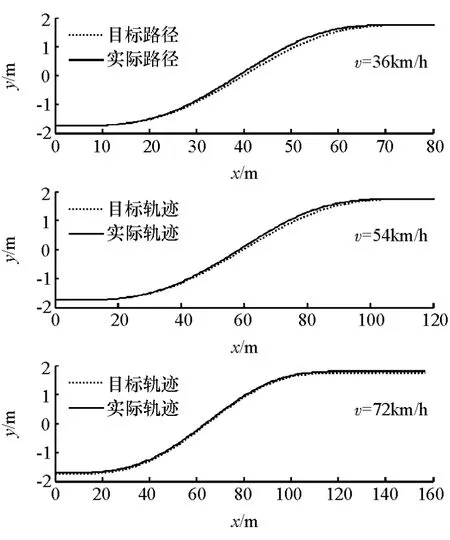
图8 不同速度下实际运动路径
由图8可知,通过改进人工势场算法对目标点和障碍点建模,得到的智能车辆实际运动路径与避障换道模型下构建的目标路径基本重合,算法能规划出满足要求的平滑路径。
由图9可知,仿真中智能车辆目标路径和实际运动路径的横向误差呈现出先增大再减小的趋势,且速度越大,横向误差越小。在智能车辆速度36km/h时,仿真中出现的最大横向误差为0.07m,满足误差要求,能实现较准确的实时跟踪。
由图10和图11仿真结果可知,被控智能车辆能按照所规划的目标路径实现平顺避障换道。换道过程中的前轮转角随着车辆行驶过程呈现先正向增大再减小至零,再反向增大,最后减小至零的趋势,且最大转向角与智能车辆行驶速度成反比。智能车辆Audi A8轴距L=2.94m,设定最小转弯半径为5m,得到前轮转角最大值为6.6°。当智能车辆速度为36km/h时,避障换道过程出现的最大前轮转角为 5.52°,满足要求。

图9 不同车速下智能车辆横向误差
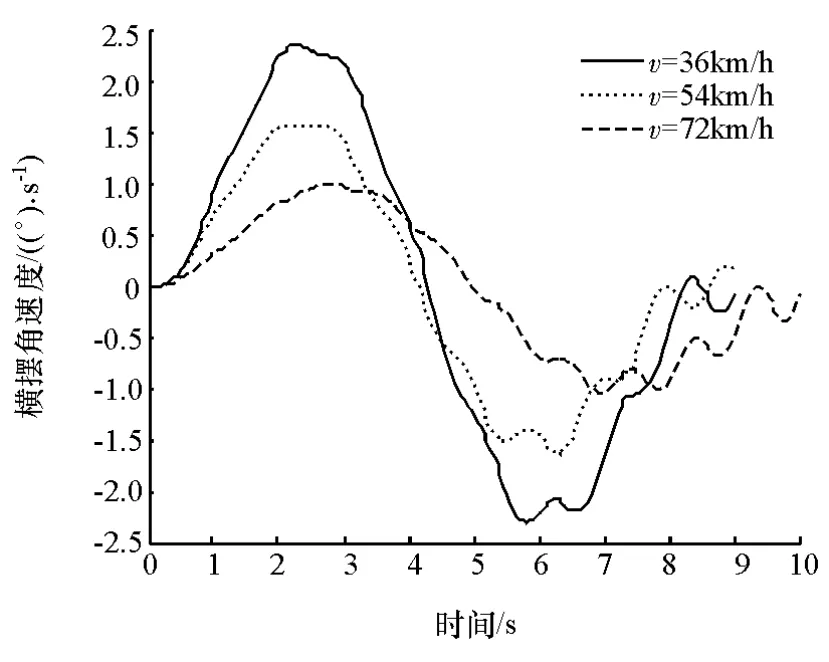
图10 不同车速下智能车辆横摆角速度

图11 不同车速下智能车辆前轮转角
5 结论
将人工势场算法运用到智能车辆局部路径规划中,结合车辆行驶实际情况,按照正弦避障路径以最小安全距离对称构建障碍点模型,保证局部目标点处于对称轴线上,以智能车辆运动学、动力学约束进行仿真。结果表明,算法能规划出平滑的目标路径,车辆行驶运动平稳安全。解决了目标不可达和局部最小值问题,同时考虑了智能车辆实际约束,解决了智能车辆局部路径规划问题。下一步研究将考虑不同路况下智能车辆的复杂约束,同时通过实车试验进行验证。
[1] 张殿富,刘福.基于人工势场法的路径规划方法研究及展望[J].计算机工程与科学,2013,35(6):88-95.
[2] 石铁峰.改进遗传算法在移动机器人路径规划中的应用[J].计算机仿真,2011,28(4):193-195,303.
[3] YAO Peng, WANG Honglun, SU Zikang.Cooperative path planning with applications to target tracking and obstacle avoidance for multi-UAVs[J].Aerospace Science and Technology,2016(4):2.
[4] 修彩靖,陈慧.基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J].汽车工程,2013,35(9):808-811.
[5] 谭宝成,崔佳超.改进人工势场法在无人车避障中的应用[J].西安工业大学学报,2014,34(12):1007-1011,1017.
[6] 霍凤财,任伟建,刘东辉.基于改进的人工势场法的路径规划方法研究[J].自动化技术与应用,2016,35(3):63-67.
[7] KHATIB O.Real time obstacle avoidance formanipulators and mobile robots[J].The International Journal of Robotics Research,2003,2(5):500-505.
[8] 杨一波,王朝立.基于改进的人工势场法的机器人避障控制及其MATLAB实现[J].上海理工大学学报,2013,35(5):496-500.
[9] 李玮.智能车辆自由换道模型研究[J].公路交通科技,2010,27(2):119-123.
[10] 崔佳超.无人驾驶智能车在动态环境中的避障方法[D].西安:西安工业大学,2015.
[11] 徐梁征,肖成永,张建武.汽车列车系统稳定性分析及控制系统仿真[J].计算机仿真,2003(12):107-110,40.
[12] 高振海,管欣,李谦,等.基于预瞄跟随理论的驾驶员跟随汽车目标速度的控制模型[J].吉林工业大学学报(工学版),2002(1):1-5.