一种惯性/卫星容错组合导航系统设计
2018-01-11臧中原许东欢仲科伟张晓澈
董 亮, 臧中原, 许东欢, 仲科伟, 张晓澈
(上海航天控制技术研究所,上海 201109)
一种惯性/卫星容错组合导航系统设计
董 亮, 臧中原, 许东欢, 仲科伟, 张晓澈
(上海航天控制技术研究所,上海 201109)
在高动态情况或城市峡谷中,GNSS卫星接收机容易丢星失锁,在信号干扰的情况下,GNSS卫星接收机会失效。针对上述情况,设计了一种惯性/卫星容错组合导航系统,详细介绍了惯性/卫星容错组合导航系统的设计方案,具体介绍了惯性/卫星组合导航系统可能出现的异常组合,针对不同的异常情况给出了相应的处理策略。该容错组合导航系统在GNSS卫星接收机异常的情况下可以提高组合导航系统的精度和可靠性。设计了仿真试验和跑车试验对该惯性/卫星容错组合导航系统进行验证,取得了较好的效果。
容错组合导航; SINS; GNSS; 丢星; 跑车试验
0 引言
组合导航系统就是把具有不同特点的导航系统组合在一起,取长补短,以提高导航系统的精度。由于惯性导航系统和卫星导航系统各有优缺点,GNSS卫星导航系统能够在全球提供实时的速度、位置和时间信息,且精度不随时间变化。SINS捷联惯性导航系统是一种完全自主的导航系统,它具有高数据率,且不易受到外界电磁干扰等特点。由于GNSS和SINS具有很强的互补性,对二者进行组合可以使系统具有更好的性能。
对于SINS/GNSS组合导航系统而言,将GNSS子系统输出速度、位置信息与SINS子系统输出信息进行信息融合,采用卡尔曼滤波估计出导航参数误差等对SINS子系统的误差进行修正。通过卫星辅助惯性方式实现的SINS/GNSS组合导航系统[1-2]相比单一的捷联惯性导航系统或者卫星导航系统,其导航性能得到很大的提高。但是SINS/GNSS组合导航系统依然面临很多问题,如抗干扰性、运行可靠性、故障自我诊断能力不足等,通常的惯性/卫星组合导航系统在卫星失锁后,只进行纯捷联惯性导航解算,对于精度比较低的MEMS惯性测量单元,导航误差快速累计,因此设计一种在丢星情况下可提高导航精度的容错组合导航系统[3-4]是必要的。
1 容错组合导航系统设计
1.1 IMU数据异常判断
本文设计了两级措施来判断IMU数据是否异常。
1) 根据惯性测量单元的角速率采样值以及比力的采样值是否超过阈值来判断SINS子系统的工作状态。设角速率阈值为ω(axis)max,比力阈值为f(axis)max,其中,下标axis为陀螺、加速度计xyz轴向标识,该阈值通常可根据惯性器件或者飞行器的动态极限设置,判断加速度计采样值faxis和陀螺采样值ωaxis是否满足
(1)
式中:ω(axis)max的值设为陀螺测量范围是200 (°)/h;f(axis)max的值设为加表测量范围是10g。
2) 根据采样多次陀螺输出的角速率和加速度计输出的比力,对其进行拟合,通过拟合曲线可以得到下一包数据的拟合值,比较实际得到的数据与拟合得到的值的大小,以角速度为例用四次曲线对其进行拟合,采用滑动窗口的方式,惯导采样一组数据,则将最先一组数据滑出,可以保证拟合的实时性,即
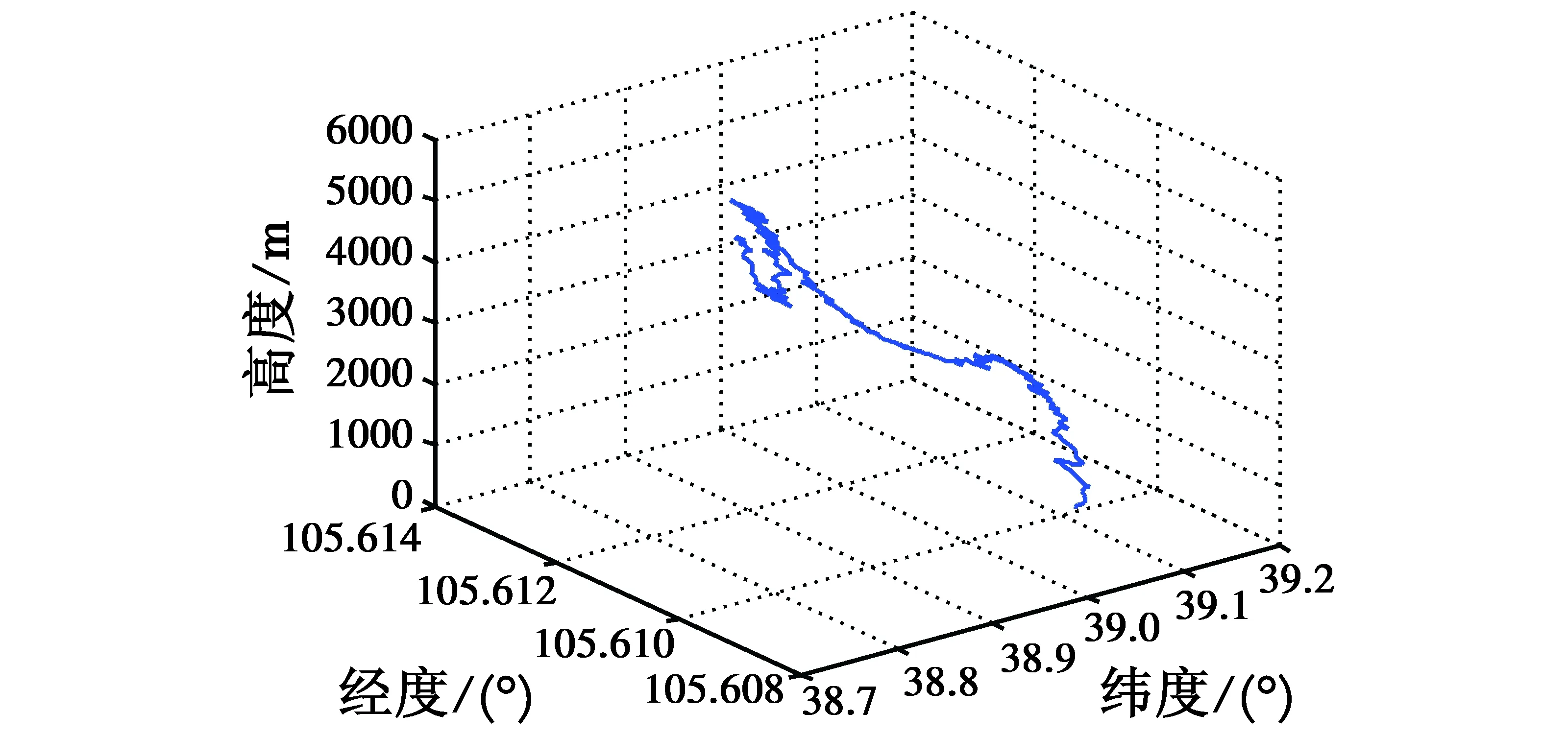
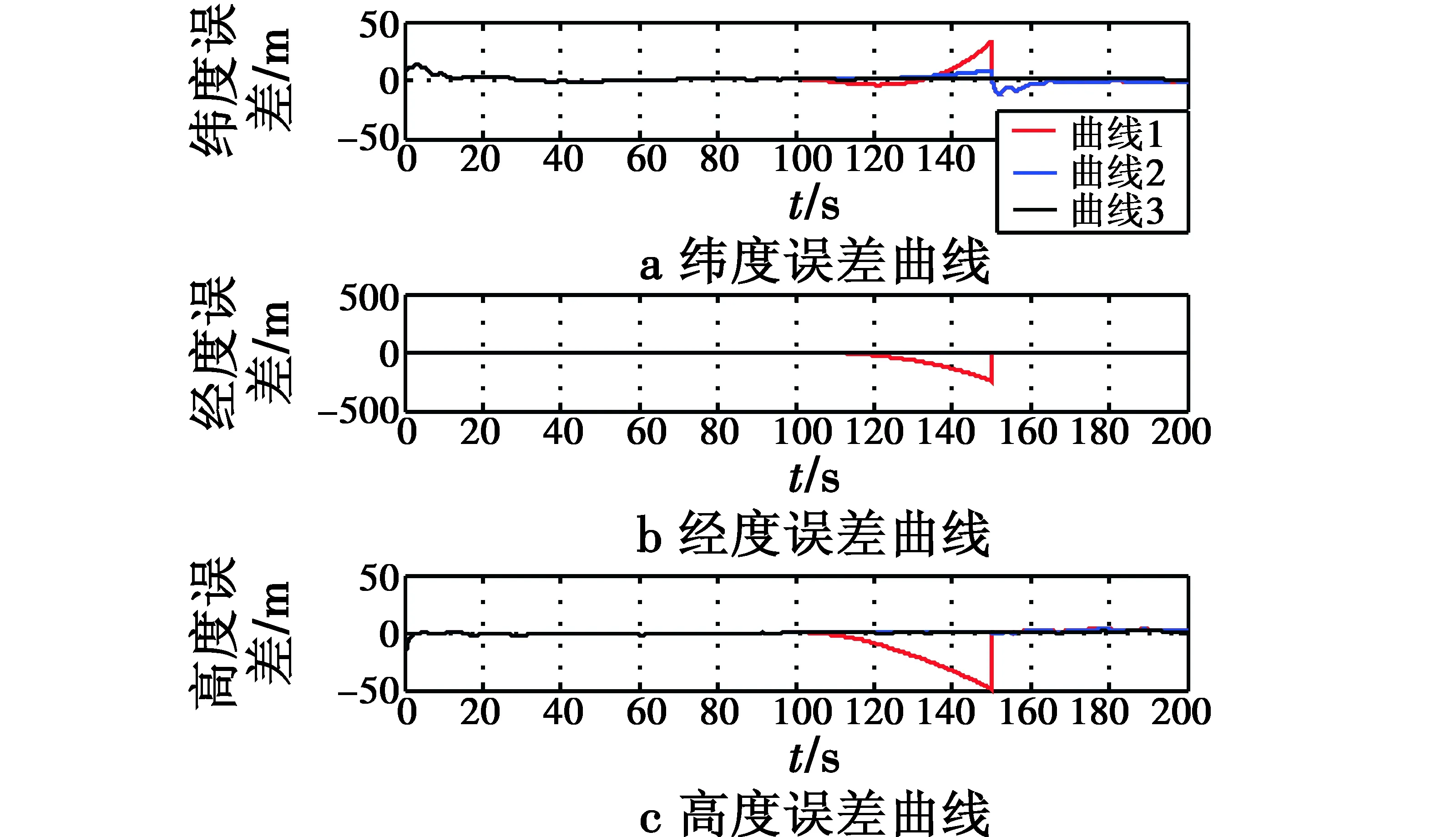
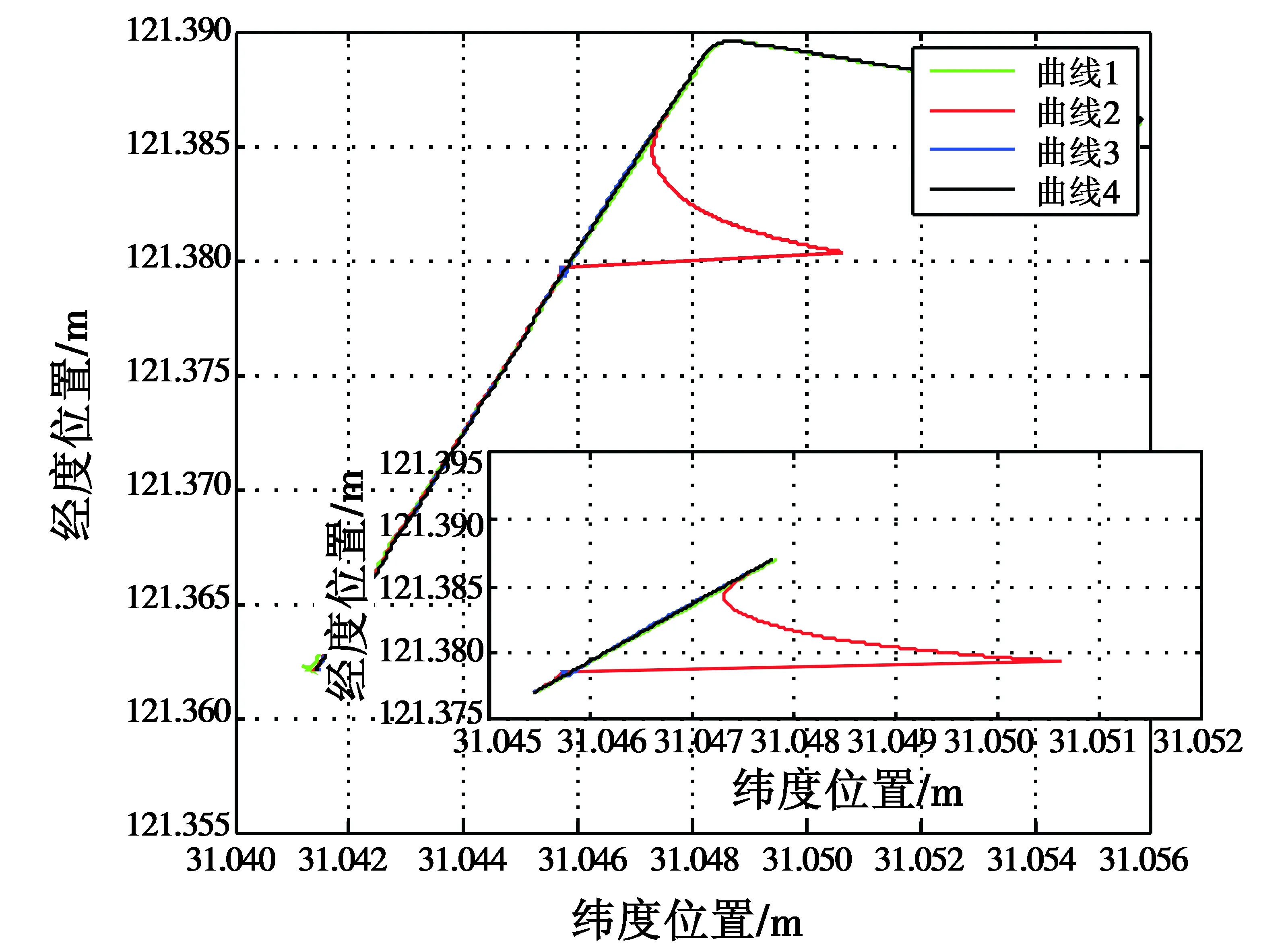
ω(t+τ)=a+2bτ+3cτ2+4dτ3+5eτ40<τ (2) 式中:a,b,c,d,e为拟合参数;ω为三轴角速度;τ为采样时刻;t为该周期起始时间。将t,t+T,t+2T,t+3T,t+H时刻角速率采样值代入式(2),可得 (3) 即Ax=B,故x=A-1B可求得角速度拟合系数。 通过角速度拟合系数可得角速度拟合曲线,而通过拟合曲线又可以得到下一个点的角速度拟合值ω(axis)fitting,将陀螺仪实际测量值与拟合值进行比较,不超过门限值ω(axis)err,则认为陀螺仪输出的角速度正常,否则为异常值,即 ωaxis-ω(axis)fitting<ω(axis)err (4) 本文试验中,ω(axis)err设为5 (°)/h。 当陀螺仪和加速度计输出的值满足式(1)和式(4),则输出值正常;否则为异常值,则用前一时刻IMU测量的值代替当前时刻的值进行捷联惯性导航。 GNSS接收机工作是否异常采用内外两层措施判断。 外层采用有效收星数和PDOP值判断,即 NGNSS>n,P (5) 式中:NGNSS为收星数;n为设定的收星数门限,一般设为4;P为空间位置精度因子;p为设置的空间位置精度因子门限,设为5。当满足式(5)时,继续进行内层判断,否则认为GNSS异常。 内层判断主要依靠捷联惯性导航系统短时间内具有较高导航精度的特性,对GNSS粗大误差进行判断,即 (6) 式中:位置误差阈值设为50 m;速度误差阈值设为3 m/s。当满足式(6)时,则认为GNSS接收机输出的数据正常,否则GNSS接收机输出的信息异常。 导航模式匹配是惯性/卫星容错组合导航系统的核心部分,其根据SINS和GNSS子系统的工作状态进入相应的工作模式,用来增强系统的适应性和鲁棒性。导航模式匹配的具体方法如下: 1) 当SINS,GNSS子系统工作均正常时,正常进行组合导航,其中组合滤波周期根据GNSS接收机的输出频率合理选择; 2) 当SINS子系统工作异常,GNSS子系统工作正常时,则用前一时刻惯导敏感到的角速度和比力代替当前时刻的测量值,即 (7) 3) 当SINS子系统工作正常,GNSS子系统工作异常时,则当前时刻不进行组合导航,进入丢星处理算法,具体如下:在丢星或卫星无效期间,正常计算每个组合时刻的状态转移矩阵,通过状态转移矩阵与丢星前正常组合估计出的状态变量(收敛值)相乘,可以得到当前时刻的状态一步预测值,通过状态一步预测值去修正捷联惯性导航系统 (8) 式中:φt0为丢星前正常组合估计出的平台失准角,采用反馈校正方式时,校正后清零;δVt0为丢星前正常组合估计出的速度误差,采用反馈校正方式时,校正后清零;δPt0为丢星前正常组合估计出的位置误差,采用反馈校正方式时,校正后清零;εt0为丢星前正常组合估计出的陀螺常值漂移;▽t0为丢星前正常组合估计出的加速度计常值偏置;Φt1为当前时刻的状态转移矩阵;φt1为当前时刻一步预测估计出的平台失准角,采用反馈校正方式时,校正后清零;δVt1为当前时刻一步预测估计出的速度误差,采用反馈校正方式时,校正后清零;δPt1为当前时刻一步预测估计出的位置误差,采用反馈校正方式时,校正后清零;εt1为当前时刻一步预测估计出的陀螺常值漂移;▽t1为当前时刻一步预测估计出的加速度计常值偏置。 惯性/卫星容错组合导航系统信息融合模块采用基于速度和位置的融合方式[5-7]。利用捷联惯性导航解算得到的速度和位置以及GNSS接收机测量得到的速度和位置构造观测量,进行卡尔曼滤波迭代解算,估计出状态变量X1×15的值,去修正捷联惯性导航的解算值。 为了保证系统的可靠性,在用状态估计值X1×15去修正捷联惯性导航系统之前,需对状态估计值的有效性进行判断,根据理论分析,对状态估计值X1×15中的各个变量设定门限,保证系统的可靠性,不会引入粗大误差。本文试验中对速度误差状态量和位置误差状态量的估计值进行了判断,位置误差状态估计值门限设为10 m,速度误差状态估计值门限设为0.5 m/s。 常规卡尔曼滤波[8]离散化系统状态方程和观测方程 (9) 其递推过程主要包括状态估值计算、状态一步预测、滤波增益、一步预测均方误差和估计均方误差等5步,具体如下所述。 状态估值计算方程为 (10) 状态一步预测方程为 (11) 滤波增益方程为 (12) 一步预测均方误差方程为 (13) 估计均方误差方程为 (14) 为了验证本文设计的容错组合导航方法与传统组合方法在卫星失效情况下的导航效果,采用一组弹道轨迹进行了仿真试验,仿真条件设置:陀螺零偏为100 (°)/h,陀螺白噪声为200 (°)/h;加速度计零偏为5×10-3g,加速度计白噪声为5×10-3g;GNSS接收机速度误差(3δ)为0.1 m/s,GNSS接收机位置误差(3δ)为10 m。初始位置:纬度为38.758°,经度为105.61°,高度为6000 m。初始速度:东向速度为0 m/s,北向速度为239.2 m/s,天向速度为-4 m/s。初始姿态:俯仰角为0°,滚转角为-180°,航向角为0°。弹道轨迹见图1。 图1 弹道轨迹Fig.1 Ballistic trajectory 仿真结果如图2~图4所示。曲线1为卫星接收机在100~150 s失效,传统组合导航方法结果曲线;曲线2为卫星接收机在100~150 s失效,本文设计的容错组合导航方法结果曲线;曲线3为全程卫星不失效,正常组合导航结果曲线。 图2 位置误差Fig.2 Position error 由图2~图4可以看出,在卫星失效后,此时传统的组合导航方法不能工作,进行纯捷联惯性导航,误差较大;本文设计的容错组合导航系统,在卫星失效后,通过丢星处理模块可以校正惯导陀螺和加速度计的零偏,减少系统的累计误差,在采用低精度惯性测量单元的情况下,可以很大程度地提高系统的导航精度。因此,本文设计的惯性/卫星容错组合导航系统在卫星失效的情况下取得了较好的效果。 图4 姿态角误差Fig.4 Attitude error 为了进一步验证本文设计的惯性/卫星容错组合导航系统在GNSS卫星接收机失效情况下的导航精度,进行了跑车试验,且将跑车试验过程中采集到的数据进行离线仿真试验。跑车试验中,惯性测量单元采用ADIS16488A,实测陀螺零偏小于100 (°)/h,陀螺白噪声小于200 (°)/h;加速度计零偏小于5×10-3g,加速度计白噪声小于5×10-3g;GNSS接收机由成都盟升公司提供,位置误差小于20 m,速度误差小于1 m/s。跑车实物图如图5所示。 图5 跑车实物图Fig.5 Vehicle experiment physical figure 跑车过程中试验车的位置二维曲线如图6所示。 半实物仿真试验结果如图7~图9所示。曲线1为GPS接收机的测量值,单天线GPS接收机不能测量姿态,故姿态结果曲线没有曲线1;曲线2为GPS接收机在250~300 s失效,传统组合导航方法结果曲线;曲线3为卫星接收机在250~300 s失效,本文设计的容错组合导航方法结果曲线;曲线4为全程卫星不失效,正常组合导航结果曲线。 图6 试验车位置二维曲线Fig.6 Two-dimensional curve of vehicle 图7 位置曲线Fig.7 Position curve 图8 速度曲线Fig.8 Velocity curve 由图7~图9可以看出,在卫星失效后,此时传统的组合导航方法不能工作,进行纯捷联惯性导航,误差较大;本文设计的容错组合导航系统,在卫星失效后,通过丢星处理模块可以校正惯导陀螺和加速度计的零偏,精度良好,且本方法可以剔除惯性测量单元和GNSS接收机的一部分野值,增加了系统的可靠性。卫星失效后,传统组合导航方法和本文容错组合导航方法的误差(GPS为基准)比较见表1。 表1 传统方法和本文方法的误差比较 图9 姿态角曲线Fig.9 Attitude curve 本文针对GNSS卫星接收机丢星失锁或失效,设计一种惯性/卫星容错组合导航系统,采用低精度惯性测量单元时,该容错组合导航系统在GNSS卫星接收机异常的情况下可以提高组合导航系统的精度和可靠性。最后,通过仿真试验和跑车试验对本文设计的惯性/卫星容错组合导航系统进行了验证,取得较好的效果。 [1] 张晓亮.GPS/SINS组合导航系统应用研究[D].南京:南京理工大学,2013. [2] 陈帅.精确制导炸弹低成本惯导/卫星组合导航方法研究[D].南京:南京理工大学,2008. [3] 孙丽.激光捷联惯导/星光/卫星容错组合导航系统研究[D].西安:西北工业大学,2007. [4] 雷浩然,陈帅,程晨.一种弹载多级容错组合导航系统设计[J].航天控制,2013,31(5):19-24. [5] 王朋辉.高动态GPS/INS组合导航系统研究[D].南京:南京航空航天大学,2010. [6] 李端勇.基于信息融合的组合导航系统研究[D].西安:西北工业大学,2005. [7] 马云峰.MSINS/GPS组合导航系统及其数据融合技术研究[D].南京:东南大学,2006. [8] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安: 西北工业大学出版社,1998. Design of a Fault-Tolerant SINS/GNSS Integrated Navigation System DONG Liang, ZANG Zhong-yuan, XU Dong-huan, ZHONG Ke-wei, ZHANG Xiao-che (Shanghai Institute of Spaceflight Control Technology,Shanghai 201109,China) Considering that GNSS satellite receiver is easy to lose stars in high dynamic situation or in urban canyons,and GNSS satellite receiver may fail in the case of signal interference,we designed a fault-tolerant SINS/GNSS integrated navigation system.In this paper,the design scheme of the fault-tolerant integrated navigation system is described in detail.The various types of abnormalities that may occur are analyzed,and the appropriate treatment strategies are given.The fault-tolerant integrated navigation method can improve the reliability and the accuracy of the system in case that GNSS satellite receiver is abnormal.The simulation test and vehicle test designed for the fault-tolerant SINS/GNSS integrated navigation system achieved good results. fault-tolerant integrated navigation system; SINS; GNSS; lost star; vehicle test 董亮,臧中原,许东欢,等.一种惯性/卫星容错组合导航系统设计[J].电光与控制,2017,24(9):104-108.DONG L,ZANG Z Y,XU D H,et al.Design of a fault-tolerant SINS/GNSS integrated navigation system[J].Electronics Optics & Control,2017,24(9):104-108. 2016-08-08 2017-06-08 董 亮(1991 —),男,安徽宣城人,硕士,工程师,研究方向为导航、制导与控制。 V249.32+8; TN967.1 A 10.3969/j.issn.1671-637X.2017.09.022
1.2 GNSS异常判断
1.3 导航模式匹配

1.4 状态估计值X1×15异常判断
2 卡尔曼滤波


3 试验与分析
3.1 仿真试验

3.2 跑车试验





4 结束语