基于在线模型的飞控系统传感器的故障诊断
2018-01-11王余伟
王余伟, 曹 东, 李 勇
(南京航空航天大学自动化学院,南京 211106)
基于在线模型的飞控系统传感器的故障诊断
王余伟, 曹 东, 李 勇
(南京航空航天大学自动化学院,南京 211106)
传感器是测量无人机姿态信息的核心,传感器为无人机的飞行提供安全、可靠、全面的数据信息。飞机的安全很大程度上取决于传感器是否故障。故障诊断技术的研究,有利于提高飞行器的运行安全可靠性。首先,对无人机机载传感器的工作原理进行分析,在此基础上建立无人机执行机构的解析模型。以模型为依据,对无人机的传感器进行特性仿真。其次,利用了一种基于残差的阈值-改进SPRT联合诊断算法,从残差中提取故障特征,对传感器的工作状态做出检测和判断。最后,建立了传感器故障常见的数学模型,亦对传感器故障特性进行仿真验证。结果表明,这种方案能有效提高传感器故障的诊断精度,故障诊断算法有效。
飞控系统; 传感器; 解析模型; 故障诊断
0 引言
飞行控制系统中有各式各样的传感器,传感器可以为飞行控制系统提供全面、可靠、精确的数据信息,为无人机的飞行提供了安全保障。由于传感器的重要性和其自身的特性,对传感器进行实时的状态检测和故障诊断是非常必要的[1]。在飞行控制系统中,惯性
1 方案设计
执行机构运行状态正常的情况下,在无人机飞行控制系统在线模型中输入舵偏角传感器测得的执行机构提供的位置信息,把传感器所测真实无人机在飞行过程中的状态参数与在线模型解算输出的信息进行比较,从而生成残差,再进行残差决策,从而提取有效的残差特征[3]。图1为传感器故障诊断策略示意图。本文采用阈值-改进SPRT联合诊断算法对传感器模块的残差进行评价,该算法不仅能够快速地检测出传感器模块的大值阶跃性故障,而且也能准确地检测出小值缓变性故障[4]。

图1 传感器故障诊断策略示意图Fig.1 The diagram of sensor fault diagnosis strategy
传统的传感器故障诊断方法主要是在线模型,不足之处在于测量的精度不足。本文以在线模型为基础,在其方法上加入模型校正环节来弥补在线模型不足,同时为了能提高传感器故障诊断的精确度,本文采用数据融合分析作为辅助决策的故障诊断方法[5]。
2 传感器仿真及其故障特性分析
2.1 传感器特性仿真
飞行控制系统中有多种机载传感器,本文主要对IMU、大气机、GPS和迎角传感器进行特性仿真和故障特性分析。本文需要模拟传感器在无人机飞行过程中传出信息的相关特性,包括动态特性、电气特性和数据传输协议,同时模拟传感器输出相应的数据格式等。传感器特性仿真将仿真传感器输出的信息定时地发送到飞行控制系统中,系统将信息发送到飞行控制与管理模块进行结算,目的是能够形成完整的控制闭环回路。
2.2 传感器故障特性分析
传感器故障分类有以下几种方法:1) 按照故障产生原因分类;2) 按照故障发生的时间特性分类;3) 按照故障发生程度大小分类。
本文重点介绍按照传感器故障产生原因的分类,同时按照此分类方法又可以将传感器分为传感器偏差失效故障、短路故障、增益变化故障、恒偏差故障和卡死故障等,从上述故障中选取3种典型的故障进行重点分析,包括传感器增益变化、偏差失效、卡死等故障。通过传感器故障的表现形式和生成原因综合分析,用数学模型ym(k)=s(k)yc(k)+d(k)表示传感器故障,其中,yc(k)表示输出期望值,ym(k)表示输出实际传感器的值,s(k)表示增益,k表示当前拍数,d(k)表示输出值产生的偏差,传感器故障模式的不同,等式中各参数取值也不同:1) 当仿真控制台没有注入传感器无故障时,s(k)=1,d(k)=0;2) 当通过仿真控制台注入传感器恒偏差故障时,设定s(k)=1,d(k)为某个固定值;3) 当通过仿真控制台注入传感器发生卡死故障时,s(k)=0,d(k)为某个固定值,即传感器卡死位置时d(k)的值;4) 当通过仿真控制台注入传感器发生增益变化故障时,s(k)>1,d(k)=0;5) 当通过仿真控制台注入传感器发生渐变漂移故障时,设定s(k)=1,d(k)随时间的变化而变化[6]。
3 传感器故障诊断算法设计
本文采用的传感器故障诊断算法是基于残差的阈值-改进SPRT联合算法,该算法能够有效地改进阈值分析法中不能灵敏诊断出小值缓慢变化性故障的缺点,也能有效地提高改进序贯概率比算法(SPRT)中不能实时判决阶跃性故障和不能准确判断故障诊断时间的缺点[7]。
3.1 阈值分析法
阈值分析法是一种在规定的范围内设定残差阈值的方法。阈值分析法能够快速诊断出超出其阈值范围的大值阶跃性故障,对于超出其阈值范围的小值阶跃性故障则响应缓慢。同时,阈值分析法中合理地设定残差阈值是检测出故障的重要因素,通过系统给出的残差值与设定的残差阈值进行比较,如果残差阈值设定过大,系统故障发生时,若阈系统给出的残差值小于设定残差阈值,会造成系统故障诊断不够实时或发生漏检;如果残差阈值设定过小,系统故障发生时,若阈系统给出的残差值大于设定残差阈值,会让系统发生错误的判断,造成虚警。
3.2 改进SPRT算法
改进SPRT算法是一种基于概率比假设检验的算法,在给定虚警率和漏检率的情况下,以最短的时间检测出执行机构故障的方法。
假设由H0和H1分别表示系统运行时的正常状态和发生故障的状态,根据最大后验概率准则,可知

(1)
式(1)可以转换为

。
(2)
式(2)中,P(H0)和P(H1)分别为状态H0和状态H1的先验概率。系统运行时,采集残差的N次值,得到采样序列XN=[x1,x2,…,xN],计算似然比LN(X)为

。
(3)
从而计算可得对数似然比lnLN(X)为

。
(4)
可知,当对数似然比lnLN(X)小于T(H1)时,系统处于正常状态,而当系统处于故障状态时,对数似然比的值一直变大并且达到或者大于T(H1)。
假设给定虚警率α和漏检率β,由Wald公式可得
。
(5)
由式(5)可得,当系统状态运行正常时,对数似然比逐渐在变小并变成负值,如果此时系统出现故障后,对数似然比逐渐变大,但对数似然比由负值增加到0需要经过几步才能增加到判决门限,这种情况严重影响了故障检测的实时性。在此基础上引入补偿环节,其作用是可以消除系统运行时带来的延时,同时在系统发生故障的情况下,能够更加快速地检测到故障[8]。
3.3 阈值-改进SPRT联合算法
本文通过对比和分析阈值分析法与改进SPRT算法的优缺点,设计出一种阈值-改进SPRT联合算法,该算法不仅结合上述两种算法各自的优点,而且通过决策手段克服了两种算法各自的缺点。图2为阈值-改进SPRT联合算法示意图。
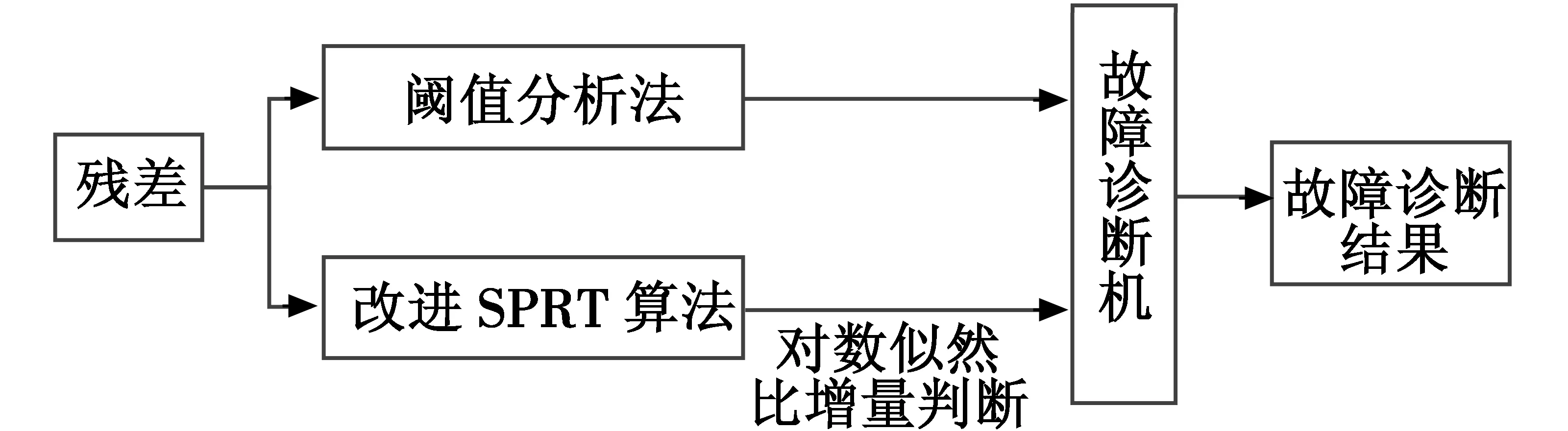
图2 阈值-改进SPRT联合算法示意图Fig.2 Schematic diagram for threshold-improved SPRT united ALG
该算法将所得残差的值分别输入到阈值分析法和改进SPRT算法,由两种算法分别对输入的残差值进行计算和比较,将阈值分析法和改进SPRT算法分析的结果同时交给故障诊断机进行分析和判决。当对数似然比为负值时,系统中传感器给的残差值正在变小,可能出现大值阶跃性故障,采用阈值分析法的结果更能够检测出故障结果。当对数似然比为正增量时,系统输出的残差可能出现小值缓变故障,采用改进SPRT算法检测出结果[9]。
4 仿真与验证
针对几种机载传感器常见的故障,本文模拟了大噪声故障下的GPS特性(如图3所示),渐变漂移故障下的IMU特性(如图4所示),卡死故障下的大气机特性(如图5所示)和恒偏差故障下的迎角传感器特性(如图6所示)。通过对各传感器进行故障注入,验证了引入在线模型以实现传感器故障诊断的可行性。仿真时,通过在信息中叠加故障特征实现传感器故障注入。设定虚警率α=0.2%,漏检率β=0.2%,T(H1)=6.2。图3~图6中Simu曲线表示飞行状态参数的仿真值,在真实飞行状态中,该信息由机载传感器测出。
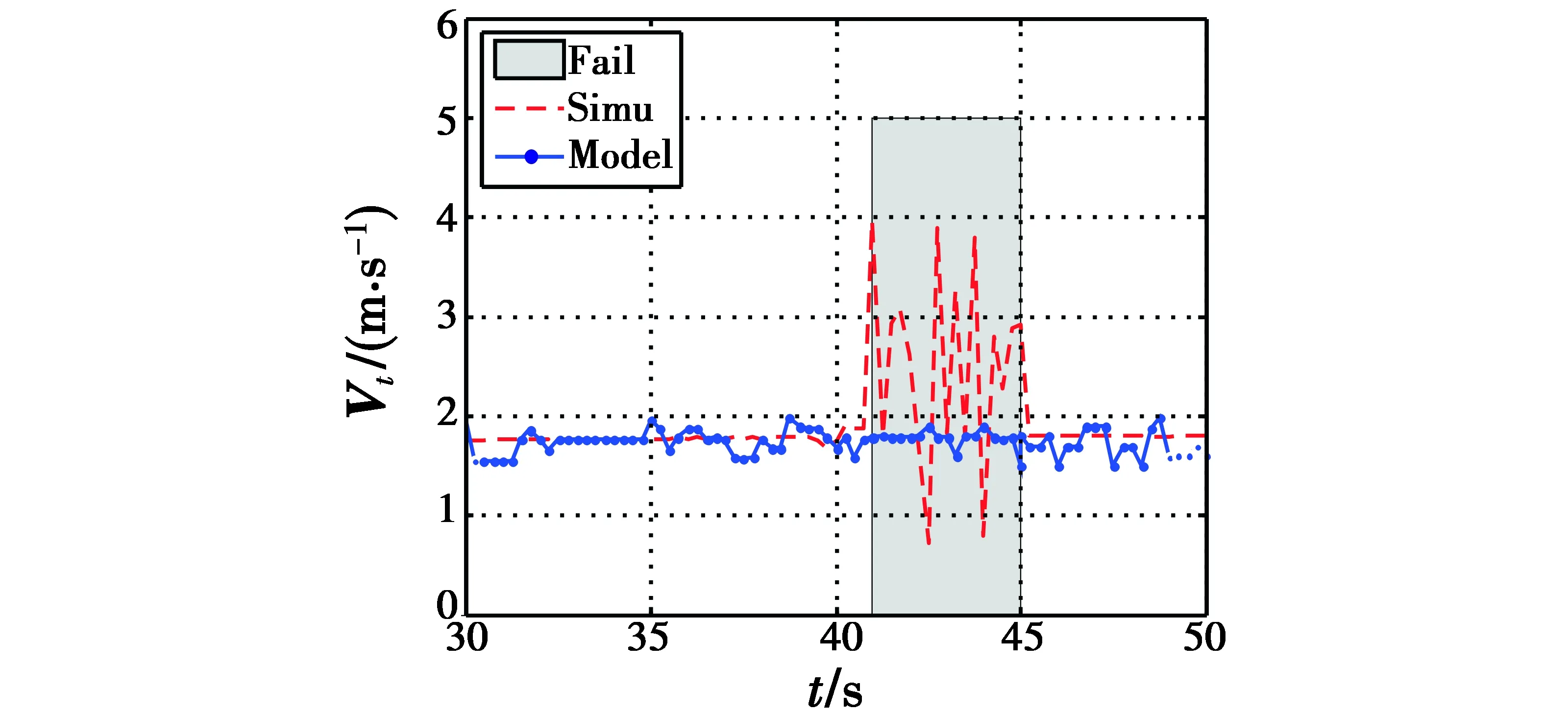
图3 GPS大噪声故障诊断仿真曲线图Fig.3 Simulation graph of GPS noise fault diagnosis

图4 IMU漂移故障诊断仿真曲线图Fig.4 Simulation graph of IMU drift fault diagnosis

图5 大气机卡死故障诊断仿真曲线图Fig.5 Simulation graph of atmospheric engine stuck fault diagnosis
系统具有飞行控制与管理功能和在线模型解算功能是仿真试验飞行的主要条件。在飞行仿真中通过注入故障位置(传感器)、故障类型(噪声、漂移、卡死、恒偏差等)、故障注入时刻等方式验证系统对传感器故障的诊断功能。
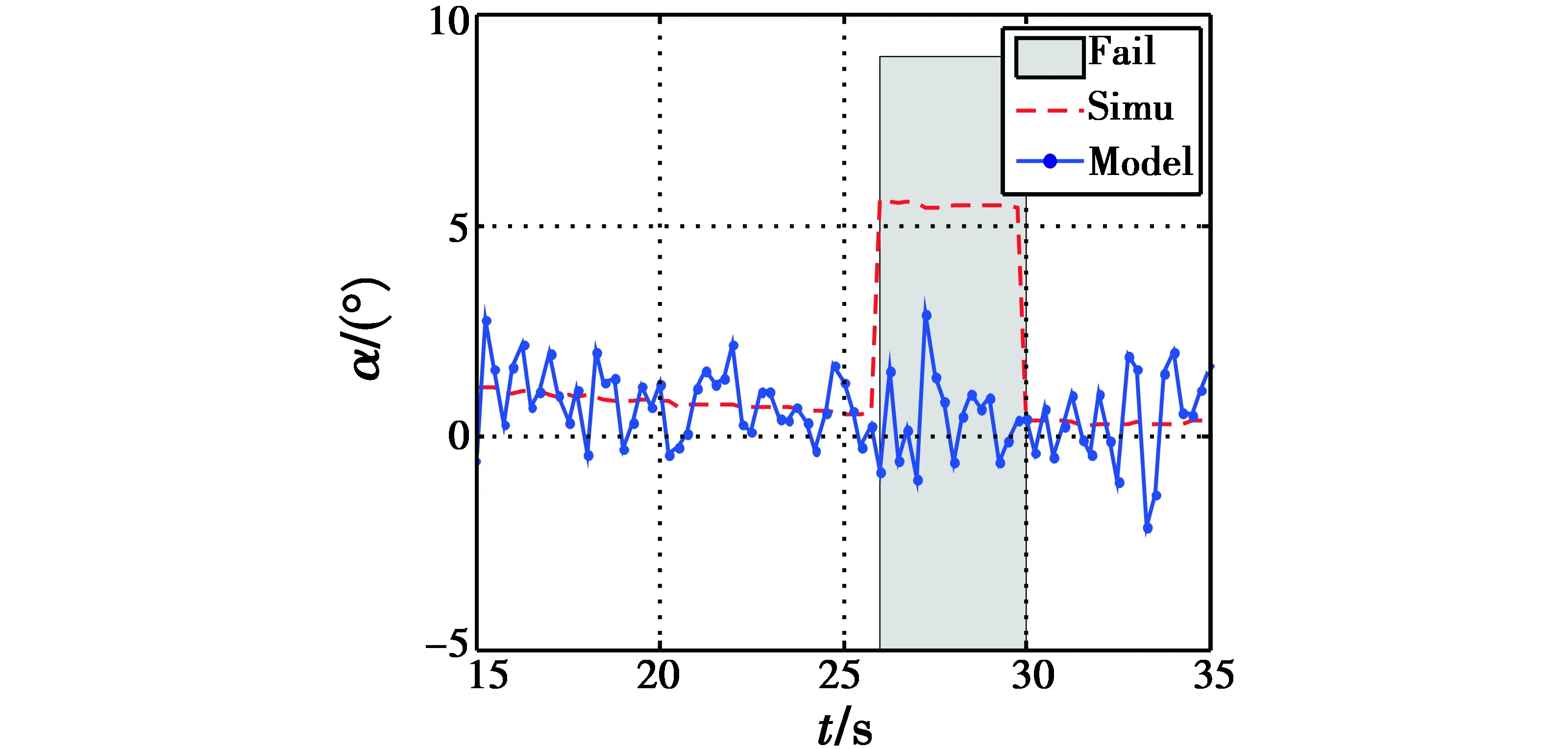
图6 迎角恒偏差故障诊断仿真曲线图Fig.6 Simulation graph of angle deviation fault diagnosis
1) 以传感器GPS为例。传感器GPS测试的故障类型为大噪声故障,以GPS传感器中输出天向速度信息来模拟大噪声故障。系统正常状态下通过仿真控制台在运行时间第40~45 s内注入大噪声故障到控制系统中,如图3所示。在图3中,系统采用了基于残差的阈值-改进SPRT算法,图中以蓝色曲线Model表示在线模型解算出的天向速度,红色曲线Simu表示由仿真得出的GPS传感器输出的天向速度。由图3可以看出,当干扰信号为传感器大噪声故障且干扰尚未发生时,曲线Model和曲线Simu具有很好的重合性。而当噪声故障发生时,图中以阴影Fail表示,上述两条曲线失去原本的重合性,并出现较大的数值残差。系统在故障注入后第41 s时诊断出故障并报警。
2) 以传感器IMU为例,传感器渐变漂移故障作为测试传感器IMU的故障类型,以IMU传感器中输出的滚转角数据来模拟渐变漂移故障。系统正常状态下通过仿真控制台在运行时间的第30~35 s内将滚转角以2 (°)/s注入到控制系统中,假设5°的阈值,如图4所示。在图4中,系统采用了基于残差的阈值-改进SPRT算法,图中以蓝色曲线Model表示在线模型解算出的滚转角,红色曲线Simu表示由仿真得出的IMU输出的滚转角。由图4可以看出,当干扰为传感器渐变漂移故障且干扰尚未发生时,曲线Model和曲线Simu具有很好的重合性。而当传感器渐变漂移故障发生时,图中以阴影Fail表示,上述两条曲线失去原本的重合性,并出现较大的数值残差。并且该数值残差以固定的速度增长。系统在故障注入后第32 s时诊断出故障并报警。
3) 以传感器大气机为例。传感器卡死故障作为传感器大气机测试的故障类型,以大气机传感器中输出的高度信息来模拟卡死故障。系统正常状态下通过仿真控制台在运行时间的第30~40 s期间注入高度卡死故障到系统中,假设15 m的阈值,如图5所示。从图5对比可以看出,系统采用了基于残差的阈值-改进SPRT算法,图中以蓝色曲线Model表示在线模型解算出的传感器大气机的气压高度,红色曲线Simu表示由仿真控制台输出的大气机传感器的气压高度。由图5可知,当干扰信号为传感器卡死故障且干扰信号尚未注入时,曲线Model和曲线Simu具有很好的重合性。而当传感器卡死故障发生时,图中以阴影Fail表示,上述两条曲线失去原本的重合性,并出现较大的数值残差,并且该数值残差以固定的速度增长。系统在故障注入后第32 s时诊断出故障并报警。
4) 以迎角传感器为例。传感器恒偏差故障作为迎角传感器测试的故障类型,以迎角传感器中输出的迎角来模拟传感器恒偏差故障。系统正常状态下通过仿真控制台在系统运行的第25~30 s把故障注入系统中,假设3°的阈值,如图6所示。在图6中,系统采用了基于残差的阈值-改进SPRT算法,图中,以蓝色曲线Model表示在线模型解算出的迎角,红色曲线Simu表示由仿真得出的迎角传感器输出的迎角。由图6可知,当干扰信号为传感器恒偏差故障且干扰信号尚未注入时,曲线Model和曲线Simu具有很好的重合性。而当传感器恒偏差故障发生时,图中以阴影Fail表示,上述两条曲线失去原本的重合性,并出现较大的数值残差。系统在故障注入后第26 s时诊断出故障并报警。
由上述验证可知,本文设计的阈值-改进SPRT联合算法不仅能有效地识别小值缓变性故障,而且也能够精确地识别出大值阶跃性故障,这两点表明了该算法的合理性和算法的优越性[10]。
5 结束语
本文利用基于残差的阈值-改进SPRT联合诊断算法实现了传感器故障检测和分析,这种算法提取了阈值分析法和改进SPRT联合诊断算法的优点,改进两种方法的不足,同时利用了基于在线模型的故障检测算法[11]。通过实验仿真可知,该算法能够达到飞控系统对传感器在线故障检测的要求。
[1] XIA G H.Failure detection,isolation and compensation[D].California:University of California,1982.
[2] SPANG H A,CORLEY R C.Failure detection and correction for turbofan engine[R].Generic Electric Co.,TIS Report 77 CRD 159,1977.
[3] RUOKONEN T.Nonlinear filtering techniques for failure detection in dynamic systems[D].Boca Raton:Florida Atlantic University,1989.
[4] 张登峰,王执铨,孙金生.控制系统故障诊断的理论与技术[J].数据采集与处理,2002,17(3):293-299.
[5] 杨伟,章卫国,杨朝旭.容错飞行控制系统[M].西安:西北工业大学出版社,2007.
[6] 黄孝彬,刘吉臻,牛玉广.控制系统执行机构故障的检测与诊断[J].控制工程,2003,10(s1):165-169.
[7] GUO Y Y,JIANG B,ZHANG Y M,et al.Novel robust fault diagnosis method for flight control systems[J].Journal of Systems Engineering and Electronics,2008,19(5):1017-1023.
[8] MERRILL W C.Sensor failure detection for jet engines using analytical redundancy[J].Journal of Guidance Control & Dynamics,2012,8(6):673-682.
[9] 郑志强,袁海文.基于模糊多模型结构的飞行控制系统执行器故障诊断[J].兵工学报,2010,31(3):380-384.
[10] GOPISETTY S W.Failure detection and identification:application to aircraft control[D].Princeton:Princeton University,2000.
[11] LI X R,WANG L.Fault detection using sequential probability ratio test[C]//Power Engineering Society Winter Meeting,IEEE,1999:938-943.
FaultDiagnosisofSensorsofFlightControlSystemBasedonAnalyticalModel
WANG Yu-wei, CAO Dong, LI Yong
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
Being the core for attitude information measurement,the sensors onboard UAV can supply safe,reliable and comprehensive information,and their working status directly affects the safety of the plane. By means of fault diagnosis technology,we can realize early detection of faults,thus to avoid malignant accidents and enhance the operation safety and reliability of aircraft. In this paper,analysis is made to the working principle of the sensors onboard the UAV,and an analytical model of the execution mechanism of the UAV is established. Based on the model,the characteristics of the sensors are simulated. Then,a fault diagnosis algorithm,threshold-improved SPRT united ALG based on residual errors,is used for extracting the fault features from residual errors,thus to detect and determine the working status of sensors. Finally,a common mathematical model of actuator’s fault is established,and the fault characteristics of the sensor are simulated. The result shows that this scheme can effectively improve the accuracy of sensor fault diagnosis,and the fault diagnosis algorithm is effective.
flight control system; sensor; analytical model; fault diagnosis
王余伟,曹东,李勇.基于在线模型的飞控系统传感器的故障诊断[J].电光与控制,2017,24(7):81-84,94.WANG Y W,CAO D,LI Y.Fault diagnosis of sensors of flight control system based on analytical model[J].Electronics Optics & Control,2017,24(7):81-84,94.
TP277
A
10.3969/j.issn.1671-637X.2017.07.017
2016-06-13
2017-04-10
王余伟(1992 —),男,江苏连云港人,硕士生,研究方向为先进无人机飞行控制软件、嵌入式系统。导航传感器、IMU、大气机和GPS等是飞控系统常用的传感器,典型的传感器故障模式有卡死故障、恒偏差故障、增益变化故障和渐变漂移故障等[2]。
