基于径向速度检验的雷达网距离多假目标鉴别
2018-01-11王国宏张翔宇
吉 喆, 王国宏, 张翔宇
(海军航空工程学院信息融合研究所,山东 烟台 264001)
基于径向速度检验的雷达网距离多假目标鉴别
吉 喆, 王国宏, 张翔宇
(海军航空工程学院信息融合研究所,山东 烟台 264001)
针对雷达网在鉴别距离多假目标干扰过程中,鉴别效果随距离多假目标密集程度增大而变差的问题,提出了一种基于目标径向速度估计的距离多假目标干扰鉴别方法。首先,选定基准雷达并进行量测分组预处理,将其他组网雷达目标量测转换至基准雷达局部坐标系下进行基于位置信息的量测关联,以初步排除不相关的虚假量测与杂波,同时减小计算量;然后,基于坐标转换后量测的位置信息估计出目标径向速度,与基准雷达径向速度量测进行检验,以实现虚假目标的鉴别。仿真结果表明,此方法在距离多假目标密集程度较大的情况下具有较高的正确鉴别率,且能够对目标进行稳定跟踪。
雷达网; 距离多假目标干扰; 坐标转换; 位置信息; 径向速度检验
0 引言
随着现代电子战技术的逐渐发展,雷达组网的方式正在越来越多地应用于目标的跟踪探测[1-3],而对于雷达网的干扰方式也随之不断更新[4-8]。欺骗式干扰通过运用DRFM[9-11]等先进的器件对雷达信号进行
距离多假目标干扰是对雷达距离信息欺骗的一种重要方式。文献[16]基于真实目标的位置信息,经过同源量测融合与多目标跟踪处理实现了虚假目标剔除,然而该文献对于距离多假目标的欺骗距离,即密集程度并未加以考虑;文献[17]与文献[18]均基于真实目标与虚假目标的空间分布特性的差异进行分析,定性地给出了虚假目标密集程度与鉴别概率的关系,但对于距离假目标间距减小对雷达网虚假目标鉴别带来的影响并未给出相应的解决方法。而现有文献对于距离假目标的鉴别方法中均涉及到最近邻关联法,此方法分析了组网雷达探测到的真实目标位置信息,通过分析真-假目标的位置关系可以实现对有源假目标的有效鉴别[19]。然而基于DRFM等先进器件的干扰设备通过对雷达发射信号的复制、调制与转发可以有效控制欺骗距离的大小,使得距离假目标在空间位置分布上更加接近于真实目标,因此,仅仅基于目标量测位置信息分析的方法难以有效改善对虚假目标的鉴别能力。文献[20]提出了一种利用目标的位置信息与速度量测信息相结合的方法进行虚假目标的鉴别,然而此方法要求组网雷达必须两两进行组合,且组网雷达中必须至少含有3部测速雷达,这对于两雷达组网的情况并不适用。
针对以上问题,本文提出了一种基于目标径向速度检验的虚假目标鉴别方法,首先利用组网雷达间量测转换后基于位置信息进行量测预处理,然后在此基础上,利用各组网雷达之间目标位置信息估计出径向速度并与测速雷达径向速度量测信息进行比对检验,最终实现对虚假目标的有效鉴别。
1 问题描述
在组网雷达受到距离多假目标欺骗干扰时,在不考虑随机误差的情况下,雷达、干扰机、虚假目标应当近似处于同一直线上,如图1所示。由于目标与雷达相对位置变化的实时性,雷达相同角度方向上一般只有一个真实目标,若雷达在此方向上探测到多个量测,则其中应当包含多个虚假目标[15]。
假设组网雷达中含有至少一部具备测速功能的雷达,以双基地雷达组网为例,不失一般性,选择具备测速功能的雷达1为基准雷达。
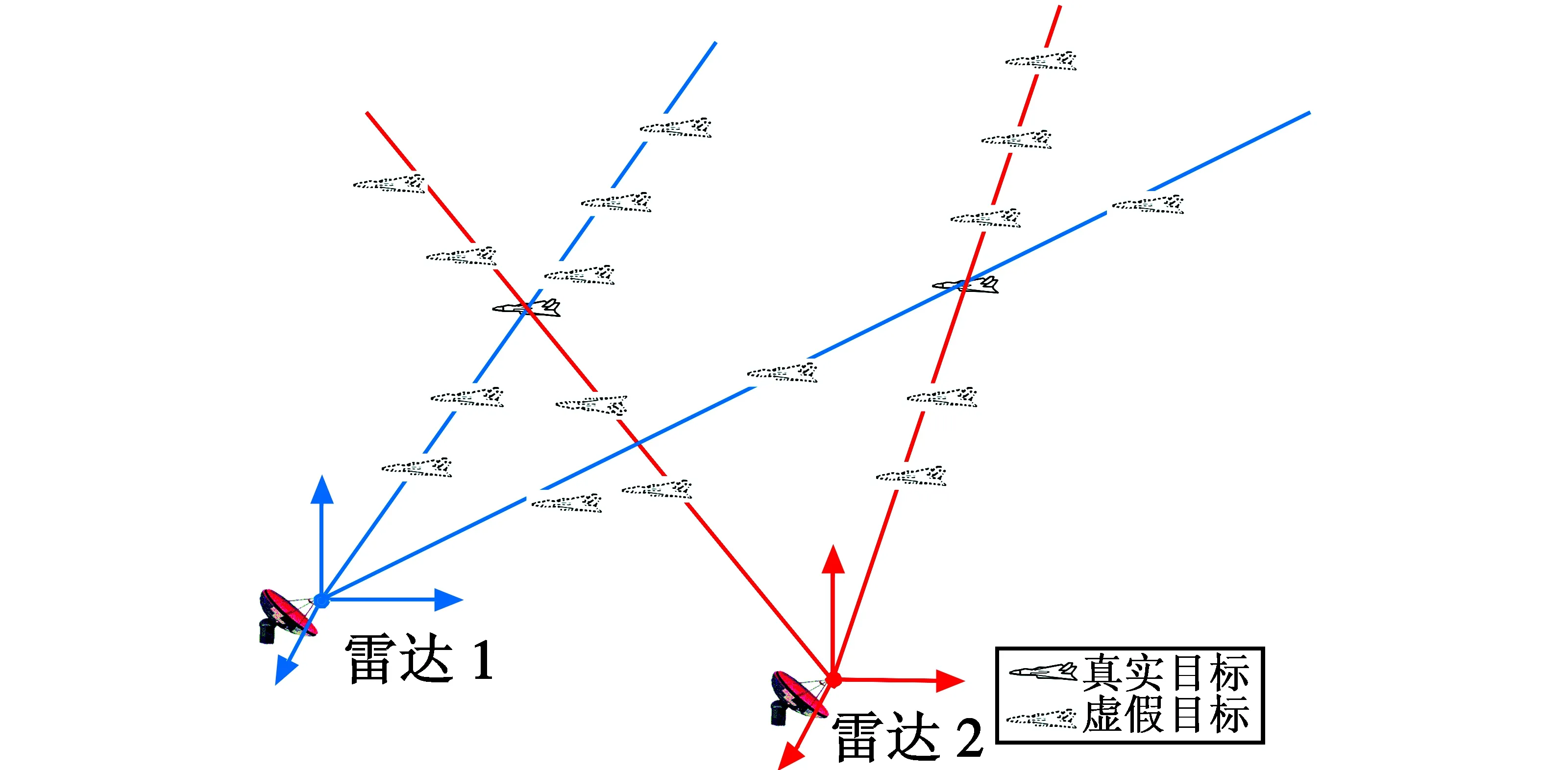
图1 距离多假目标干扰示意图Fig.1 Diagram of multi-range-false-target jamming
2 组网雷达量测数据预处理
2.1 基准雷达量测分组与数据压缩
假设k时刻雷达1第i个量测的距离为ρi(k),方位角为θi(k),俯仰角为εi(k),第j个量测的距离、方位角和俯仰角分别为ρj(k),θj(k),εj(k)。对雷达1量测进行分组,即

(1)

2.2 基于量测位置信息的关联检验
经过对基准雷达量测进行分组后,每个分组中的量测均可以近似确定一条直线,如图1所示。在不存在随机误差的情况下,对于来自同一真实目标的量测,若组网雷达能够成功捕获此目标,则必有基准雷达与其他组网雷达之间量测分组所在直线的“相交”,而“交点”便是此真实目标,且组网雷达能够探测到非自身角度量测方向上虚假目标的概率极低,基于这个特点,将基准雷达各个分组中的量测分别与其他组网雷达目标量测进行基于位置信息的关联检验,以判断基准雷达量测是否处于“直线交点”附近。建立马氏距离统计量,即
η2(k)=ΔT(k)(R2to1(k)+Rl(k))-1Δ(k)
(2)
当距离多假目标之间的密集程度增大时,真实目标与虚假目标之间的距离变小,造成错误关联的概率也随之变大,因此,需要引入新的目标量测信息以用于改善鉴别效果。
3 基于目标径向速度信息的欺骗干扰鉴别
考虑到模型的非线性较强,本文采用扩展卡尔曼滤波算法(EKF)进行非线性滤波估计。
3.1 基于位置信息的目标径向速度估计
对于通过预处理的基准雷达中雷达2的各个潜在真实目标量测,经过数据互联后,基于位置信息的状态方程与极坐标量测方程分别为
X1(k+1)=FX1(k)+V(k)
(3)
Z1(k)=h1(X1(k))+W1(k)
(4)
式中:量测向量Z1(k)=(ρ2to1(k)θ2to1(k)ε2to1(k))T;
;
(5)
W1(k)是量测噪声,其协方差阵为
。
(6)
设k时刻由式(3)~式(6)得到目标速度估计矢量为
(7)
。
(8)
由式(7)和式(8)得,估计速度V(k)在τ(k)方向上的投影,即基准雷达坐标转换量测所估计的径向速度为

(9)
所估计的径向速度方差为
(10)
式中:P为k时刻的速度估计和位置估计的协方差阵[21];
(11)
3.2 基于径向速度检验的虚假目标鉴别

。
(12)
Zreal,q(k)={(ρ2to1,l,p(k),θ2to1,l,p(k),ε2to1,l,p(k)), (ρ1,l(k),θ1,l(k),ε1,l(k))}
(13)
式中:(ρ2to1,l,p(k),θ2to1,l,p(k),ε2to1,l,p(k))表示雷达2转换至基准雷达后对应基准雷达第l个分组方向上的第p个目标量测;(ρ1,l(k),θ1,l(k),ε1,l(k))表示基准雷达第l个分组方向上的真实目标量测;Zreal,q(k)的下标q表示第q个真实目标量测集合。本文将通过径向速度检验后的两个量测视为组网雷达探测到的同一个真实目标量测。
4 滤波跟踪
4.1 真实目标量测融合
假设某时刻通过检验后的集合Zreal,q(k)中共有L个量测,则这L个量测被认为是同一个目标量测,为提高雷达网的测量精度,将集合Zreal,q(k)中的量测进行基于点迹合成的融合处理,其中,真实目标的径向速度量测采用基准雷达的径向速度量测v1(k)。
对于集合Zreal,q(k)中的量测向量Z1(k),Z2(k),…,ZL(k),与之相对应的量测误差协方差R1(k),R2(k),…,RL(k),进行融合处理后得到新的量测数据与协方差数据[21],即
(14)
。
(15)
4.2 目标跟踪
利用扩展卡尔曼滤波算法进行滤波和估计。根据前文的分析,融合后的真实目标量测为
。
状态方程与量测方程分别为
X(k+1)=FX(k)+V(k)
(16)
Z(k)=h(X(k))+W(k)
(17)
式中:
(18)
W(k)为量测误差,其协方差阵为R(k),即将径向速度所对应元素加入式(14)~式(18)。
5 仿真分析
假设真实目标轨迹在地理坐标系下产生,目标量测在雷达局部极坐标系下产生,目标跟踪在地心直角坐标系(ECEF)下实现[21]。
5.1 仿真条件
假设雷达1的地理坐标为经度37.0°、纬度120°、高度100 m,雷达2的地理坐标为经度37.5°、纬度120°、高度300 m。两部雷达的测距精度均为100 m,方位角、俯仰角测量精度均为0.1°,径向速度测量精度均为1 m/s,采样周期均为1 s;真实目标起始位置为经度37.3°、纬度121.3°、高度10 000 m,相对雷达1的E,N,U这3个方向上的运动速度为340 m/s,-200 m/s,-25 m/s;雷达网对目标连续观测200 s,目标检测概率为1。
假设真实目标自身携带干扰设备,干扰设备通过捕获组网雷达的信号,同时进行复制、调制与转发,能够实施有效的距离多假目标欺骗干扰。干扰过程中,干扰设备在真实目标两侧每间隔1300 m(欺骗距离)产生1个虚假目标,每侧各产生10个,共20个虚假目标,蒙特卡罗仿真次数均为500次。
5.2 本文方法虚假目标鉴别效果分析
5.2.1 不同虚假目标密集程度下目标识别率
假设干扰机在调制产生虚假目标的过程中,虚假目标多普勒信息与其运动状态出现“不匹配”的现象,由这个现象产生的径向速度偏差设为10 m/s;其他仿真条件不变,改变距离多假目标的密集程度,即将干扰机欺骗距离从3000 m均匀减小至500 m,得到某时刻(这里取第50时刻)本文方法与仅基于位置信息鉴别欺骗干扰的方法的真实目标正确识别率,如图2所示。
从图2的仿真结果可以看出,随着距离多假目标的密集程度不断增大,仅基于位置信息的鉴别方法的正确识别率出现大幅下降的趋势,而本文方法始终保持较高的正确识别率。分析其原因可知,当欺骗距离较大(大于2500 m)时,距离多假目标之间间隔较大,组网雷达目标量测点之间相互关联成功的概率随之提高,因此,基于位置信息检验方法能够有效鉴别出真实目标与虚假目标;而当欺骗距离逐渐减小时,距离多假目标之间的间隔随之变小,使得组网雷达目标量测点之间发生错误关联的概率大大增加,仅基于位置信息将很难区分出真假目标量测,因此导致正确识别率大幅降低;而本文方法在目标位置信息的基础上,通过将测速雷达得到的目标径向速度信息与基于位置信息估计出的径向速度进行作差、构建检验量来进行统计判决,将基于位置信息关联检验后存在的多对量测组合做进一步筛选,最终实现真假目标的区分,由此保证了在距离多假目标密集程度较大情况下的真实目标识别率。
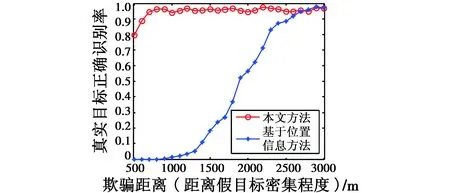
图2 距离多假目标密集程度(欺骗距离)对真实目标正确识别率的影响Fig.2 Influence of intensive degree of multi-range-false- target(deception range) on correct recognition rate
5.2.2 真假目标径向速度差异对识别率的影响
其他仿真条件不变,改变由“不匹配”现象产生的径向速度偏差,使其从0.4 m/s均匀增大至20 m/s,得到某时刻(这里取第50时刻)本文方法在不同欺骗距离情况下的真实目标正确识别率,如图3所示。
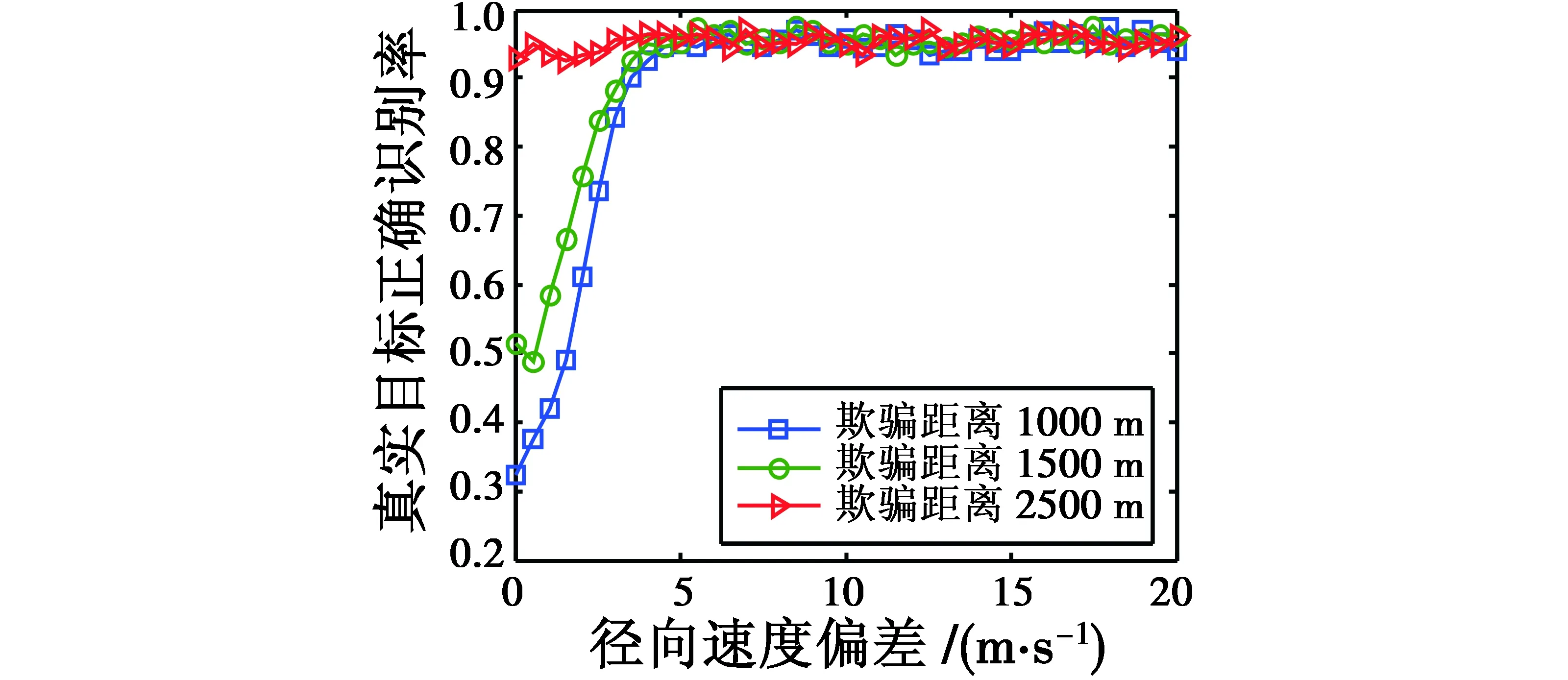
图3 “不匹配”的径向速度偏差对真实目标正确识别率的影响Fig.3 Influence of mismatching radial velocity deviation on correct recognition rate
从图3的仿真结果可以看出,当速度偏差较大时(大于5 m/s),真实目标正确识别率保持在较高的水平;当速度偏差较小时(小于5 m/s),正确识别率在欺骗距离较大(2500 m)的情况下无明显变化,而当欺骗距离逐渐减小时,正确识别率随速度偏差的减小而出现不同程度的下降,且欺骗距离越小,下降的趋势越明显。分析其原因可知,本文方法是基于径向速度量测与径向速度估计的差异来实现虚假目标的鉴别,当这种差异较为明显(速度偏差大于5 m/s)时,对于不同的欺骗距离,本文方法均能够实现有效鉴别;而对于速度偏差较小的情况(小于5 m/s),基于径向速度检验的方法效果有所下降,此时更多依靠的是目标位置信息的区分,当欺骗距离较大时,仍能保持较好的鉴别效果,而对于欺骗距离较小的情况,鉴别效果将出现下降,且随欺骗距离的减小,这种下降的趋势越明显。
5.2.3 雷达不同参数测量精度目标识别率分析
其他仿真条件不变,改变雷达不同参数测量精度:改变组网雷达的测距精度,使距离量测误差标准差由40 m均匀增大至320 m,得到本文方法与基于位置信息鉴别方法的真实目标正确识别率如图4a所示;改变组网雷达的测角精度,使角度量测误差标准差由0.06°均匀增大至0.3°,得到两种方法的真实目标正确识别率如图4b所示;改变雷达测速精度,使其从0.5 m/s均匀增大至8 m/s,得到本文方法真实目标正确识别率变化趋势如图5所示。


图4 雷达不同位置信息参数测量精度对真实目标正确识别率的影响Fig.4 Influence of radar different position information parameter accuracy on correct recognition rate
通过图4的仿真结果,并结合图2可得,当欺骗距离较小(1300 m)时,本文方法仍能够保持较高的正确识别率,而基于位置信息方法的识别率明显低于本文方法。根据前文的分析,当欺骗距离较小时,仅通过目标的位置信息已经较难实现有效鉴别,而本文方法在目标位置信息的基础上引入了径向速度信息,使目标量测增加了新的信息量,由此通过结合位置信息与径向速度信息保证了鉴别效果。
通过图5的仿真结果可以看出,当测速精度小于3.5 m/s时,本文方法能够保持较高的正确识别率,且识别率不随欺骗距离的变化而发生明显改变;而当雷达测速精度大于3.5 m/s时,识别率随欺骗距离的减小而逐渐下降。分析其原因可知,当欺骗距离较大时,通过位置信息即可实现真假目标的有效区分,因此识别率并不随测速精度的降低而发生明显变化;当虚假目标的密集程度增加时,根据前文的分析,此时的虚假目标鉴别主要通过目标径向速度信息的检验,因此当雷达测速精度降低时,鉴别效果也随之降低。
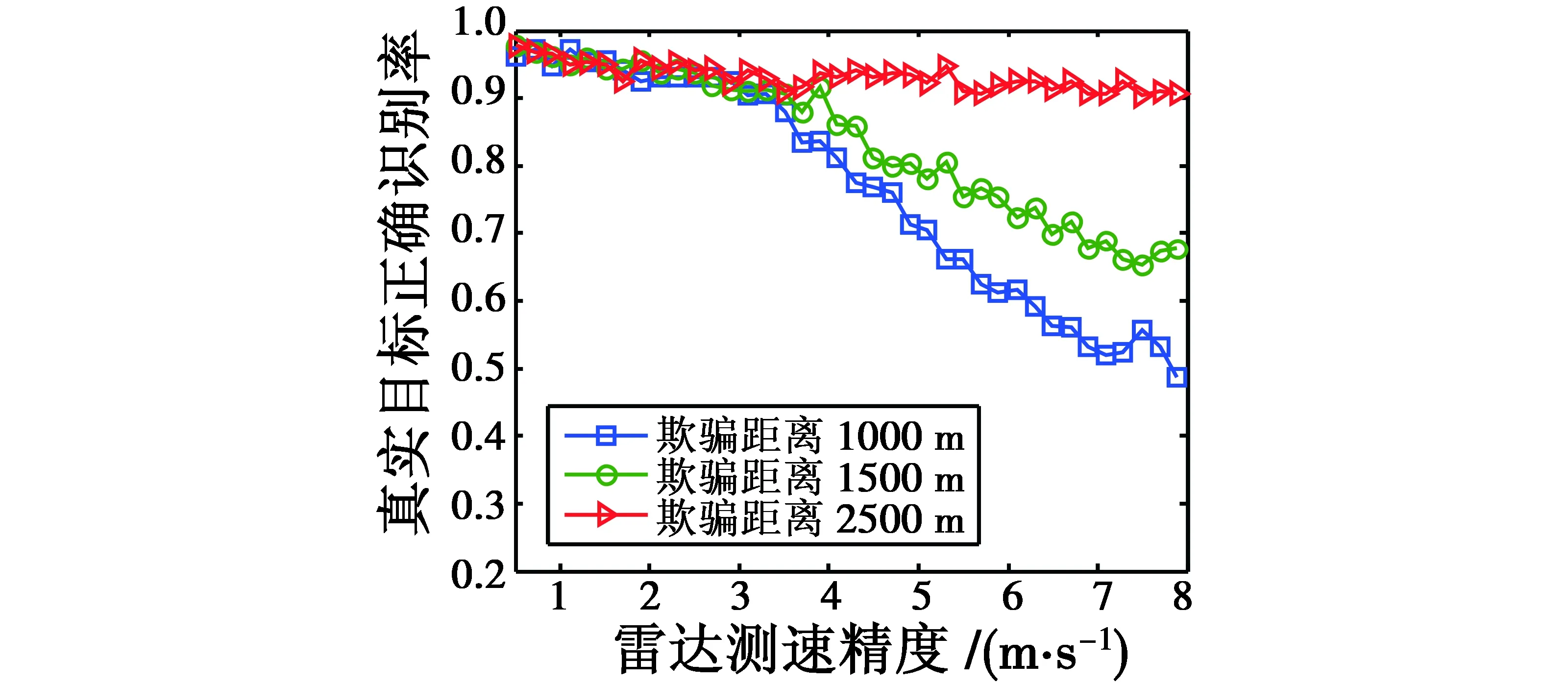
图5 雷达测速精度对真实目标正确识别率的影响Fig.5 Influence of radar radial velocity accuracy on correct recognition rate
5.3 本文方法跟踪效果分析
5.3.1 不同距离多假目标密集程度下的跟踪效果
假设其他仿真条件不变,由“不匹配”造成的速度偏差设为10 m/s,分别取欺骗距离为1000 m,1500 m和2500 m下对目标的跟踪位置误差进行分析,如图6所示。

图6 距离多假目标密集程度(欺骗距离)对目标位置跟踪误差的影响Fig.6 Influence of intensive degree of multi-range-false-target (deception range) on target position error
通过图6的仿真结果可以看出,本文方法对于真实目标的跟踪效果不随欺骗距离的变化而发生明显改变,其主要原因在于,欺骗距离的大小由真实目标携带的干扰机决定,从雷达自身角度而言,雷达各参数测量精度并不随欺骗距离的变化而改变,加之前文的分析,欺骗距离减小时,雷达网通过引入目标的径向速度信息能够弥补基于位置信息鉴别效果下降的不足,确保了真实目标的正确识别率,从而保证了跟踪效果的稳定性。
5.3.2 不同雷达参数测量精度下的跟踪效果
其他仿真条件不变,分别改变雷达不同参数的测量精度,得到雷达不同位置信息参数测量精度与不同测速精度下对目标的跟踪位置误差变化趋势,如图7和图8所示。


图7 雷达不同位置信息参数测量精度对目标位置跟踪误差的影响Fig.7 Influence of radar different position information parameter accuracy on target position error
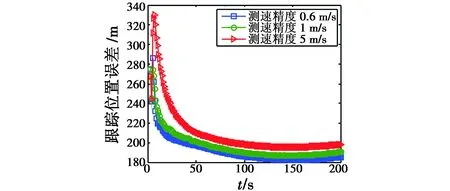
图8 雷达测速精度对目标位置跟踪误差的影响Fig.8 Influence of velocity accuracy on target position error
分析图7的仿真结果可知:一方面,基于位置信息的雷达测量精度的下降导致了跟踪位置误差增大;另一方面,在进行径向速度检验时,本文方法首先根据目标的位置信息估计出径向速度然后与径向速度量测进行检验,以此达到鉴别虚假目标的目的,而测距精度或测角精度的下降会造成估计出的径向速度信息误差增大,使得所估计出的径向速度误差因此增大,从而导致了跟踪误差的增大。分析图8可知,当雷达的测距精度与测角精度保持不变时,估计出的径向速度信息的误差保持稳定,而与之进行作差比较的径向速度量测的误差因测速精度的下降而增大,最终导致了目标跟踪误差的增大。
6 结束语
针对组网雷达在进行距离多假目标鉴别过程中,由于虚假目标密集程度增大导致鉴别效果变差的问题,本文提出了一种通过引入径向速度量测信息进行真假目标区分以保证鉴别效果的方法。仿真结果表明,当距离多假目标密集程度增大时,本文方法能够使真实目标正确鉴别率保持在90%以上,且不随欺骗距离的变化而发生明显变化;当雷达各参数测量精度发生变化时,本文方法仍能够实现对真实目标的识别与稳定跟踪。
[1] LIU H W,LIU H L,DAN X D,et al.Cooperative track initiation for distributed radar network based on target track information[J].IET Radar,Sonar & Navigation,2016,10(4):735-741.
[2] SHI C G,WANG F,ZHOU J J,et al.Resource management for target tracking in distributed radar network system[C]//IEEE International Conference on Signal Processing,Communications and Computing(ICSPCC),Ningbo, 2015:1-5.
[3] WEIB M.Group sparsity techniques for data fusion of a passive MISO radar network[C]//The 17th International Radar Symposium(IRS),Krakow,2016:1-5.
[4] DELIGIANNIS A,GOSSETTI G,PANOUI A,et al.Power allocation game between a radar network and multiple jammers[C]//IEEE Radar Conference,Philadelphia, 2016:1-5.
[5] XIONG W,ZHANG G,WEN F Q,et al.Trilinear decomposition-based spatial-polarisational filter method for deception jamming suppression of radar[J].IET Radar,Sonar & Navigation,2016,10(4):765-773.
[6] ELGAMEL S A.Using empirical mode decomposition and fractional Fourier transform-segment filtering algorithm to suppress high-power interference in non-linear chirp radars[J].IET Radar,Sonar & Navigation,2016,10(5):892-900.
[7] ZHANG Y B.Technology of smart noise jamming based on multiplication modulation[C]//Proceedings of the Conference on Electric Information and Control Engineering,Wuhan,2011:4557-4559.
[8] SHI X R,ZHOU F,ZHAO B,et al.Deception jamming method based on micro-Doppler effect for vehicle target[J].IET Radar,Sonar & Navigation,2016:10(6):1071-1079.
[9] ZHANG P.Realization of DRFM radar target simulator based on general instruments[C]//IET International Radar Conference,Hangzhou,2015:1-8.
[10] ALMSLMANY A,WANG C Y,CAO Q S.Advanced deceptive jamming model based on DRFM sub-Nyquist sampling[C]//Proceedings of 13th International Bhurban Conference on Applied Science and Technology (IBCAST),Islamabad,2016:727-730.
[11] XIE M,HUANG J Z,JIANG Y S,et al.Design and realization of DRFM system based on FPGA and DSP[C]//IET International Radar Conference,Hangzhou,2015:11-16.
[12] 罗兴旺,张伯彦,刘嘉,等.雷达数据处理中的杂波抑制方法[J].系统工程与电子技术,2016,38(1):36-44.
[13] ZHAO S S,LIU N,ZHANG L R,et al.Discrimination of deception targets in multistatic radar based on clustering analysis[J].IEEE Sensors Journal,2016,16(8):2500-2508.
[14] ZHANG S,YANG Y,CUI G L,et al.Range-velocity jamming suppression algorithm based on adaptive iterative filtering[C]//IEEE Radar Conference,Philadelphia, 2016:21-26.
[15] 孙殿星,王国宏,涂三军,等.基于雷达组网的低可观测目标跟踪技术研究[J].电光与控制,2016,23(4):6-10.
[16] 赵艳丽,王雪松,王国玉,等.多假目标欺骗干扰下组网雷达跟踪技术[J].电子学报,2007,35(3):454-458.
[17] 赵艳丽,陈永光,蒙洁,等.分布式组网雷达抗多假目标欺骗干扰处理方法[J].电光与控制,2011,18(3):25-30.
[18] 杨忠,王国宏,孙殿星,等.距离多假目标干扰下雷达网优化选择研究[J].电光与控制,2016,23(2):37-41.
[19] 张林让,赵珊珊,周宇,等.网络化雷达协同抗欺骗式干扰技术研究进展[J].数据采集与处理,2014,29(4):516-525.
[20] 赵珊珊,张林让,周宇,等.组网雷达点迹信息融合抗假目标干扰方法[J].电子科技大学学报,2014,43(2):207-211.
[21] 何友,修建娟,张晶炜,等.雷达数据处理及应用[M].3版.北京:电子工业出版社,2013.
DiscriminationofMulti-Range-False-TargetJammingforRadarNetworkBasedonRadialVelocityTesting
JI Zhe, WANG Guo-hong, ZHANG Xiang-yu
(Institute of Information Fusion Technology,Naval Aeronautical and Astronautical University,Yantai 264001,China)
Considering that the effect of the multi-range-false-target deception jamming discrimination becoming worse as the intensive degree of multi-range-false-target increases,we proposed a method based on radial velocity estimation of radar network to discriminate the false target.Firstly,benchmark radar was selected and measurements were classified into groups for preprocessing,and the target measurements of other radars were transformed into the coordinate system of the benchmark radar for measurements association,thus to eliminate the false measurements and clutter as well as decrease the amount of computation.Then,the radial velocity of target was estimated by using the position information after coordinate transformation,which was then tested with the benchmark radar radial velocity for discriminating the false targets.Simulation results verified that proposed method can achieve high correct discrimination rate,and track the true target stably.
radar network; multi-range-false-target deception jamming; coordinate transformation; position information; radial velocity testing
吉喆,王国宏,张翔宇.基于径向速度检验的雷达网距离多假目标鉴别[J].电光与控制,2017,24(7):17-22,27.JI Z,WANG G H,ZHANG X Y.Discrimination of multi-range-false-target jamming for radar network based on radial velocity testing[J].Electronics Optics & Control,2017,24(7):17-22,27.
TN957
A
10.3969/j.issn.1671-637X.2017.07.004
2016-07-26
2016-08-12
国家自然科学基金(61372027,61501489);“泰山学者”建设工程专项经费
吉 喆(1991 —),男,山东章丘人,硕士,研究方向为雷达抗干扰技术。复制、调制与转发,能够以较小的投入换取较好的干扰效果[12],因此,欺骗式干扰及其对抗技术[13-15]成为当前国内外专家研究的热点。
