3SFBQ-500型果园气爆松土注肥机的优化设计与试验
2018-01-09奚小波张瑞宏金亦富张剑峰
奚小波,张瑞宏,单 翔,金亦富,张剑峰
3SFBQ-500型果园气爆松土注肥机的优化设计与试验
奚小波1,2,张瑞宏1※,单 翔1,金亦富1,张剑峰1
(1. 扬州大学机械工程学院,扬州 225127; 2. 扬州大学水利与能源动力工程学院,扬州 225127)
针对目前果园开沟施肥存在的易伤树木根系、耕作能耗大、施肥不均等问题,该文研制了3SFBQ-500型果园气爆松土注肥机,采用液力辅助气铲激振的钻杆结构,建立液力辅助气铲钻土的力学模型及运动学方程,分析了钻杆的土力学关系,优化了钻头构型参数,优化后的钻头锥角60°、钻杆圆柱半径12.5 mm;设计了一种基于PLC控制的经济型多旋钮式开关操控系统,实现了机具手动、自动控制作业,一键操作可完成钻杆钻土、气爆松土、液肥注射、钻杆回升四步操作;在SolidWorks软件中建立了样机模型,并完成了样机的试制与田间试验工作。样机田间试验结果表明,气爆作用可在土体内部产生裂隙并扩散,300 mm钻深、0.8 MPa气爆压力下的土体最大裂隙宽约3~4 mm,裂隙扩展扰动半径约400 mm;土壤在气爆下发生扰动,扰动系数达50.11%;液肥在注肥机构作用下可在深土层中无堵塞喷射,并均匀扩散;样机操作简便,运行稳定,工作效率至少0.048 hm2/h,满足果园施液肥农艺要求,适用于果树、园林、绿化地的施肥作业。
优化;设计;农业机械;气爆松土;注肥;气铲激振;液力辅助;PLC
0 引 言
目前,果园种植业已成为中国农业种植的重要组成部分,据农业部统计数据显示[1],2016年中国的果园种植面积已达1 536.71万hm2,水果总产量为2.75亿t。在果园种植管理过程中,施肥作业至关重要,将会直接影响果实的品质及产量,且决定着果树发育生长的态势[2]。现有果树施肥机械中,开沟机械应用最为广泛,开沟施肥一般是用开沟机械先在果园行距间开出一条宽30 cm、深30~50 cm沟槽,然后再进行人工施肥及覆土[3]。经过多年的研究发展,果树开沟已历经了铧式犁开沟[4]、链刀式开沟[5]、旋耕开沟[6]、圆盘开沟[7]、螺旋开沟[8]等多种开沟形式的变化。近年来,具有开沟、施肥联合作业功能的机械得以研究与使用[9-12]。然而,开沟作业仍存在不足,表现为耕作阻力大、易伤树木根系,且肥料集中施加在沟槽内,扩散不均,不利于果树根系均衡吸收。
另外,果园地因常年不翻耕,土壤较板结,不利于天然降水的贮存,致使土内上下水气热得不到贯通,土壤毛细管破损,养分输送能力下降,土壤生物及有机质骤减,果树根系生长受阻[13-14]。因此,果园土壤深松十分必要,虽然开沟作业也有松土效果,但开沟幅宽小,对土壤扰动程度低,深松效果不明显。针对上述开沟施肥工艺的不足,国内学者开始将气爆作用引入深松施肥机械中,并做了相关研究工作。左胜甲[15]开展了气压深松特性研究,通过对耕地内部连续注入高压气体,对耕地实现了气压深松作业。李霞等[16]研制了一种气动深松施肥机,在深松铲柄及铲尖处添加通气孔,作业时利用空压机通入高压气,气流直通犁底层,达到疏松土壤、改善土壤孔隙度的目的,并能扩大深松区域。郑传刚等[17]研制了一种果园深层土壤输氧松土施肥机,该机型通过向深层土壤输送高压空气,完成向深部土壤输氧并松土,通过松土在土壤深层形成孔洞,供液态肥灌入,但该机型中的松土与施肥仍然是独立操控作业,效率较低。窦传峰[18]设计了一种果树深层松土施肥机,将高气压松土与注肥结合,利用高压气流冲击深层土壤,然后注液肥,但该机型仍为人工手持操作,自动化控制程度低,劳动负荷较大。
本文设计了一种果园气爆松土注肥机,采用液力辅助气铲激振结构,实现快速钻土及回升,采用PLC系统提高整机控制程度,减轻人工操作负担,提高机具作业效率,对机具的松土注肥效果进行了试验分析,并测试了机具的田间作业效率。
1 总体结构及工作原理
1.1 总体结构
3SFBQ-500型果园气爆松土注肥机主要由机架、空压机、液压站、液泵、电动推杆、液肥箱、储气罐、摆臂、气铲、液压杆、钻杆、悬挂架、动力输入装置等部件组成,图1为机具在SolidWorks软件中的三维模型结构。该机具的型号含义参照文献[19]:3—田间管理和植保机械代码,SF—施肥,BQ—爆气,500—最大施肥深度(mm)。机具通过悬挂架与拖拉机配套连接,整机动力由拖拉机动力输出轴经万向节传递与机具的动力输入装置连接;动力输入装置通过皮带连接空压机,驱动空压机工作,供气铲钻土及气爆松土使用;电动推杆由拖拉机电源驱动,并与摆臂连接构成摆杆机构,可无级快速调节施肥位置;摆臂上固连液压缸,液压活塞杆外端安有气铲,气铲下端固接钻杆,通过气铲激振并在液力辅助下实现钻杆的钻土及回升;施肥箱置于机架的后上端,由液泵完成液肥的注射,液泵通过皮带与机具动力输入装置连接。另外,机具中还包含空气、液肥管路,整机控制由PLC控制系统完成。
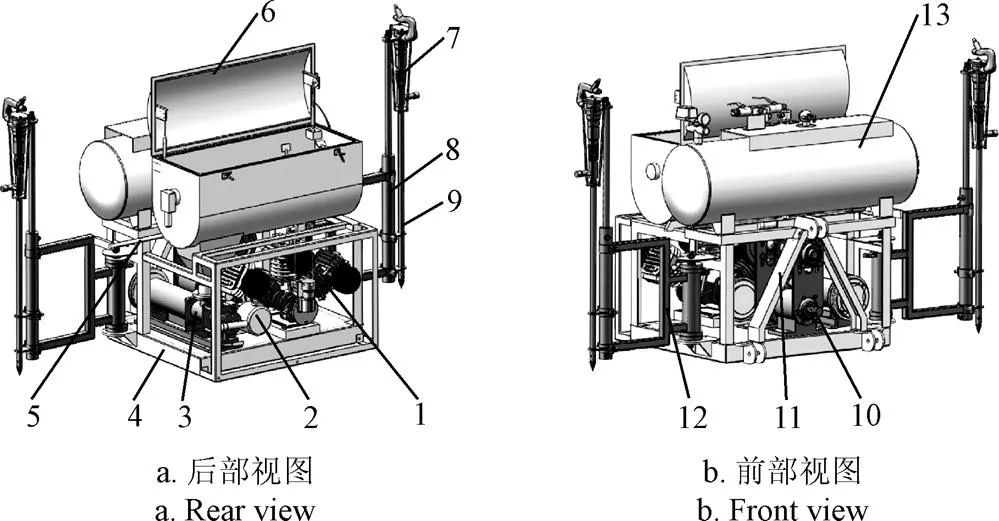
1.空压机 2.液压站 3.液泵 4.机架 5.电动推杆 6.液肥箱 7.气铲 8.液压杆 9.钻杆 10.动力输入装置 11.悬挂架 12.摆臂 13.储气罐
1.2 气液管路布置
图2为3SFBQ-500型果园气爆松土注肥机的气液管路布置图,机具左右两侧各有一个可独立控制的气爆松土注肥机构,机具中的气液管路由PLC控制电磁阀实现通断,2个松土注肥机构可单独作业亦可同步作业。
气路控制将储气罐中的高压气体经五通管分至左右两侧气铲与钻杆。电磁阀LV4、RV4分别安置在左、右气铲的气路上,机具需气铲激振钻土时,电磁阀开启,高压气注入,驱动气铲工作。电磁阀LV5、RV5分别安置在左、右钻杆的气路上,机具需要气爆松土时,电磁阀开启,高压气注入,完成松土。另外,钻杆回升时,在钻杆中通入气流,可减小回升阻力。在钻杆与电磁阀间的气路上设有单向阀,以防止液肥进入气管,起保护气路作用。
液路控制将液箱内的液肥通过液泵增压进行注射,液肥经四通管分至3个电磁阀管路,并在电磁阀的控制下实现液肥在箱内的循环及在土体中的注射。为防止粘度、浓度较大的液肥沉积造成液路堵塞,机具不注肥时,电磁阀V7开启,电磁阀LV6、RV6闭合,液肥通过液泵在箱内循环,且箱内设有搅拌装置,可将液肥充分搅匀。机具注肥时,电磁阀V7闭合,电磁阀LV6、RV6开启。
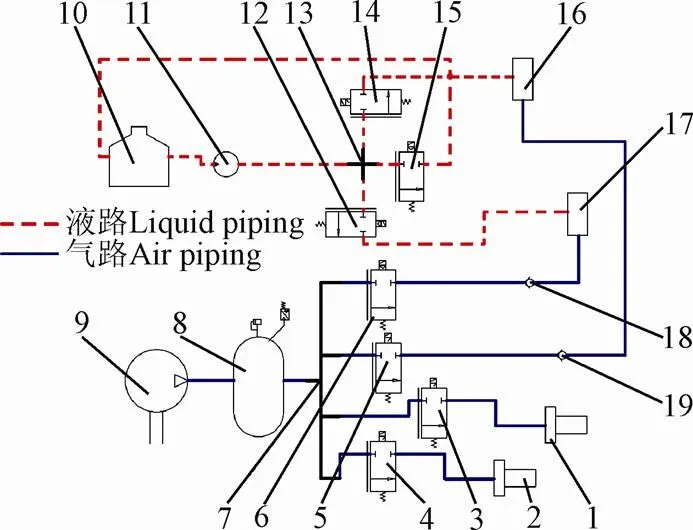
1.左气铲 2.右气铲 3.电磁阀LV4 4.电磁阀RV4 5.电磁阀LV5 6.电磁阀RV5 7.五通管 8.储气罐 9.空压机 10.液肥箱 11.液泵 12.电磁阀LV6 13.四通管 14.电磁阀RV6 15.电磁阀V7 16.左钻杆 17.右钻杆 18.单向阀1 19.单向阀2
1.3 工作原理及技术参数
3SFBQ-500型果园气爆松土注肥机工作时,首先启动空压机制得高压气,然后开启电动推杆将摆臂调至合适的施肥位置,接着开启气铲激振并在液力辅助下钻土(图3a);当钻杆达到施肥深度时进行气爆松土,并在土体内形成裂隙(图3b),裂隙可为液肥注射提供空间,并能促进土壤内部空气流动,利于根系生长;松土完毕后进行注液肥,液肥在液泵作用下均匀弥散于土壤裂隙中(图3c);注肥完成后,先通入稍许气流以减小钻杆与湿土体间的粘阻力,然后液压杆伸张使钻杆回升(图3d)。
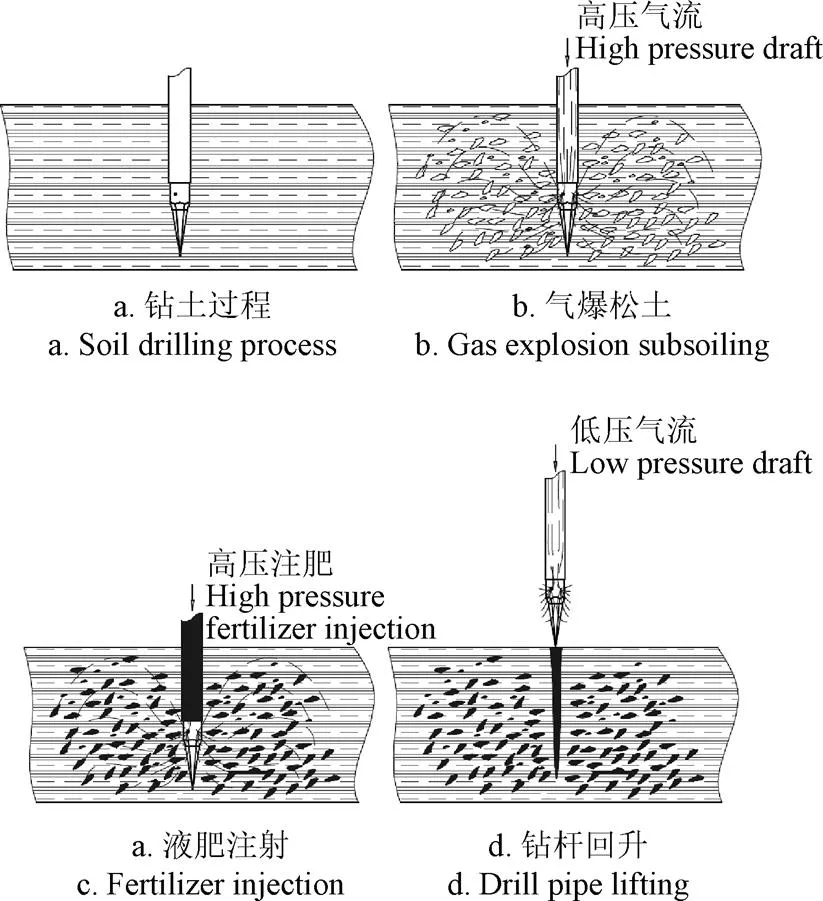
图3 3SFBQ-500型果园气爆松土注肥机工作过程示意图
针对目前果园低矮种植的农艺技术特点,设计确定的气爆松土注肥机主要技术参数如表1所示。
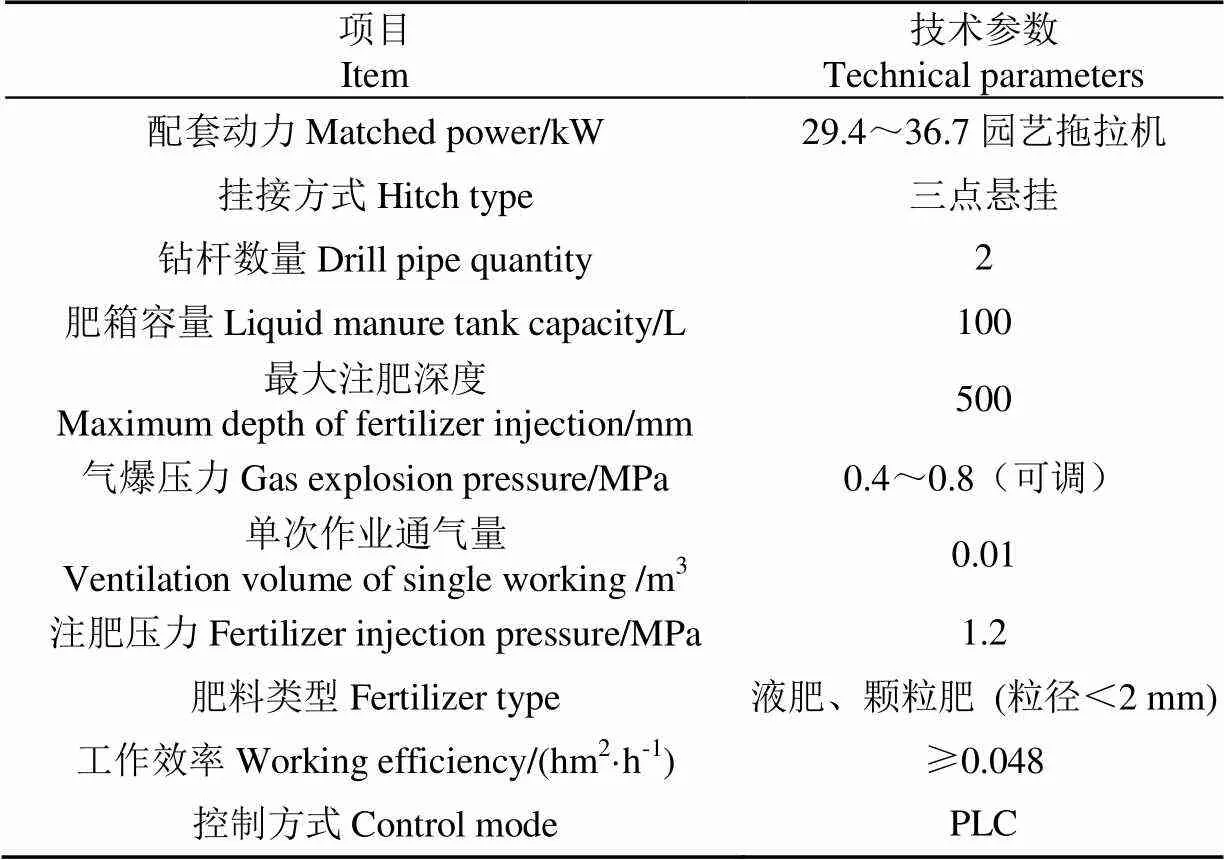
表1 3SFBQ-500型果园气爆松土注肥机主要技术参数
2 松土注肥机构设计
2.1 松土注肥机构组成及钻土力学分析
图4为松土注肥机构的结构示意图,其主要由摆臂、单活杆塞液压缸、气铲、钻杆等组成。液压缸固接在摆臂架上,气铲下端固接钻杆,气铲钻杆结构通过支架与活塞杆顶端固接,钻杆通过气铲激振及在液压力的辅助下完成钻土及回升。机构设计的最大钻土深度为500 mm,可满足绝大多数果树对施肥深度的要求。
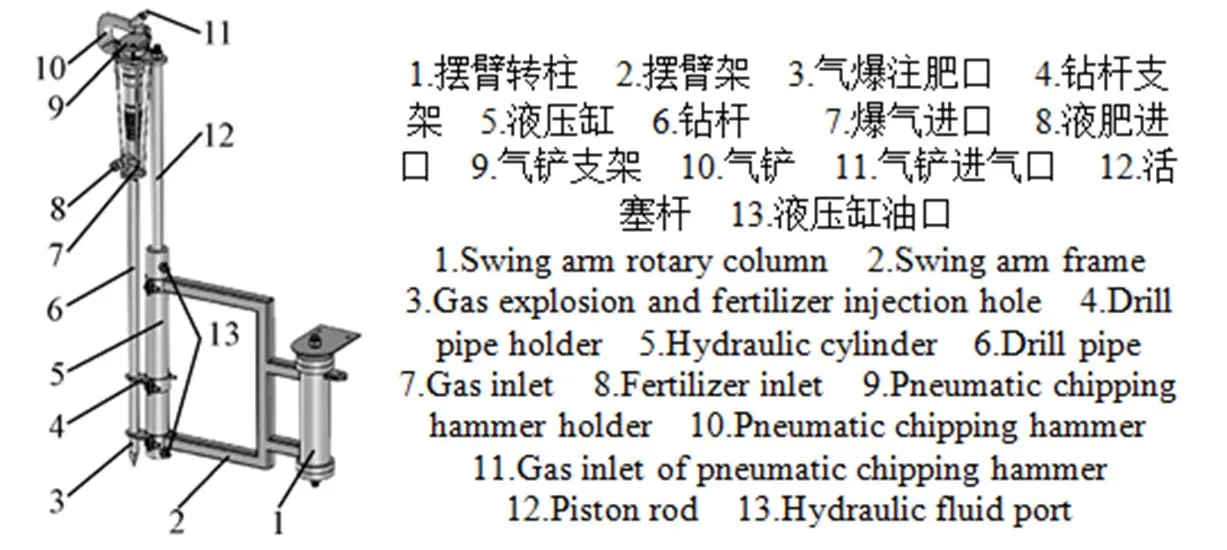
图4 松土注肥机构结构示意图
松土注肥机构钻土的受力情况如图5所示,其在系统外力(气铲激振力与液压杆助力)作用下克服土壤阻力钻土,所受土壤阻力包含2个部分,一是钻头锥面因土壤挤压形成的阻力,二是钻杆柱面因土壤挤压形成的阻力。
在距土面下深处的钻杆柱面上取微单元d,则该微单元的表面积d为
据朗金土压力理论[20],微单元d所受的正压力dp可表示为
式中0为静止土压力系数;为土壤重度,kN/m3。

注:pu为作用在钻头锥面的正压力,kPa;Fμ为作用在钻头锥面的摩擦力,kN;ps为作用在钻杆柱面的正压力,kPa;Fs为作用在钻杆柱面的摩擦力,kN;P为作用在钻杆上的总外力,kN;2α为钻头锥角,(°);R为钻杆圆柱半径,mm;h为钻土深度,mm;z为土面以下深度,mm。
则微单元s所受摩擦力的dF可表示为

式中为钻头与土壤的相对滑动摩擦系数。
所以钻杆柱面所受土壤摩擦力F可表示为

对于钻头锥面而言,其所受的土壤摩擦力F可表示为
对于钻头锥面所受的正压力p,其求解计算方法可参照文献[21],经计算,其可表示为
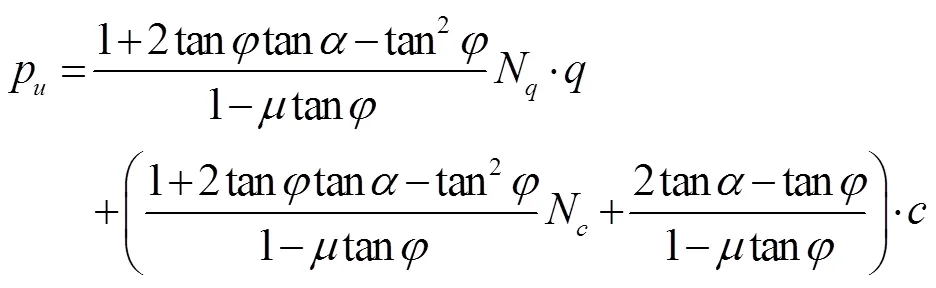

为使气爆松土注肥机可以克服所有阻力钻土,系统外力需满足以下条件

2.2 钻头构形参数优化
根据松土注肥机构钻土力学分析结果可知,钻杆所需的系统外力与钻头构型参数及钻深相关,特别是钻杆圆柱半径及钻头锥角2,为此需对钻头构型参数进行优化。根据实际情况,对涉及的钻杆及土壤参数进行拟定(表2)[22-23]。
将表1中的参数代入公式(7)后整理得



表2 钻杆及土壤参数
2.3 液力辅助气铲钻土动力学分析
根据机具工作原理,钻杆运动为单自由度系统的非线性受迫振动,建立液力辅助气铲钻土动力学模型如图6所示。
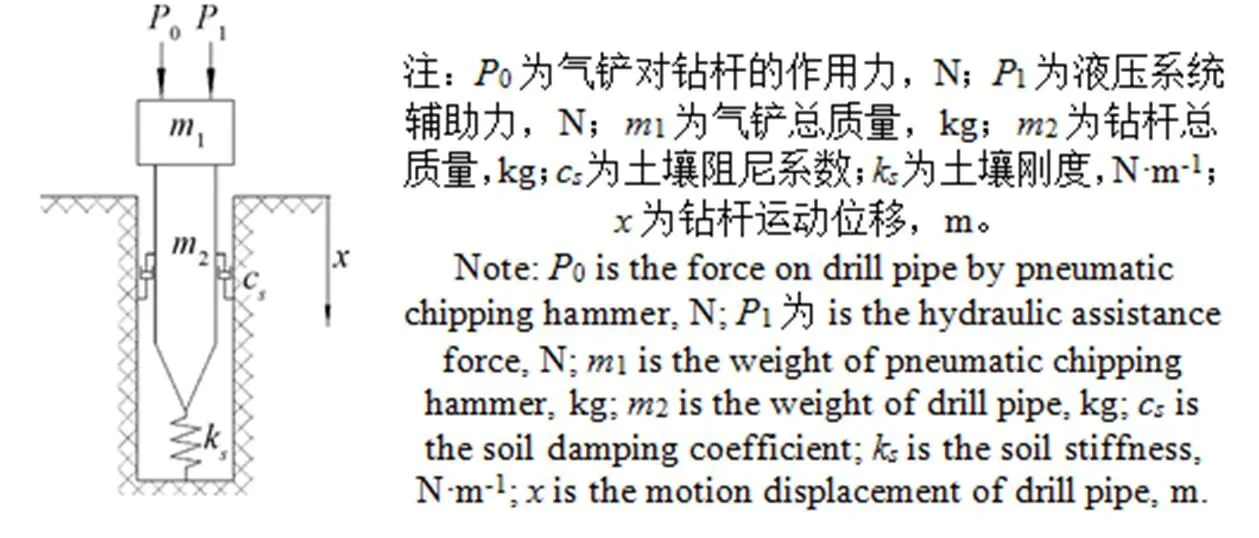
图6 液力辅助气铲钻土动力学模型
由达朗贝尔原理,系统在垂直方向的运动微分方程可表示为[24]


因此在有气铲的钻杆系统在垂直方向的运动微分方程可简化为
气铲对钻杆的作用力0,实为气铲后气室压力P作用在钻杆端面的力。韩帮军等[25]采用准稳态方法利用MATLAB对气铲气室压力作了研究,这里对其结论进行简化处理利用,则0可表示为

式中Pmax为气铲后气室峰值压力,为1.14倍的气铲工作进气压力,MPa;Pmin为气铲后气室谷值压力,为1个标准大气压力,MPa;为气铲冲击频率,Hz。
记1=(Pmax+Pmin)/2、2=(Pmax-Pmin)/2,则微分方程(11)可改写成

求得微分方程(13)的解为
由标准JB/T 8412-2016[26]可知,气铲的标准验收气压为0.63 MPa,则Pmax为0.72 MPa,1个标准大气压为0.10 MPa,则1为0.41 MPa、2为0.31 MPa。钻杆总质量2约2.43 kg。依据标准中各型气铲技术参数,求得各型气铲的钻杆系统在液力辅助下的冲击行程如表3所示。由表3可知,C7型气铲的冲击行程为100.04 mm,显著大于其他型气铲,且其冲击频率低,运动稳定;同时C7型气铲冲击能也最大,利于深层钻土。故选取C7型气铲作为钻杆激振器。另外,气铲的使用对松土注肥机构也有保护作用,作业中遇及小的砖石,气铲可将其冲击碎,若遇及大砖石,气铲的减震弹簧可缓解冲击力,操作者发现钻杆难以下钻时,可重新更换作业位置。
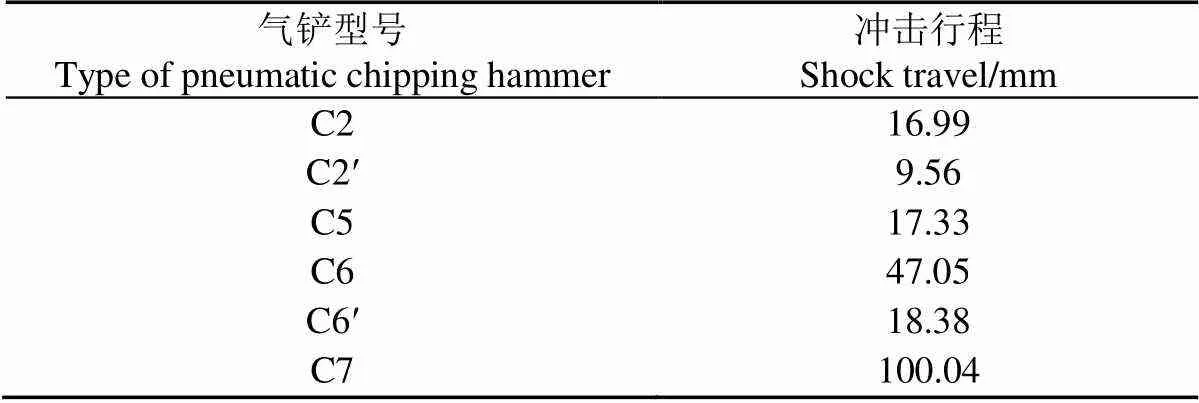
表3 松土注肥机构的气铲类型及其对应的冲击行程
该松土注肥机构通过钻杆挤压土层深钻,在土体中气爆松土并注肥,该工艺与传统开沟、深松、施肥、覆土工艺相比,具有耕作阻力小、作业能耗小、施肥均匀、不破坏土层结构、不伤树木根系等优势。
3 PLC控制系统设计
3.1 系统组成
PLC控制系统包含硬件系统及软件系统。硬件系统主要是电磁阀、电动推杆、控制器等。考虑到农业机械的经济性,为降低机具生产成本,系统控制操作终端采用旋钮式控制终端。根据机具工作原理,PLC控制器选用14输入/10输出的西门子CPU224(6ES7 214-1BD2323-0XB0),再配合使用4输入/4输出西门子EM223(6ES7 223-1BF22-0XA0)扩展模块,以满足18输入/13输出的接线需要。电磁阀选用2W-15DC型,额定电压12 V,最大压力1.0 MPa,可满足气液通断的控制要求。为实现左右摆臂伸张与缩回的往复动作,电动推杆行程300 mm,最大推力400 N,系统选用迅驰CNXCI XC800A型电动推杆,其参数为:额定电压DC 12 V,最大行程300 mm,额定速度48 mm/s,额定扭矩2 N·m,额定转速100 r/min,额定功率60 W,最大推力400 N。系统硬件配置如表4所示。
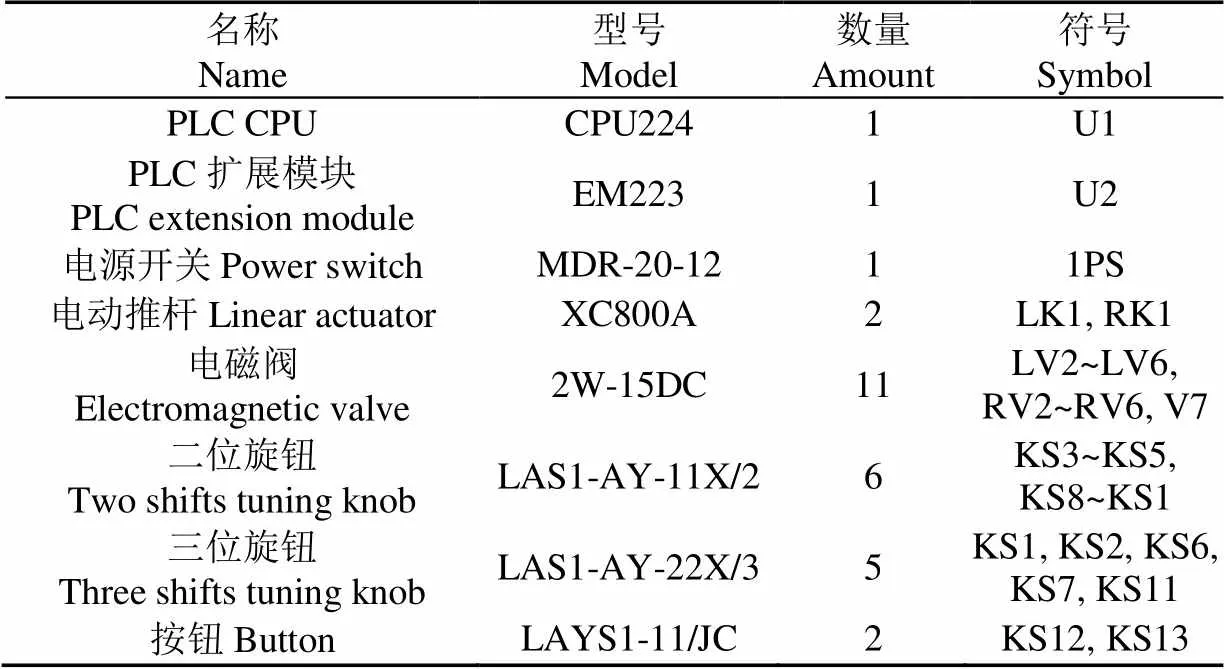
表4 3SFBQ-500型果园气爆松土注肥机控制系统硬件配置
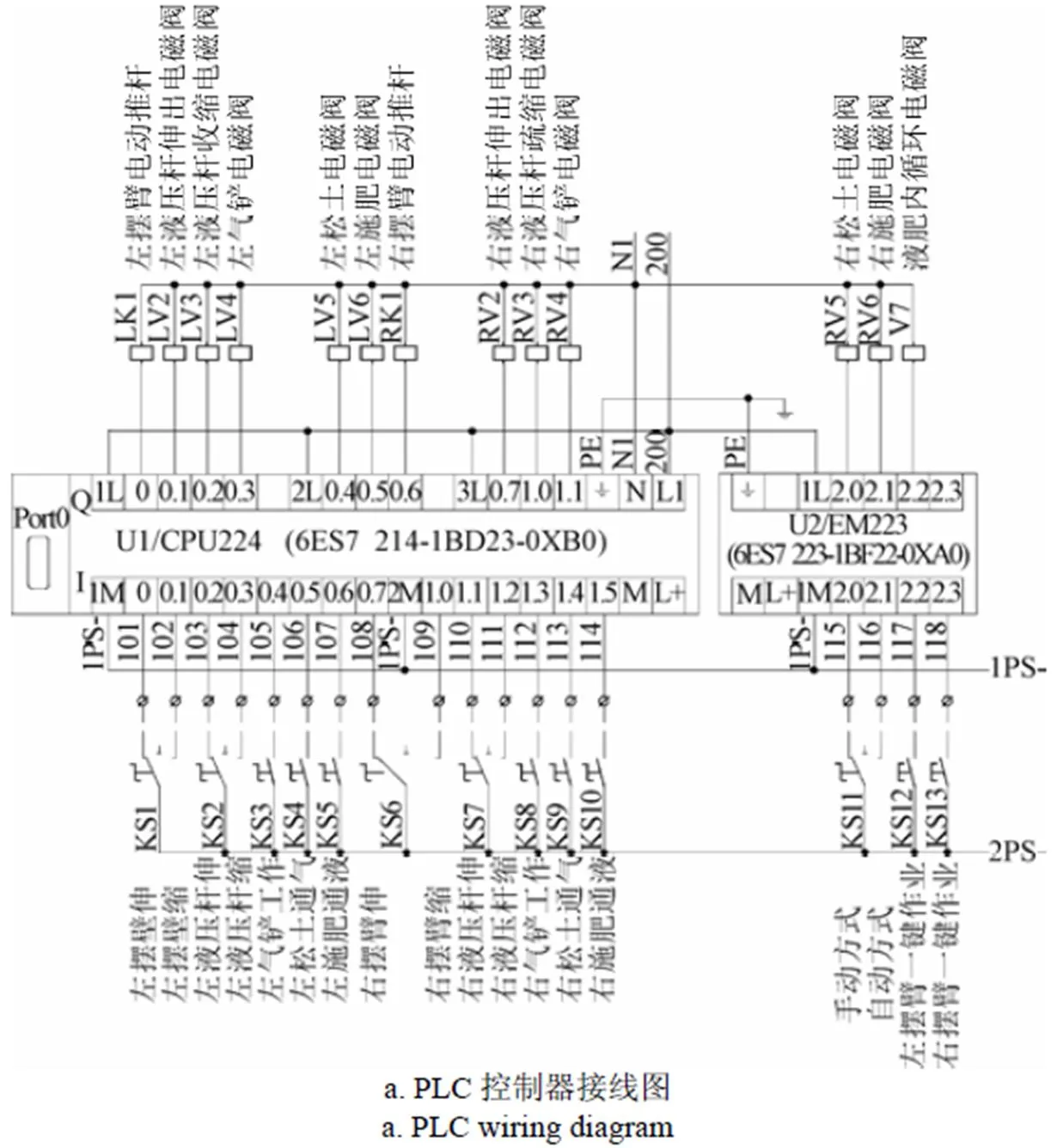
PLC控制器接线如图7a所示,为多旋钮开关控制设计,为方便用户使用及样机试验调试,该控制系统设置了手动与自动控制方式自由切换功能。手动方式下,需用户根据实际作业流程自行调整功能部件的工作状态,该方式可方便用户及时调整方案;自动方式下,用户可根据实际作业需要进行左右摆臂的一键式自动化作业,一键操作完成钻土、气爆松土、液肥注射、钻杆回升四步操作,简单快捷。系统控制柜面板如图7b所示。
3.2 控制程序设计
在西门子STEP 7 Micro-WIN操作平台上进行PLC程序开发,采用梯形图编程语言,系统控制程序流程如图8所示。该控制系统的主要功能是对气液管路及液压油路上的电磁阀进行开闭控制,从而实现对气路、液路中流体的通断控制,以及液压杆伸缩运动的控制,并按照机具工作原理中的作业流程执行,从而完成气爆松土液肥注射作业任务。

图8 3SFBQ-500型果园气爆松土注肥机控制程序流程图
4 田间试验
4.1 试验过程
为适应气爆松土注肥机在果园间行驶便捷,动力系统选用底盘低、宽度小的黄海金马404D型园艺拖拉机,配套动力29.4 kW。空压机选用罗翔W-1.0/8型,排气量1 m3/min,满载气压0.8 MPa,并在空压机出气口后装220 mm×300 mm储气罐,单次松土通气量为0.01 m3,爆气气压0.4~0.8 MPa可调(低于0.4 MPa,土体几乎无扰动)。液泵选用G25-2型单螺杆泵,额定转速960 r/min,额定压力1.2 MPa,额定流量2 m3/h(即0.56 L/s),允许颗粒直径2 mm。试验样机如图9所示。

图9 3SFBQ-500型果园气爆松土注肥机试验样机
试验在扬州市江都区七里镇进行,试验时间为2017年8月28日,试验地为标准化种植梨园,行距4 m,株距3 m,最低枝杈高约1.4 m。试验地土壤紧平均硬度4.35 MPa,土壤含水量13.5%,室外温度32 ℃。根据当地农户对梨园施肥作业要求,对其进行松土注肥作业,肥料采用有机颗粒肥料,粒径0.8~1.5 mm,配水混合使用,肥水浓度350 g/L,注肥深度50 cm,单次注肥量1 L,单棵树注肥2次,分2行注射。试验对气爆松土后的土体内部变化、土壤扰动系数及土内注肥效果进行了分析,并对机具的工作效率进行了测试。
4.2 试验结果
试验气爆深度为300 mm,为直接观察气爆后土体内部发生的变化情况,采用1 200 mm×1 000 mm×3 mm钢性插板(图10a)对土体进行横截处理,并将钢板一侧土体剖除,露出土体截面形貌,如图10b所示。气爆后的土体内部发生了裂隙,由于该梨园地长年不翻耕,土体较板结,气爆后的土体最大裂隙宽度约3~4 mm。同时,裂隙从气爆中心沿径向向外扩展,裂隙扩展扰动半径约400 mm;另外在纵向上,气爆作用也使得土体向上抬升,说明气爆后气流会将从土表往外渗漏,从而起到对土体的扰动疏松作用,达到深松土壤的目的。

图10 气爆松土后土体的横截处理及截面形貌
根据Murdoch L C等的土体气力劈裂裂隙扩展模型(图11a),气爆土体裂隙扩展有如下方程关系[27]
式中()为距气爆中心处的裂隙宽度,mm;为气爆中心处的裂隙宽度,mm;R为裂隙半径,400 mm;为气爆压力,0.8 MPa;为气爆深度,300 mm;为土体弹性模量,紧砂土为80 MPa。
注:为气爆中心处的裂隙宽度,mm;为裂隙扩展距气爆中心的距离,mm;()为距气爆中心处的裂隙宽度,mm;R为裂隙半径,mm;为气爆深度,mm。
Note:is the width of soil fracture at the gas explosion centre, mm;is the distance from the gas explosion center, mm;() is the width of soil fracture atdistance from the gas explosion center, mm;Ris the radius of soil fracture, mm;is the gas explosion depth, mm.
图11 气爆松土的裂隙扩展模型及土体扰动示意图
Fig.11 Soil fracture extension model and soil perturbation diagram by gas explosion subsoiling
根据公式(15)求得气爆中心处的理论裂隙宽度为3.6 mm,这与实际最大裂宽度相符。对于气爆后土体扰动特性,可借鉴铲式深松后的土壤扰动分析方法,采用土壤扰动系数表示[28],则有
式中为深松前地表线与实际深松地底线间的土方,m3;为深松前地表线与理论深松地底线间的土方,m3。
根据Murdoch L C理论模型,高压气流在喷口中心使土体沿径向劈裂,并向外辐射,形成以最大劈裂半径R为半径的球体扰动区(图11b),因此公式(16)可写成
将R=0.4 m,=0.3 m代入上式求得土壤扰动系数为50.11%。一般传统铲式深松作业后的土壤扰动系数约为45%[29],因此采用气爆松土工艺对土壤的扰动效果好,且不破坏土层结构,对树木根系伤害小,利于根系生长。
试验在剖面注射孔向外平移10 cm继续钻孔深至500 mm并注肥(图12),以观测高压作用下的液态有机肥在土体中的扩散情况,从图中飞溅的液珠可以看出,在1.2 MPa的液力条件下,液肥在500 mm深土层中可从注射机构中无堵塞地在土内扩散,且扩散均匀,能满足果园液肥注射的作业要求。

图12 高压注液肥效果
试验在梨园地进行,机具在梨园行距中间行驶作业,根据树根生长特点,松土注肥点位于行距内两树连线上距离树桩约1 m处,在完成一行距的作业后,机具转至邻行继续作业,这样每棵树的松土施肥点为2个,以确保施肥的均匀性。机具作业时,左、右松土注肥机构同时工作,记两机构同时完成钻土、松土、注肥、回杆四步工序为一组试验。经统计,在施肥深度50 cm、单机构注肥量1 L/次的情况下,机具完成30组试验所需时间为30 min,其中,机具完成四步工序约50 s/次,拖拉机启停约10 s/次。经计算,上述条件下的机具工作效率为0.048 hm2/h。根据施肥工艺的不同,机具工作效率也不同,若单颗树仅需一个施肥点或施肥深度小于50 cm,其工作效率将提高,所以本机具的作业效率至少0.048 hm2/h。
5 结 论
1)本文所设计的3SFBQ-500型果园气爆松土注肥机,实现了果园松土、注肥联合作业,满足果园种植农艺要求。改变传统先开沟、后倒肥、再覆土的作业方式,机具松土、注肥一次作业,使果园常年不翻耕的板土得到深松,增加土壤透气性,降低土层结构破坏的程度,对树木根系无伤害,注肥无堵塞,扩散均匀,利于果树生长。
2)提出气爆松土注肥的作业方式,采用液力辅助气铲激振的钻杆结构,实现钻杆的快速钻土及回升。建立了液力辅助气铲钻土的力学模型,优化了钻头构型参数及气铲选型,优化后的钻头锥角为60°、钻杆圆柱半径为12.5 mm、气铲选用C7型。优化结果为钻土机构的设计提供了参考。
3)机具采用基于PLC控制的多旋钮开关操作系统,实现了机具的手动、自动控制作业,一键操作可完成钻杆钻土、气爆松土、液肥注射、钻杆回升四步操作,简单快捷,机具作业效率至少0.048 hm2/h。
4)气爆作用在土体内产生裂隙并扩散,300 mm钻深、0.8 MPa气爆压力下的土体最大裂隙宽约3~4 mm,裂隙扩展扰动半径约400 mm,土壤在气爆下发生扰动,扰动系数达50.11%,优于铲式深松,深松效果显著。
[1] 农业部. 2016年我国水果行业产量、消费量以及供需平衡表预测[EB/OL]. 2016-09-16[2016-09-16]. http://www. chinaidr.com/news/2016-09/103777.html.
[2] Sanders K F. Orange harvesting systems review[J]. Biosystems Engineering, 2005, 90(2): 115-125.
[3] 刘彪,肖宏儒,宋志禹,等. 果园施肥机械现状及发展趋势[J]. 农机化研究,2017,39(11):263-268.
Liu Biao, Xiao Hongru, Song Zhiyu, et al. Present state and trends of fertilizing machine in orchard[J]. Journal of Agricultural Mechanization Research, 2017, 39(11): 263-268. (in Chinese with English abstract)
[4] 王旭东,邱立春,王瑞丽,等. 1LQ-40型开沟扶垄犁性能试验研究[J]. 农机化研究,2010,32(7):170-172.
Wang Xudong, Qiu Lichun, Wang Ruili, et al. The performance of 1LQ-40 ditch and furrow plough test and research[J]. Journal of Agricultural Mechanization Research, 2010, 32(7): 170-172. (in Chinese with English abstract)
[5] 刘迎春,杨有刚. 链刀前置后倾式开沟机的平衡理论[J]. 农业机械学报,2005,36(10):70-72.
Liu Yingchun, Yang Yougang. Equilibrium theory of chain ditcher with sloping from ahead to behind and preceding cutter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(10): 70-72. (in Chinese with English abstract)
[6] 叶强,谢方平,孙松林,等. 葡萄园反转双旋耕轮开沟机的研制[J]. 农业工程学报,2013,29(3):9-15.
Ye Qiang, Xie Fangping, Sun Songlin, et al. Development of vineyard ditcher with reversal twin rotary tillage wheels[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(3): 9-15. (in Chinese with English abstract)
[7] 康建明,李树君,杨学军,等. 圆盘式开沟机作业功耗分析及试验验证[J]. 农业工程学报,2016,32(13):8-15.
Kang Jianming, Li Shujun, Yang Xuejun, et al. Experimental verification and simulation analysis on power consumption of disc type ditcher[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(13): 8-15. (in Chinese with English abstract)
[8] 张泉泉,李萍萍,朱长顺,等. 立式螺旋开沟器土槽试验装置[J]. 排灌机械工程学报,2014,32(8):725-729.
Zhang Quanquan, Li Pingping, Zhu Changshun, et al. Soil-bin test device of vertical spiral opener[J]. Journal of Drainage and Irrigation Machinery Engineering, 2014, 32(8): 725-729. (in Chinese with English abstract)
[9] 肖宏儒,赵映,丁文芹,等. 1KS60-35X型果园双螺旋开沟施肥机刀轴设计与试验[J]. 农业工程学报,2017,33(10):32-39.
Xiao Hongru, Zhao Ying, Ding Wenqin, et al. Design and experiment on blade shaft of 1KS60-35X type orchard double-helix trenching and fertilization machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 32-39. (in Chinese with English abstract)
[10] 马晨,蒙贺伟,坎杂,等. 果园有机肥深施圆盘开沟机研究现状及发展对策[J]. 农机化研究,2017,39(10):12-17.
Ma Chen, Meng Hewei, Kan Za, et al. The research current situation and development countermeasure of the orchard organic fertilizer deep application of disc ditching machine[J]. Journal of Agricultural Mechanization Research, 2017, 39(10): 12-17. (in Chinese with English abstract)
[11] 刘双喜,张宏建,王金星,等. 果园开沟施肥机导肥机构的优化设计[J]. 中国农机化学报,2017,38(7):45-53.
Liu Shuangxi, Zhang Hongjian, Wang Jinxing, et al. Optimization design of fertilizer-guiding mechanism for orchard ditching and fertilizing machine[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(7): 45-53. (in Chinese with English abstract)
[12] 康建明,李树君,杨学军,等. 密植果园开沟施肥机开沟刀片设计与试验[J]. 农业机械学报,2017,48(2):68-74.
Kang Jianming, Li Shujun, Yang Xuejun, et al. Design and experiment of ditching blade installed in close planting orchard ditching machinery[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2): 68-74. (in Chinese with English abstract)
[13] 高茂盛,薛少平,廖允成,等. 手扶拖拉机专用深松机果园试验[J]. 农业机械学报,2010,41(10):35-39,62.
Gao Maosheng, Xue Shaoping, Liao Yuncheng, et al. Experiment of subsoiling technique in apple orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 35-39, 62. (in Chinese with English abstract)
[14] 高茂盛,温晓霞,黄金辉,等. 耕作方式和秸秆覆盖对渭北苹果园土壤保蓄水性能及酶活性的影响[J]. 中国农业大学学报,2009,14(4):91-97.
Gao Maosheng, Wen Xiaoxia, Huang Jinhui, et al. Effect of stubble mulch and tillage managements on apple orchard soil moisture reserves and soil enzyme activity in the Weibei Plateau[J]. Journal of China Agricultural University, 2009, 14(4): 91-97. (in Chinese with English abstract)
[15] 左胜甲. 气压深松特性及技术的试验研究[D]. 哈尔滨:东北农业大学,2016.
Zuo Shengjia. Experimental Study on the Characteristic and Technology of Air-pressure Subsoiling[D]. Harbin: Northeast Agricultural University, 2016. (in Chinese with English abstract)
[16] 李霞,汤明军,王维新,等. 气动深松施肥机:201521057267.0[P]. 2016-05-18.
[17] 郑传刚,王志民. 一种果园深层土壤输氧松土施肥机及其使用方法:201510392179.4[P]. 2015-07-03.
[18] 窦传峰. 一种深层松土施肥机:201120276900.0[P]. 2012-03-28.
[19] 中华人民共和国工业和信息化部. 农机具产品型号编制规则:JB/T 8574-2013[S]. 北京:机械工业出版社,2013.
[20] 袁聚云,钱建国,张宏鸣,等. 土质学与土力学[M]. 北京:人民交通出版社,2001.
[21] 刘杰. 冲击式月壤剖面贯入器潜入负载特性研究[D]. 哈尔滨:哈尔滨工业大学,2016.
Liu Jie. Research on Penetrating Load Characteristics of Hammer-driven Penetrator for Lunar Exploration[D]. Harbin: Harbin Institute of Technology, 2016. (in Chinese withEnglish abstract)
[22] 余友泰,蒋建鹏. 土壤、作物种实和各种脱出物对钢板、铸铁、和木板等的摩擦系数的测定[J]. 东北农学院学报,1957(1):1-11.
[23] 孙晓东,王丹. 土的粘聚力取值分析[J]. 辽宁建材,2010(3):39-41.
[24] 张义民. 机械振动[M]. 北京:清华大学出版社,2007.
[25] 韩帮军,季馨. 基于MATLAB的风镐气室压力信号的计算机仿真[J]. 电子机械工程,2001,16(3):33-36.
Han Bangjun, Ji Xin. The computer simulation of the gas cabinet pressure of the air pick based on MATLAB[J]. Electro-Mechanical Engineering, 2001, 16(3): 33-36. (in Chinese withEnglish abstract)
[26] 中华人民共和国工业和信息化部. 气铲: JB/T 8412-2016[S]. 北京:机械工业出版社,2016.
[27] Murdoch L C, Slack W W. Forms of hydraulic fractures in shallow fine-grained formations[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2002, 128(6): 479-487.
[28] 中华人民共和国工业和信息化部. 深松整地联合作业机:JB/T 10295-2014[S]. 北京:机械工业出版社,2014.
[29] 陈兴和,孙超,刘辉. 深松机主要作业质量测试方法对比[J]. 农业工程,2017,7(2):9-13.
Chen Xinghe, Sun Chao, Liu Hui. Comparative of main operation quality test methods for deep loosening machine[J]. Agricultural Engineering, 2017, 7(2): 9-13. (in Chinese withEnglish abstract)
Optimal design and experiment of 3SFBQ-500 type orchard gas explosion subsoiling and fertilizer injection machine
Xi Xiaobo1,2, Zhang Ruihong1※, Shan Xiang1, Jin Yifu1,Zhang Jianfeng1
(1.225127,; 2.,225127,)
At present in the orchard fertilization process, the most widely used method is ditching and fertilizing method. However, orchard ditching and fertilizing technology has a series of problems, such as easy damage to tree roots, high energy consumption and uneven fertilizing. Meanwhile, soil compaction frequently exists in orchard land due to no farming in long years, which is not beneficial for rainwater leakage and nutrient transport in soil, so there is a great need to develop a new kind of fertilization machine. In this context, a 3SFBQ-500 type gas explosion subsoiling and fertilizer injection machine was designed, which used high pressure gas to shock soil body and then injected fertilizer. The drill pipe mechanism with pneumatic chipping hammer excitation and hydraulic assistance was designed to drill the soil, and the maximum drilling depth reached 500 mm. The dynamical model and kinematical equation of soil drilling by pneumatic chipping hammer with hydraulic assistance were established, and force analysis of drill pipe during soil drilling process was performed. The drill bit structure parameters were optimized as taper angle of 60° and pipe radius of 12.5 mm. An economical multi-knob switch control system was made to improve the equipment automation degree and reduce the intensity of labor operations, which could make the machine operations controlled manually and automatically. The working processes of soil drilling, gas explosion subsoiling, liquid fertilizer injection and drill pipe rebound were completed in a key operation. Then the 3D (three-dimensional) model of the whole machine was established using SolidWorks software. On this foundation, the machine prototype was produced. Afterwards, field experiments were carried out, and the results showed that soil fractures were created by gas explosion. Under the condition of 0.8 MPa gas pressure and 300 mm drilling depth, the maximum breadth of fractures was about 3-4 mm, the extension disturbance radius of fractures about 400 mm. In addition, the soil perturbation happened after gas explosion, and the soil perturbation coefficient was 50.11%, which was calculated by gas-splitting soil fracture extension model of Murdoch L C. What was more, the liquid fertilizer was sprayed in deep soil with no stoppage and diffused uniformly in the role of high pressure pump. This new designed machine abandoned the traditional operation mode of first ditching, then fertilization, and then covering the soil, while adopted the new operation mode of gas explosion subsoiling and fertilizer injection. So the tree roots were not easily damaged and the fertilizer was evenly distributed, which was conducive to nutrient absorption of root in growth. The work efficiency was 0.048 hm2/h at least. What’s more, with simple operation and stable performance, the new designed machine can meet the agronomic requirements of orchard, garden and city greening fertilization.
optimization; design; agricultural machinery; gas explosion subsoiling; fertigation; pneumatic chipping hammer exciting; hydraulic boosting; PLC
10.11975/j.issn.1002-6819.2017.24.005
S224
A
1002-6819(2017)-24-0035-09
2017-09-08
2017-11-01
国家重点研发计划(2016YFD0700903),江苏省农机三新工程项目(NJ2017-11)
奚小波,男,江苏大丰人,博士生,主要从事农业机械设计与制造研究。Email:xxbctg@126.com
张瑞宏,男,江苏江都人,教授,博导,主要从事农业工程及装备研究。Email:zhang-rh@163.com
奚小波,张瑞宏,单 翔,金亦富,张剑峰. 3SFBQ-500型果园气爆松土注肥机的优化设计与试验[J]. 农业工程学报,2017,33(24):35-43. doi:10.11975/j.issn.1002-6819.2017.24.005 http://www.tcsae.org
Xi Xiaobo, Zhang Ruihong, Shan Xiang, Jin Yifu, Zhang Jianfeng. Optimal design and experiment of 3SFBQ-500 type orchard gas explosion subsoiling and fertilizer injection machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 35-43. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.24.005 http://www.tcsae.org
