车辆电子稳定性试验中A值计算方法的研究[1]
2018-01-08曹建永张建文
文/曹建永 张建文 曹 寅
车辆电子稳定性试验中A值计算方法的研究[1]
文/曹建永 张建文 曹 寅
A值是车辆电子稳定性系统测试中最重要的测量值之一。A值在不同的测试标准中有不同的计算方法,测试值都会受到车辆速度和驾驶员的影响。本文采用试验辨识方法对车辆进行性能辨识,得到车辆在车速为80 km/h的频响函数,通过对频响函数求逆得到稳态侧向加速度为0.3 g所对应的方向盘转角输入A值,避免了试验误差。实例验证表明,计算值与实测值一致性较好。
系统辨识 车辆模型 试验误差 ESC试验
由于汽车行驶过程中运动学和动力学的特性十分复杂,受驾驶员的测试水平、测试速度、轮胎和道路情况等多方面的影响,有很多关键性的汽车状态参数都无法准确、可靠地进行测量;同时,现有的车载传感器也存在着标定误差和漂移误差等,大多情况下无法确定其测量噪声的分布特性,这对汽车状态信息的测量,特别是车辆电子稳定性试验中A值的准确测量带来很大的困难。本文通过试验辨识方法得到车辆的频响函数,对频响函数进行分析得到理想的A值。
一、国际上不同A值的计算方法比对
车辆电子稳定系统试验可分为3个阶段,首先是试验准备阶段,主要是通过制动试验使制动衬片和轮胎达到试验要求;其次,是慢增量试验阶段,其目的是得到A值,A值是使汽车产生某一侧向加速度时的方向盘转角;最后,进行正弦延迟试验。A值是车辆电子稳定系统试验的前提条件,为了能得到A值,FMVSS 126《电子稳定控制系统》和ECE R13H:2007《关于乘用车制动认证的统一规定》分别对A值的测量方法进行了说明。表1为美国标准和欧洲标准中A值计算方法的对比。

表1 FMVSS和ECE标准中A值计算方法的对比
上述方法都是利用多次试验进行拟合从而计算出A值,由于试验条件的差异性,特别是速度的控制上,速度对侧向加速度有着很重要的影响,每次试验难以保证速度恒定在80 km/h,从而会对A值的计算造成一定的误差。
同时,上述试验在A值计算过程中对场地有着较高的要求,场地大小需要半径为300 m的圆周,面积较小的场地车辆就可能有冲出去的危险。如图1和图2所示FMVSS 126和ECE R13在实际场地中的轨迹对比图1:
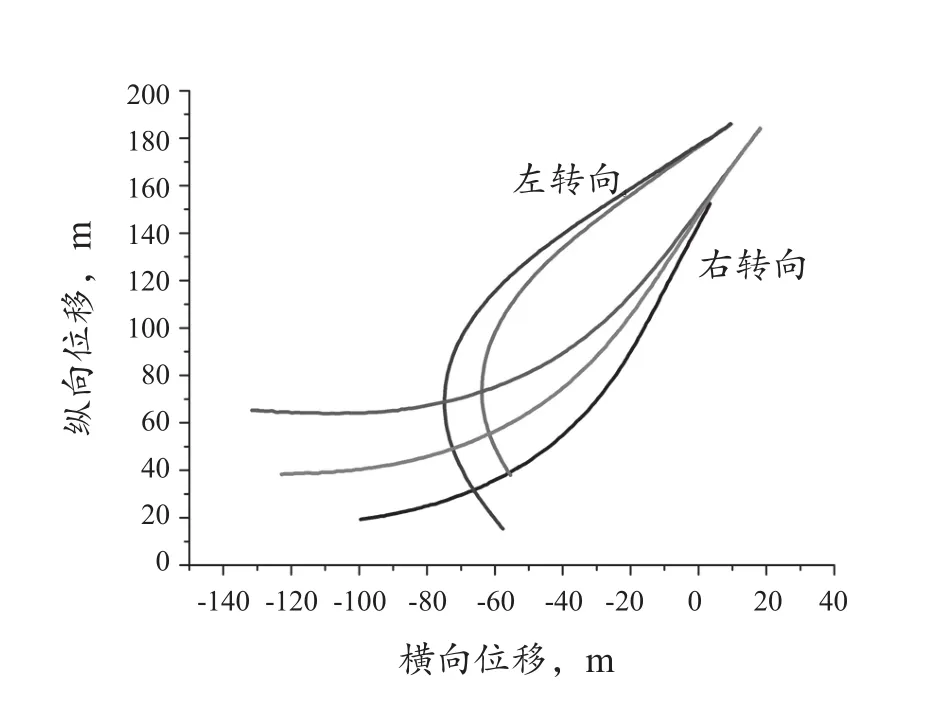
图1 A值计算过程的车辆轨迹图
二、车辆模型辨识
根据ECE R13H关于A值定义,A值是使汽车产生稳定0.3 g侧向加速度时的方向盘转角。如何得到80 km/h速度下0.3 g稳态侧向加速度是求解A值的关键。为了克服场地和速度的影响,这里采取试验与仿真相结合的方法。首先,对试验车辆进行简单的脉冲试验,利用试验数据对车辆模型进行辨识,得到车辆在这个试验工况下的线性频响函数,对函数求逆,得到其逆函数,根据0.3 g的输入求得对应的方向盘转角,即A值。
当车辆的侧向加速度小于等于0.3 g时,轮胎模型可以被认为是一个线性模型。因此,在描述操纵稳定性时可以把整个车辆系统模型简化为低维度线性动力学模型,以便系统辨识。在二自由度模型结构的基础上,输入脉冲或阶跃信号,甚至是驾驶员转向信号,满足系统辨识中对持续激励阶数信号的要求,激发系统的频响特性。这样,基于试验和理论相结合对车辆操纵稳定性动力学模型进行辨识的条件是充分的,该试验状况下的车辆具备可辨识性。
系统辨识法是指根据已知的输入信号和输出信号,按照误差最小准则选取一个能近似替代车辆系统的模型。该试验中,将角阶跃试验工况下的车辆系统近似视为二阶系统,采用二自由度模型对其加以辨识。
将复杂的车辆简化成理想车辆模型, 得出所需要车辆的动力学参数(见公式1)。

其中,V(s)是汽车的侧向加速度Ÿ对转向盘转角的传递函数,Gay是侧向加速度的稳态增益,T1、T2、Ty1、Ty2是常数,反映了汽车结构参数和本身动态特性。
对于不同的车辆,利用车辆阶跃试验数据,得到实车的基本参数,再根据最小二乘法(LSM)对系统的系数(T1、T2、Ty1、Ty2)进行辨识,得到所需的车辆模型参数。
三、模型的实车验证
为保证仿真与实车的试验对比有效性,选取一辆具有速度巡航功能的车辆,由一名熟练试车员驾驶。以开环斜坡角输入试验和脉冲试验的实车试验数据为参考,根据采集到的侧向加速度和方向盘转角辨识得到当前工况下的车辆模型。对车辆模型验证分别进行80 km/h的方向盘50°的转角阶跃和脉冲试验,选择由试车员实施阶跃试验得到侧向加速和脉冲试验的横摆角速度与车辆模型输出数据进行对比,如图2和图3所示,总体上,仿真曲线和试验数据点的分布趋势具有较好的一致性,表明所辨识的车辆模型具有很高的准确性。
为了消除驾驶员所带来的误差,进一步验证80 km/h速度下车辆模型的准确性,利用AEB公司的转向机器人SR60对车辆转向进行控制,进行80 km/h方向盘50°转角的阶跃试验,得到车辆在阶跃试验的侧向加速度曲线,并与通过车辆频响函数得到的加速度曲线进行对比(见图4),曲线有较好的一致性,从而验证80 km/h速度下车辆系统频响函数的正确性。
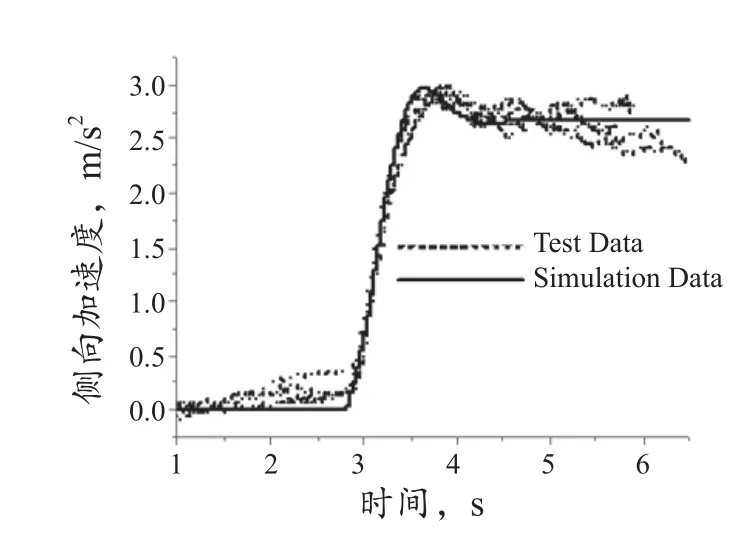
图2 仿真与实车的角阶跃试验数据的对比
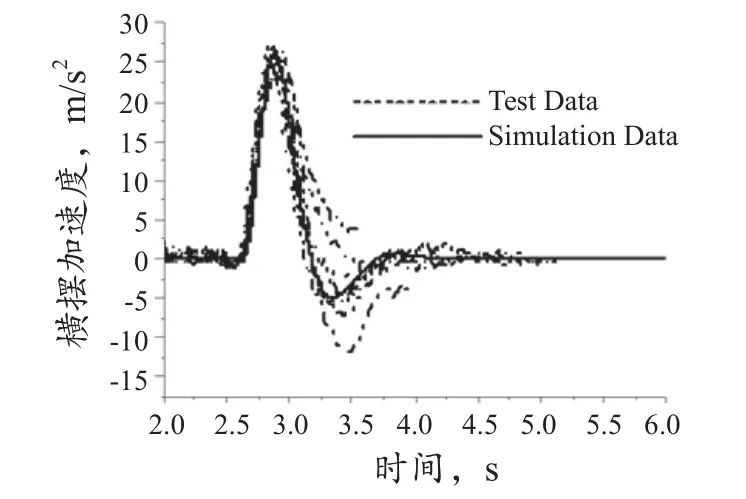
图3 仿真与实车的角脉冲试验数据对比
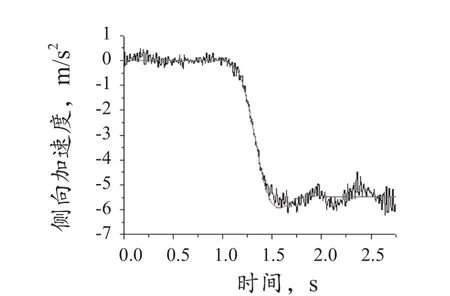
图4 仿真曲线和实车曲线对比图
四、A值的计算与验证
如果车辆不是进行大侧向加速度剧烈运动或者在摩擦系数低的路面上进行转向操作,轮胎处于线性区间,那么汽车的运动处于线性范围内。车辆电子稳定系统稳定测试要求路面摩擦系数大于0.9以上,A值的计算要求速度在80 km/h,目标稳态值为0.3g。整个计算过程中,车辆处于线性区域。通过研究线性车辆操纵动力的频域方法从而得到A值。
在频域内,线性车辆运动的输入矢量f与频响函数H、响应矢量x之间的关系为

式(3)中:U、V为H奇异值分解的两个酉矩阵;Λ为H奇异值组成的对角阵。
频域法是在频域内建立系统的频域函数模型,进而通过系统的输出识别动态输入的过程。通过频响函数求逆,乘以0.3g的响应目标,就得到对应的A值。并与实际FMVSS 126进行的A值计算进行对比(见表2)。

表2 计算与模拟A值对比表
可以看出,频响函数计算得到A值接近实际值。
车辆电子稳定性试验A值的计算方法相比上述其他成熟的试验方法而言有以下几个优点:
① 可以不需要较大的场地;
② 试验准确度较好;
③ 对驾驶员的驾驶水平要求不高;
④ 利用阶跃或脉冲试验进行计算,节省试验时间,节省成本。
五、结 论
车辆电子稳定系统是目前发展最快的汽车主动安全设备,其技术已经日臻成熟,试验方法也逐渐完善。文中利用试验辨识的方法对车辆性能进行辨识,得到简单的车辆模型,通过计算得到ESC试验所需的A值,通过实车试验对比验证,频响函数计算得到的A值与实际测试的结果具有较好的一致性。为相关标准的制修订提供借鉴。
The A value is one of the most important measured value in ESC test. A value has different calculation methods in the different test standards and its value is affected by vehicle speed and driver. In this paper, the performance identification of the vehicle is carried out by using the experimental identification method. The frequency response function which express vehicle performance at 80 km/h is obtained with test identification method, the steering angle which is A value under 0.3g lateral acceleration is calculated by applying inverse matrix of frequency response function, and the measurement error is avoided. The example verification shows that the calculation results are in good agreement with the experiment results.
System identification; Vehicle model; Measurement error; ESC test
注:[1] 本文由上海市优秀学术/技术带头人计划资助(项目编号:16XD1421400)
上海机动车检测认证技术研究中心有限公司)